Изобретение относится к силовой электронике и может быть использовано при создании систем мощного частотно-регулируемого электропривода переменного тока.
Известны способы 120-и 150-градусного управления трехфазными мостовыми преобразователями, обеспечивающие удовлетворительный гармонический состав выходного сигнала, форма которого в этих случаях существенно зависит от характера и параметров нагрузки, что офаничивает широкое применение подобных алгоритмов управления в преобразователях для электропривода.
Известен гакже инвариантный к параметрам нагрузки способ симметричного
180-градусного управления трехфазным од- номостовым преобразователем, при управлении по которому связанное регулирование выходных частоты и величины напряжения осуществляют за счет постоянной поэтапной вариации по определенным зависимостям длительностей сигналов управления и пауз между ними, формируемых на центральных участках тактовых интервалов 60-градусных продолжительностей, расположенных в серединах соответствующих полупериодов управления Граничные частоты между соответствующими поддиапазонами регули- рования находятся при в функциональной связи с величиной дидпа зона регулирования и числом синточируеV
ел
о
№
ых основных сигналов управления внутри оловин упомянутых тактовых интервалов
Однахо спектральный состав выходного апряжения преобразователя в этом случае е во всех точках диапазона регулирования ожет удовлетворить потребителя, в частности имеют место зоны управления с знаительной по амплитуде пятой паразитной гармонической составляющей.
Целью изобретения является улучшение гармонического состава выходного напряжения преобразователя в процессе Связанного регулирования частоты и величины напряжения, осуществляемого в диапазоне выходных частот FO-, -|-п .
I,D to
При управлении по способу, при котором основные вентили разных фаз и групп трехфазного мостового преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл град в последовательности +А, -С, -iB, -A, +C, -В, при этом для каждого вентиля в течение одного полупериода от 0 до 180 эл. град формируют прложительные полупериоды проводимости, а от 180 до 360 эл град - отрицательные полупериоды закрытого состояния, на тактовых интервалах проводимости 60-120 эл. град и на тактовых интервалах закрытого состояния 240-300 эл. град формируют разноименные с соответствующим полупериодом управления модулирующие сигналы управления, количество i которых последовательно поэтапно уменьшается с ростом выходной частоты F за счет соответствующей вариации длительностей основных и модулирующих управляющих сигналов, причем на начальной выходной частоте F0 тактовые интервалы разбивают на четное п количество подин- тервалов, в середине каждого из которых формируют модулирующие сигналы управления, в диапазоне частот F0
En
Fo В
2Е0
центрах указанных тактовых интервалов формируют модулирующие сигналы управления с продолжительностью, равной 1 /30F (12 эл. град), длительность тактовых подин0,8 тервалов принимают равной , на
О П
каждой половине тактового интервала начало каждого первого и конец каждого послед- неготактовогоподинтервала
синхронизируют соответственно с началом тактового интервала, с границами центрального модулирующего сигнала управления и с концом тактового интервала, при этом весь диапазон регулирования разбивают на поддиапазоны при повышении выходной частоты преобразователя переход от нечетного количества модулирующих сигналов управления, формируемых внутри каждого из крайних 24-градусных участков тактовых интервалов, к четному производят на частотах F а переход от четного числа сигналов к нечетному - на.частотах F , на частотных поддиапазонах F F F ц-i длительность модулирующих сигналов управ1 1 2 F ления определяют как Я -- ( - )
1О( г го Ьп
, на частотных поддиапазонах F I F F 1+1 в центрах 24-градусных участков формируют модулирующие сигналы управления с длительностью ii 0,8 1.6, (1-1)Е+1,6Ео
Я Т2ТТГРоТ 1 а продол
жительность остальных модулирующих сигналов управления определяют в соответствиисзависимостью
, 0,8 Е, - 0,8 Ео
л значения граничных чэb t-0 t-m
стот, переходных от одного поддиапазона регулирования к другому, находят как
J FO Eln
h 2T(F-T)ET2Eo-:
ц F0E(l-1)n Fl 5TF-T7TE--ZE а в диапазоне выходных частот преобразоЕЛ FO En FO
вателя центрах тактовых
Ј Со1 ,О По
интервалов синтезируют по одному модулирующему сигналу управления с длительно1 1, БТ En
соответственно текущая и номинальная (минимальная) амплитуды питающего преобра- зовйтель напряжения.
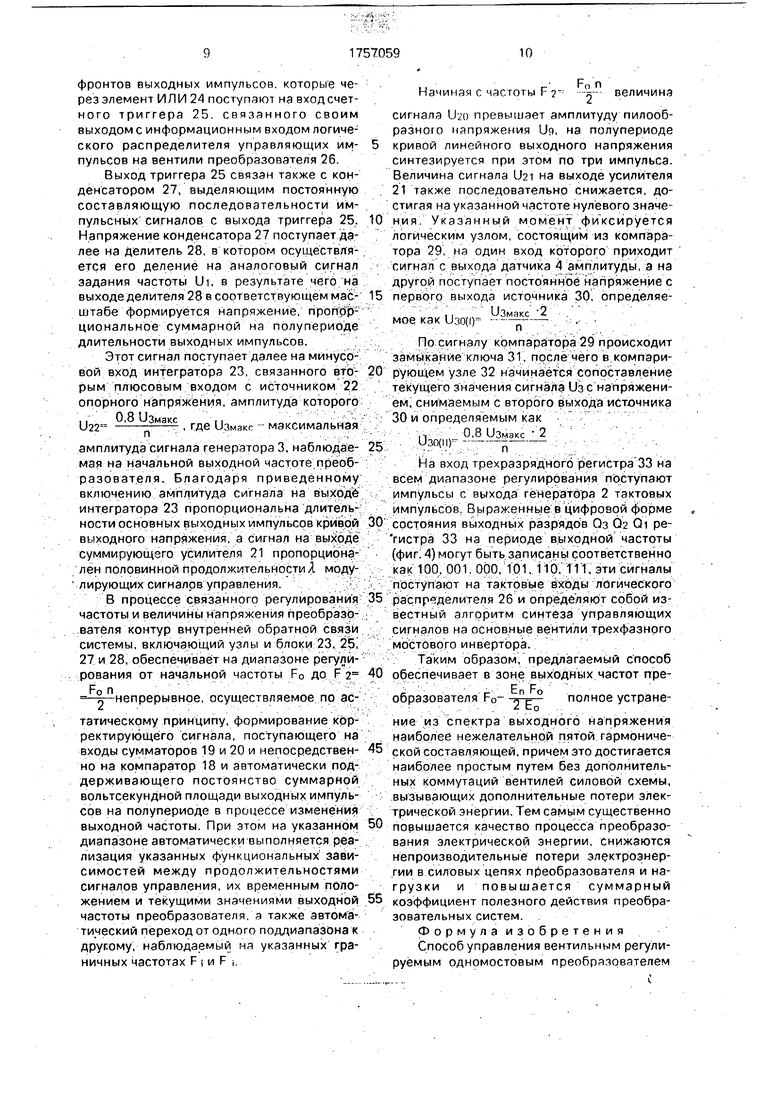
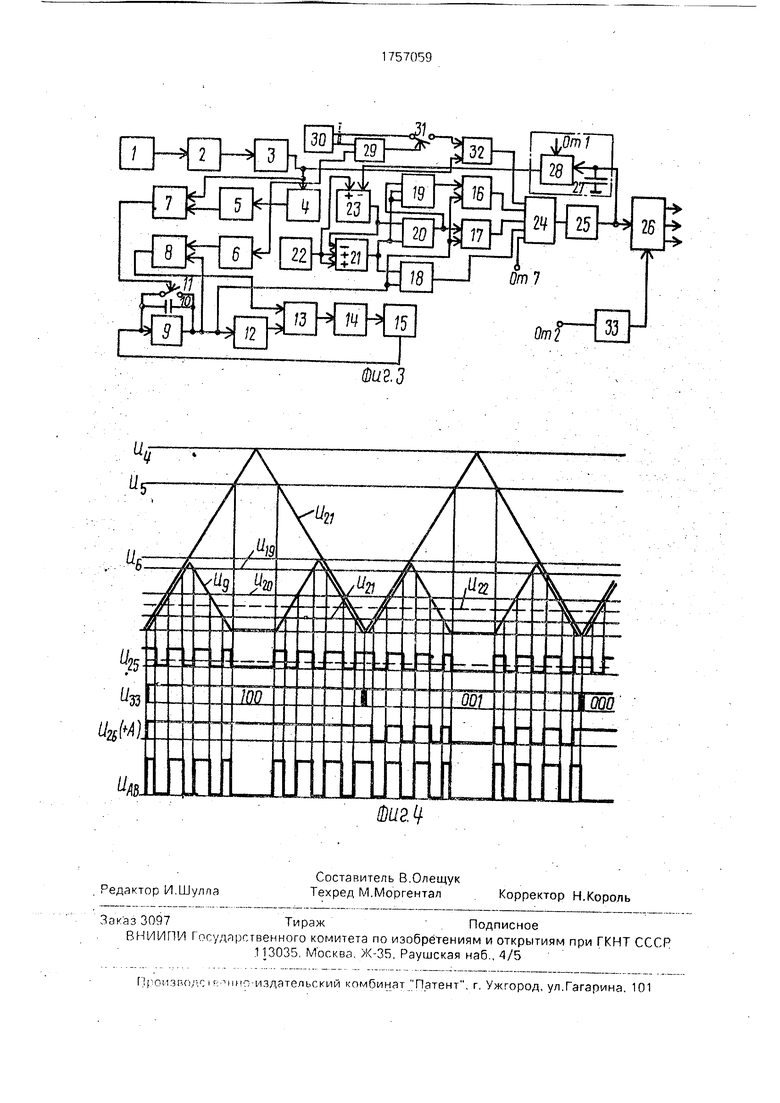
На фиг. 1 представлена структура основных силовых цепей трехфазного одномо- стового преобразователя, выполненного на запираемых тиристорах и нагруженного на асинхронный двигатель AD, на фиг. 2 - временные диаграммы иллюстрирующие алгоритм формирования управляющих сигналов на вентили преобразователя в соответствии с предлагаемым способом; на фиг 3 - блок- схема системы управления преобразователем, реализующей разработанный алгоритм управления; на фиг 4 - временные диаграммы ее работы
Временные диаграммы (фиг. 2) поясняют порядок формирования управляющих е сигналов (импульсов) Uy на вентиль +А силовой схемы преобразователя, а кривые линейного выходного напряжения преобразователя UAB соответствуют варианту , когда на начальной выходной частоте FO (фиг. 2а) центральные на
0
5
0
5
0
5
0
5
0
стью
Е и Ео полупериодах тактовые интервалы 60 120 эл град внутри полупериода проводимости каждого вентиля и 240 300 эл. град внутри полупериода закрытого состояния разбиваются соответственно на восемь подинтер48валов продолжительностью - эл. град
каждый, т.е. в б эл. град на частоте F0, которые показаны тонкими дугами (фиг. 2).
Внутри и в середине каждого из подин- тервалов формируются модулирующие сиг- налы управления, разноименные с соответствующим полупериодом управления (запирающие вентили модулирующие сигналы управления на полупериоде прово димости и отпирающие модулирующие сигналы управления внутри полупериодов закрытого состояния) При этом в середине каждого тактового интервала на участке протяженностью 12 эл град формируются центральные модулирующие сигналы. Внутри тактовых интервалов на каждой половине тактового интервала начало каждого первого и конец каждого последнего тактового подинтервалэ синхронизируются соответственно с началом тактового интервала, с границами центрального модулирующего сигнала управления и концом тактового интервала.
Регулирование величины выходного напряжения осуществляется при этом путем изменения продолжительности указанных модулирующих сигналов, причем относительная (выраженная в градусах) продолжительность центральных модулирующих сигналов управления на большей части диапазона регулирования, вплоть до повышенных выходных частот, остается постоянной и равной 12 эл. град.
Общий диапазон связанного регулирования величины и частоты выходного напряжения преобразователя по экономичному закону постоянства отношения величины напряжения к частоте при рассмотривае- мом алгоритме управления составляет FoEn 1,6Е0
текущее и номинальное (минимальное) значения питающего преобразователь напряжения. При этом в диапазоне выходных EnFo
Foгде Е и Ео - соответственно
частот F0регулирование частоты
2Е0
осуществляется за счет постоянной плавной поэтапной вариации длительностей ос- новных и модулирующих сигналов управления, формируемых в серединах отрезков 24-градусных продолжительностей. Процесс регулирования преобразователя характеризуется в этом случае послеДОВЭТРЛЫШМ переходом ог одною из спорных алгоритмов упрявленич к другому и наоборот С ростом выходной частоты прр образователя переход от нечетного i коти- чества модулирующих управляющих сигналов, формируемых внутри каждого из 24 градусных отрезков, к четному (i 1) числу сигналов осуществляется на граничных час тотэх FI определяемы как
0
5
0
5
0
5
0
ci
Г| -- X
Fo F,
9 (- + 9 свою очередь пе
реход от четного i (другие численные значения i) к нечетному (М) чиспу модулирующих сигналов управления производится на граFo E(i -1)п ничных частотах F , ъ / ч с -пг:
/ 1 (I - I )t - г: t
При этом внутри частотных поддиапазонов F i F FiH длительность модулирующих сигналов управления определяется как
з 1,1 2 Ео
А гс ( с - -р-Е ) внутри поддиэпазоI Э г г о tn
нов F i F - F 1+1 в центрах 24-градусных отрезков тактовых интервалов формируют модулирующие сигналы управления с изме- няющейсяпродолжительностью
J -Q- - 1 §liir.1Ji±J 6Eo Л 12 F En ющей близ ого к нулю значения на частоте F i, а длительность Я основного массива модулирующих сигналов управления равна
, 0,8 Е, - 0,8 Ео
при этом А -g-pF.
О FO П EI
На верхнем частотном поддиапазоне
г- FO En |,6Ё0
достигапри -д-р- F r,c в центрах тактовых
2Е0
интервалов формируется по одному модулирующему сигналу управления с продолжительностью
1 1.6 Ео ВТ EnFo Синтезирование на большей части частотного диапазона работы преобразователя
0
5
в области F0F0En
в центрах тактовых
2Е0
интервалов модулирующих сигналов управления с продолжительностью в 12 эл. град позволяет полностью исключить из спектра выходного напряжения наиболее нежелательную пятую гармоническую составляющую. На всем рабочем диапазоне переход от одного поддиапазона регулирования к другому осуществляется плавным поэтапным изменением до близких к нулю значений продолжительностей формируемых в тактовых точках основных и модулирующих сигналов управления.
В соответствии с указанной последовательностью формирования управляющих сигналов при анализируемом варианте ре«/ ироплния () на первом частотном под- in.-.мз-юне увеличение выходной частоты чроогфазояателя от начального значения, равною FO. производится, как показано стрелками (фиг. 2а), за счет последовательного уменьшения продолжительности центральных на 24-грэдускых участках основных сигналов управления, которая уменьшается до близких к нулю значений на частоте F i - F0(i-1)n 12F
F 2ГП-Т) ho
что F. - EO).
Длительность Я модулирующих сигналовуправленияприэтомi
А -0 (принимают,
Т5
1 1 - 2 - 1 ( 1 - 1 На
г4( (F TF7bHa
12
чиная с отмеченной частоты F 4 -7-5- F0 и
11
до частоты F 3
F08
Внутри
24-градусных участков, формируется по три модулирующих сигнала управления (фиг. 26, ), продолжительность крайних из которых остается постоянной и равной
Я 0,8-3-0,8 1
F0. я длительность
FF5 W W центрального сигнала изменяется (уменьшается с ростом частоты) по зависимости
,1 0,8
Лin г 1.6-2-3 + 1,6
Т2Т 12 8-37F0 15 F 180 F0 На следущем поддиапазоне регулирования, продолжающемся при Н2 в диапазо(фиг. 2в),
не частот
8 FO А гF3-F 4 FO
продолжительность модулирующих управляющих сигналов плавно уменьшается с ростом выходной частоты в соответствии с зависимостью
о
4F0
достигает близкого к нулю значения на частоте F 2. После этого и до номинальной вызависимостыи
, 1 ( 1 2,1,1 я Ж-2 (Т 30 ( F
ходной частоты
5 Fn 1.6
полуволна
линейного выходного напряжения преобразователя формируется из трех импульсов на полупериоде (фиг, 2г), увеличение величины выходного напряжения при росте частоты достигается за счет изменения (уменьшения) продолжительности Я центральных на тактовых интервалах модулирующих сигналов по соотношению
, 1 1,6
5Fo
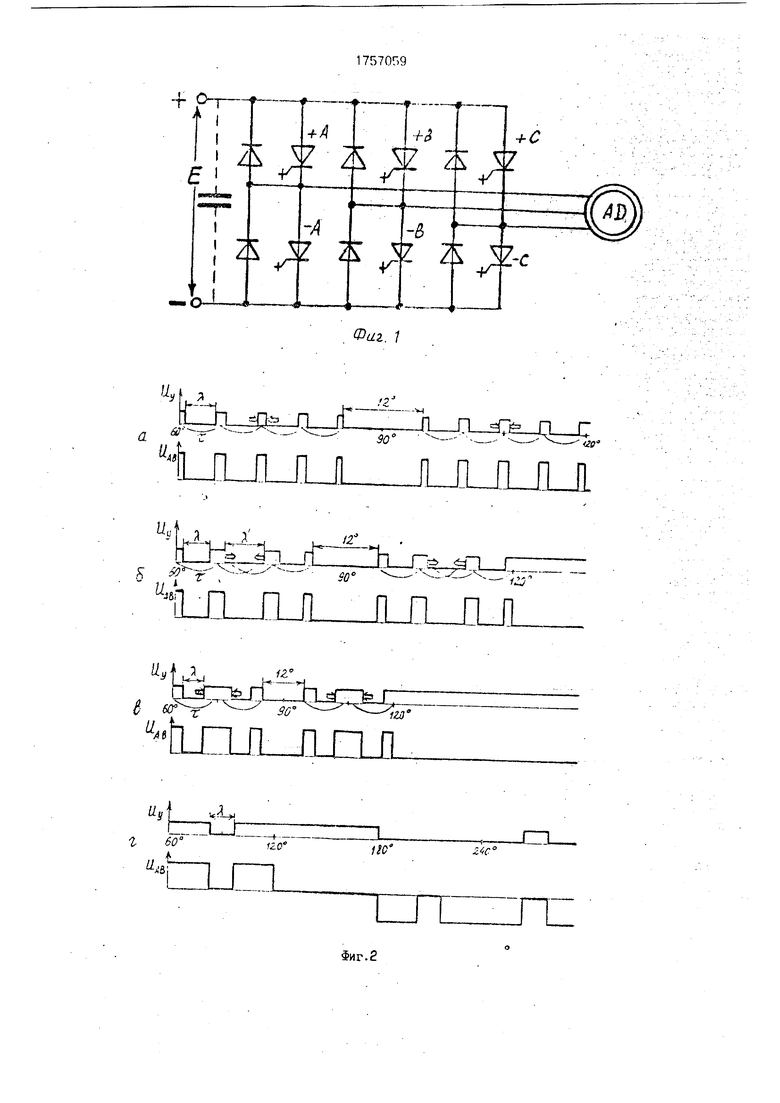
На фиг. 3 изображена структура выполненной по вертикальному принципу системы управления преобр-азовэтелем по указанному алгоритму управления применительно к варианту управления с (). В указанной системе управления выходной сигнал Ui блока 1 задания частоты поступает на вход генератора 2 тактовых
импульсов, формирующего последовательность импульсов, частота следования которых на всем диапазоне регулирования в 12 раз превышает выходную частоту преобразователя. Указанные сигналы поступают на
0 вход генератора 3 линейно-изменяющегося напряжения, синхронизируя его работу, благодаря чему на выходе генератора 3 формируется симметричное в обе стороны напряжение 1)з шестикратной частоты по
5 сравнению с выходным сигналом преобразователя (фиг. 4), амплитуда которого уменьшается пропорционально росту выходной частоты и постоянно фиксируется датчиком 4 амплитуды. С выхода датчика 4 сигнал,
0 пропорциональный амплитуде напряжения Уз, поступает через усилит ли 5 и 6 на входы компаратооов 7 и 8, в которых сопоставляется соответственно с выходными напряжениями Уз генератора 3 и Ug интегратора 9,
5 цепь накопительного элемента 10 которого периодически шунтируется ключом 11, управляемым выходным сигналом компаратора 7. Коэффициенты передачи усилителей 5 и 6 соответственно равны 0,8 и 0,4. На выхо0 де интегратора 9 включен пороговый узел 12, фиксирующий минимальное (нулевое) значение напряжения Ug, который через элемент ИЛИ 13 связан с входом счетного триггера 14, подключенного своим выходом
5 к коммутатору 15 полярности зарядного напряжения интегратора 9. причем параметры интегратора 9 и амплитуда выходных разно- полярных сигналов блока 15 подбираются так, что крутизна сигналов Уз и Ug идентич0 ная, Благодаря приведенной схеме соединения узлов 5-15 и соответствующей начальной уставке импульсных элементов на выходе интегратора 9 (фиг. 4) формируется симметричное пилообразное напряже5 ние Ug с паузами нулевого уровня на
центральных участках тактовых интервалов.
Указанный сигнал Ug, являясь основным
развертывающим напряжением в системе,
поступает на входы компарирующих узлов
0 16-18, на выходах которых включены цепи формирования коротких однополярных импульсов. На другие входы компарирующих узлов 16-18 поступают сигналы с выходов сумматоров 19 и 20 и усилителя 21с коэф5 фициентом передачи 0,5, на входы которого приходят сигналы с источника 22 опорного напряжения и интегратора 23. В момент равенства указанных сигналов на входах узлов 16-18 системой синтезируются команды (короткие импульсы) на формирование
фронтов выходных импульсов которые че- резэлемент ИЛИ 24 поступают на входсчет- ного триггера 25 связанного своим выходом с информационным входом логического распределителя управляющих им- пульсов на вентили преобразователя 26
Выход триггера 25 связан также с конденсатором 27, выделяющим постоянную составляющую последовательности импульсных сигналов с выхода триггера 25. Напряжение конденсатора 27 поступает далее на делитель 28, в котором осуществляется его деление на аналоговый сигнал задания частоты UL в результате чего на выходе делителя 28 в соответствующем мае- штабе формируется напряжение, пропорциональное суммарной на полупериоде длительности выходных импульсов.
Этот сигнал поступает далее на минусовой вход интегратора 23, связанного вто- рым плюсовым входом с источником 22 опорного напряжения, амплитуда которого
0,8 Узмакс
U22
, где Узмакг максимальная
амплитуда сигнала генератора 3, наблюдав- мая на начальной выходной частоте преобразователя. Благодаря приведенному включению амплитуда сигнала на выходе интегратора 23 пропорциональна длительности основных выходных импульсов кривой выходного напряжения, а сигнал на выходе суммирующего усилителя 21 пропорционален половинной продолжительности А модулирующих сигналов управления
В процессе связанного регулирования частоты и величины напряжения преобразователя контур внутренней обратной связи системы, включающий узлы и блоки 23, 25, 27 и 28, обеспечивает на диапазоне регулирования от начальной частоты F0 до F 2
- непрерывное, осуществляемое по астатическому принципу, формирование корректирующего сигнала, поступающего на входы сумматоров 19 и 20 и непосредствен- но на компаратор 18 и автоматически поддерживающего постоянство суммарной вольтсекундной площади выходных импульсов на полупериоде в процессе изменения выходной частоты При этом на указанном диапазоне автоматически выполняется реализация указанных функциональных зависимостей между продолжительностями сигналов управления, их временным положением и текущими значениями выходной частоты преобразователя а также автоматический переход от одного поддиапазона к другому, наблюдаемый ня указанных граничных частотах F(и F ,
Начиная с частоты Г
FO П
2
величина
сигнала IJ20 превышает амплитуду пилообразного напряжения Uq, на полупериоде кривой линейного выходного напряжения синтезируется при этом по три импульса Величина сигнала 1)21 на выходе усилителя 21 также последовательно снижается, достигая на указанной частоте нулевого значения Указанный момент фиксируется логическим узлом, состоящим из компаратора 29 на один вход которого приходит сигнал с выхода датчика 4 амплитуды, а на другой поступает постоянное напряжение с первого выхода источника 30, определяе iиЗмакс
мое как Ujoor-
По сигналу компаратора 29 происходит замыкание ключа 31, после чего в компэри- рующем узле 32 начинается сопоставление текущего значения сигнала Уз с напряжением, снимаемым с второго выхода источника 30 и определяемым как
.,0,8 Узмакс 2
Озсхпгр
На вход трехразрядного регистра 33 на всем диапазоне регулирования поступают импульсы с выхода генератора 2 тактовых импульсов Выраженные в цифровой форме состояния выходных разрядов Оз 02 Qi pe- гистра 33 на периоде выходной частоты (фиг 4) могут быть записаны соответственно как 100,001 000, 101, 110, 111, эти сигналы поступают на тактовые входы логического распределителя 26 и определяют собой известный алгоритм синтезэ управляющих сигналов на основные вентили трехфазного мостового инвертора.
Таким образом, предлагаемый способ обеспечивает в зоне выходных частот преобразователя FQEnF0
полное устранение из спектра выходного напряжения наиболее нежелательной пятой гармонической составляющей, причем это достигается наиболее простым путем без дополнительных коммутаций вентилей силовой схемы, вызывающих дополнительные потери электрической энергии Тем самым существенно повышается качество процесса преобразования электрической энергии, снижаются непроизводительные потери электроэнергии в силовых цепях преобразователя и нагрузки и повышается суммарный коэффициент полезного действия преобразовательных систем
Формула изобретения Способ управления вентильным регулируемым одномостовым преобразователем
по закону постоянства отношения величины напряжения к частоте, заключающийся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фззовым сдвигом в 60 эл. град в последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля в течение одного полупориода от О до 180 эл. град формируют положительные полупериоды проводимости, а от 180 до 360 эл. град - отрицательные полупериоды закрытого состояния, на тактовых интервалах проводимости от 60 до 120 эл. град и на тактовых интервалах закрытого состояния от 240 до 300 эл. град формируют разноименные с соответствующим полупериодом управления модулирующие сигналы управления, количество I которых внутри каждой половины тактового интервала последовательно уменьшают с ростом выходной частоты преобразователя F путем изменения длительностей основных и модулирующих управляющих сигналов, формируемых в тактовых точках, причем на начальной выходной частоте F0 упомянутые тактовые интервалы разбивают на четное п количество подинтервалов, в середине каждого из которых формируют упомянутые модулирующие сигналы управления, отличающийся тем, что, с целью улучшения гармони
-
ческого состава выходного напряжения преобразователя в процессе связанного регулирования частоты и величины напряжения, осуществляемого в диапазоне F0En
выходных частот F0-
I ,D to
в диапазоне
в центрах указанных
2 Ео
тактовых интервалов формируют модулирующие сигналы управления с продолжительностью, равной 1/30F (12 эл. град), длительность упомянутых тактовых .подин. 0,8
тервалов принимают равной , на
и го п
каждой половине тактового интервала начало каждого первого и конец каждого гослед- неготактовогоподинтервзла
синхронизируют соответственно с началом
тактового интервала, с границами упомяну того центрального модулирующего сигнала управления и с концом тактового интервала, при этом весь диапазон регулирования разбивают на поддиапазоны, при повышении выходной частоты преобразователя переход от нечетного количества модулирующих сигналов управления, формируемых внутри каждого из крайних двадцатичетырехградусных участков тактовых интервалов, к четному производят на частотах F , а переход от четного числа упомянутых сигналов к нечетному - на частотах F , на частотных поддиапазонах Fi F Fj+i длительность
модулирующих сигналов управления определяют как
30
Я - -;
1 Л 2Ео
), на частотных
,F0En поддиапазонах Fi F F щ в центрах упо20 мянутых двадцатичетырехградусных участков формируют модулирующие сигналы управлениясдлительностью
Я 0.8 1,6i(i-1)E+ 1,6Eo Я Т2Т127Л - Э ДЛИ
25 тельность остальных модулирующих сигналов управления определяют в соответствии
, 0,8 EI - 0,8 Ео
с зависимостью Я с г- г--
о F0 tin
значения граничных частот, переходных от одного поддиапазона регулирования к другому, находят как
F
FO Ejp
2 1(1-1) E + 2 Ео
Fo E(i-1)n ЩРТ)
а в диапазоне выходных частот преобразователя л гг - в центрах тактовых
/toi,u to
интервалов синтезируют по одному модулирующему сигналу управления с длительностью X - тгр - -р-р- гДе Е и Ео соответственно текущая и номинальная (минимальная) амплитуды питающего преобразователь напряжения.
Јн п го
vl
СЛ
О Л СО
30
LdK
AMI

Сущность изобретения1 способ управления заключается в периодическом включении и выключении с взаимным фазовым сдвигом в 60 эл град основных вентилей преобразователя В серединах полупериодов проводимости и закрытого состояния вентилей формируются разноименные с соответствующим полупериодом модулирующие сигналы управления, за счет нелинейной модуляции продолжитсяьно- стей которых обеспечивается плавный переход от одного поддиапазона регулирования к другому Новым в способе управления является то, что на большей части диапазона регулирования (на четырех пчтых общего диапазона регулирования) в серединах центральных на полупериодах тактовых интер- валов формируются дополнительные модулирующие сигналы управления 12-градусных продолжительное гей, а формирование остальных модулирующих сигналов управления производится по модифицированным нелинейным зависимостям относительно середин боковых 24-градусных интервалов соответствующих тактовых интервалов 4 ил (Л с
и,
Ui
A
Ц
Ј
U
-
-
Фиг.з
Л
| Забродин Ю.С Автономные тиристор- ные инверторы с широтно-импульсныи регулированием.-М Энергия, 1977, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Олещук В.И., Чуру Ф.Ф | |||
| Широкодиапазонное регулирование трехфазных инверторов на- пряжения с постоянным периодом коммутации-Электричество, 1988, № 6, с | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
