1 Изобретение относится к машиностроению, а именно, к манипуляторам, преимущественно копирующим, предназначенным для работы в недоступных дл человека условиях. Известен исполнительный орган манипулятора, содержащий шарнирно соединенные между собой плечо, предплечье, кисть, приводы вращения и ка чания плеча, а также индивидуальные приводы качания и вращения предплечья и йисти. Недостатком известного манипуля-тора являются низкие динамические характеристики, обусловленные тем, что привод вращения кисти, связан- ньй с кистью с помощью системы конических шестерен, закреплен в предплечье на валу привода качания кисти связанного с кистью трособлочной сис темой, что вызьшает нагружение привода качания кисти реактивным моментом привода ее вращения при одновременной их работе. Это увеличивает габариты предплечья и снижает динамические качества исполнительного органа. Целью изобретения является улучшение динамических характеристик исполнительного органа манипулятора Поставленная цель достигается тем, что исполнительный орган манипулятора, содержащий шарнирно соединенные мехсду собой плечо, предплечье кисть, приводы качания и вращения плеча, а также индивидуальные приводы качания и вращения предплечья и кисти,, снабжен волновой передачей, смонтированной в кисти, кареткой с гибким валом, стаканом и зубчатой му фтой, а предплечье выполнено в виде полого корпуса, в котором размещен стакан, связанньй посредством зубчатой муфты с приводом вращения предплечья, при этом стакан жестко связан с плечом, а привод вращения кисти расположен в стакане и кинематически связан с волновой передачей посредством каретки с гибким валом. На фиг.1 изображен исполнительный орган манипулятора (оси всех шарниро условно показаны в одной плоскости) на фиг.2 - разрез А-А фиг.1; на фиг.З - разрез В-Б фиг.2. Исполнительньй орган манипулятора состоит из основания 1 с закрепленными на нем приводами вращения и качания плеча 2, приводом 3 качания , 72 предплечья, предплечья 4, приводом 5 вращения предплечья, приводом 6 качания кисти и приводом вращения кисти 7, кисти 8. В корпусе предплечья 4 расположен привод 5 вращения предплечья, состоящий из злектродвигателя 9, на валу которого закреплено зубчатое колесо- муфта 10, кулачка 11, гибкого подшипника 12, гибкого колеса 13 и жесткого колеса 14. Электродвигатель 9 с помощью зубчатого кольца 15 прикреплен через зубчатую муфту 16 к стакану 17, который через опорньй фланец 18 крепится к приводу 3 качания предплечья. Внутри стакана 17 размещен привод вращения кисти 7, например, электродвигатель, на валу которого закреплена шестерня 19, зацепленная с паразитной шестерней 20, которая в свою очередь находится в зацеплении с центральной шестерней 21, размещенной соосно электродвигателю 7 на подшипниках 22. Шестерня 21 находится в зацеплении с зубчатым колесом 23, которое связано с приводным валом 24. На последнем с возможностью осевого перемещения вместе с кареткой 25 закреплена шестерня 26, находящаяся в зацеплении с шестерней 27, установленной на валу 28. На каретке 25 закреплен один конец брони 29 гибкого вала 30, -связанного с валом 28. На корпусе каретки 25 выполнен паз, в который входит.реактивньй вал 31 с размещенной на нем пружиной 3.2. С приводным валом 24 кинематически связаны датчик скорости вращения кисти 33 и датчик угловых перемещений кисти 34. Датчик угловых перемещений 35 и датчик скорости вращения 36 предплечья связаны с кулачком 11 привода 5 вращения предплечья. Стакан 17 закреплен в корпусе предплечья 4 на подшипниках 37 и 38, причем последний - через опору 39, в которой, имеется вырез для перемещения каретки 25, реактивного вала 31 и приводов электропитания 40, осуществлякяцих подачу энергии к приводу 6 качания кисти и датчикам скорости и угловых перемещений, проходящих внутри корпуса предплечья 4. Другой конец брони 29 гибкого вала 30 закреплен на корпусе кисти 8, внутри которой расположена волновая передача вращения кисти 8, состоящая из кулачка 41, гибкого подшипника 42, гибкого колеса 3 43 и жесткого колеса 44, Внутри гиб, кого колеса 43 размещен пневмоциливдр зажима инструмента 45. Кулачок 41 связан через торсионный вал 46 и конические шестерни 47 и 48 с гибким валом 30. Работа исполнительного органа манипулятора осуществляется следую щим образом. Движение вращения кисти передается от электродвигателя 7 через шестерни 19, 20 и 21 и зубчатое колесо 23 на приводной вал 24, а затем через шестерни 26 и 27 и вал 28 на гиб кий вал 30 и далее через шестерни 47 и 48, вал 46 на кулачок вращения кисти. При качании кисти 8 вверх за счет работы привода 6 качания кисти Гибкий вал 30 вместе с броней 29 и кареткой 25 вьщвигается из корпуса предплечья 4, а при качании вниз втягивается внутрь за счет пружины 32 и осевой жесткости самой брони 29 При работе привода вращения предплечья 5 реактивный момент с корпуса электродвигателя 9 воспринимается 7 зубчатой муфтой 16 и через стакан 17 передается на привод 3 качания предплечья. Реактивный момент всего привода вращения предплечья с гибким колесом 13 воспринимается стаканом 17. В результате корпус предплечья 4 поворачивается относительно стакана 17 на подшипниках 37 и 38. Вместе с корпусом предплечья 4 поворачивается кисть 8 с приводом 6 качания кисти и гибкий вал 30 с зубчатым колесом 23, что вызывает вращение приводного вала 24 и датчика скорости вращения кисти 23, и датчика угловых перемещений кисти 34, в результате чего появляется сигнал управления, эквивалентный сигналу в результате аналогичного движения управляющей руки на привод вращения, кисти, который отрабатывает возмущение и восста-: навливает прежнее положение по вращению кисти относительно предплечья. Использование предложенного технического решения позволяет улучшить динамические характеристики исполнительного органа манипулятора.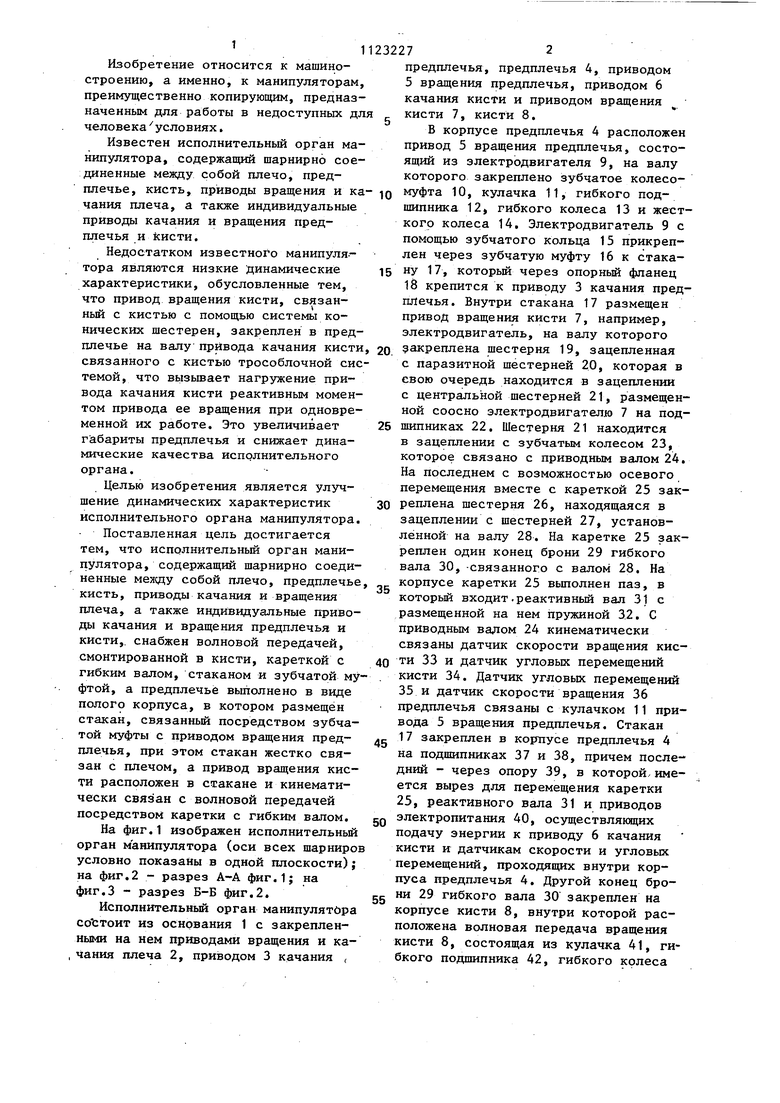

| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2285844C2 |
| Рука робота | 1991 |
|
SU1757877A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |



ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий шарнирно соединённые меязду собой плечо, предплечье, кисть, приводы качания и вращения плеча, а также индивидуальные приводы качания и вращения предплечья и кисти, отличающийся тем. что, с целью улучшения динамических характеристик, он снабжён волновой передачей, смонтированной в кисти, кареткой с гибким валом, стаканом и зубчатой муфтой, а предплечье выполнено в виде полого корпуса в котором размещен стакан, связанный посредством зубчатой муфты с приводом вращения предплечья, при этом стакан жестко связан с плечом, а привод вращения кисти расположен в стакане и кинематически связан с волновой передачей посредством каретки с гибким валом.
.
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
