Изобретение относится к машиностроению и может быть использовано в робототехнике.
Цель изобретения - повышение грузоподъемности и точности позиционирования промышленного робота за счет уменьшения двигателей и цилиндрических и конических зубчатых передач.
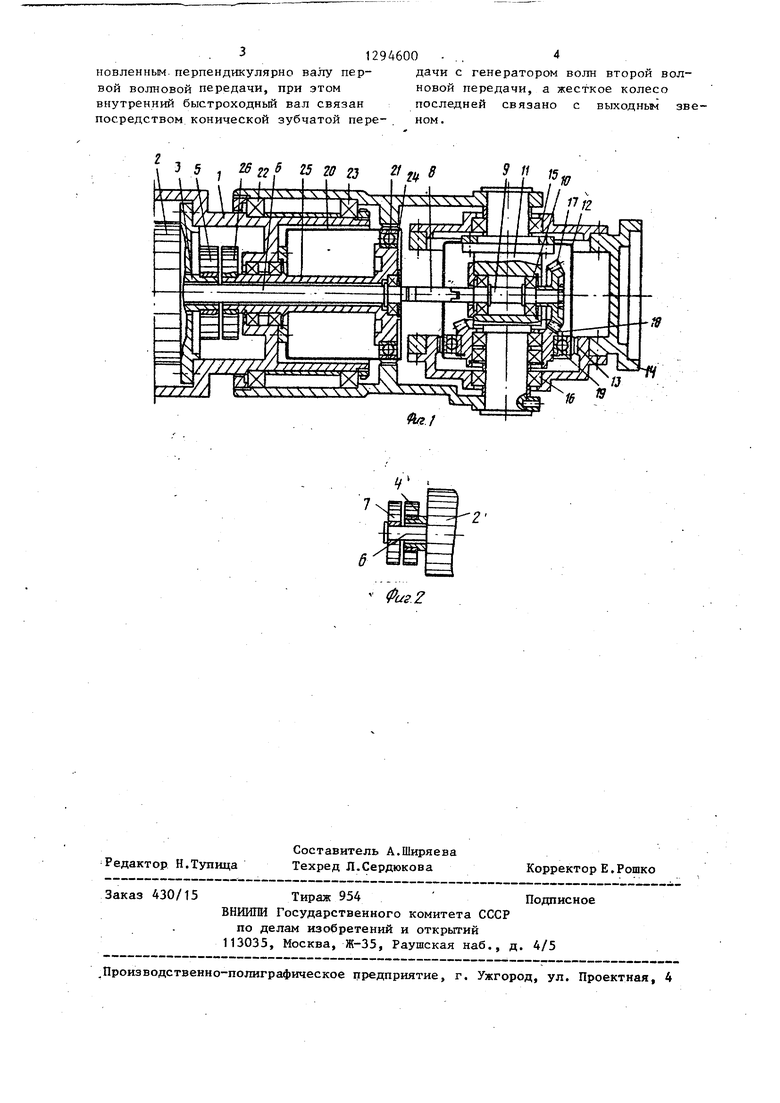
На фиг. 1 показан модуль промьш ленного робота, общий вид; на фиг. 2 - Ю При этом получает вращение связан- расположение электромагнитной муфты на заднем торце двигателя.
Модуль содержит корпус 1, в котором закреплен приводной двигатель 2, имеющий польй выходной вал 3 с двумя закрепленными на его концах полумуфтами 4 и 5 электромагнитных муфт. Внутри полого выходного вала 3 расположен быстроходный вал 6, имеющий возможность соединяться посредством 20 .полумуфты 7, закрепленной на его конце, и полумуфты 4 с выходным валом 3 двигателя 2. Быстроходный вал 6 через промежуточньй валик 8 связан с валом 9, смонтированным на подтип никовых опорах 10 внутри вала 11, на котором неподвижно закреплено гибкое зубчатое колесо 12, зацепляющееся с жестким колесом 13, связанным с выходным звеном 14, например, консолью 30 кисти, опирающимся через подшипниковые опоры 15 и 16 на вал 11. На валу 9 закреплено коническое колес5о 17, зацепляющееся с коническим колесом 18, вьшолненным заодно с генера- 35 тором 19 волн, расположенным внутри гибкого колеса 12.
, 25
ное с жестким колесом 12 выходное звено 14 вокруг вала 11 на подшипни ковых опорах 15 и 16. Из-за конструктивных ограничений выходное звен 14 не может совершать полный оборот поэтому оно реализует только качание на угол до 300° относительно оси вала 11.
Для осуществления ротации выходного звена 14 вокруг оси корпуса 1 с выходным валом 3 двигателя 2 соединяется посредством полумуфт 5 и 2 быстроходный вал 25. При этом получает вращение генератора 24 волн, деформирующий гибкое колесо 20, при водящее во вращение жесткое колесо 21, которое вращается на подшипнико вых опорах 22 и 23 относительно кор пуса 1. Жесткое колесо 21 через вал 11 приводит во вращение выходное зв но 14.
Ротационное и качательное движен выходного звена 14 могут быть реали зованы или одновременно, или поочередно . I
Формула изобретени
Внутри корпуса 1 неподвижно относительно него закреплено гибкое ко- лесо 20, зацепляющееся с жестким колесом 21, связанньм с валом 11. Жесткое колесо 21 смонтировано на подшипниках 22 и 23 на корпусе 1. Внутри гибкого колеса 20 установлен генератор 24 волн. Быстроходный вал 25 выполнен полым и установлен коак- сиально с быстроходным валом 6. Генератор 24 волн закреплен на наружном быстроходном валу 25, на котором расположена полумуфта 26 электромагнитной муфты, вторая пол5гмуфта 5 которой связана с выходным валом 3 двигателя 2.
Модуль промышленного робота рабо- тает следующим образом.
При включении двигателя 2 получает вращение его выходной вал 3. Если при этом подается напряжение на
электромагнитную муфту, Состоящую из полумуфт 4 и 7, то вращение от выходного вала 3 двигателя 2 получает быстроходньй вал 6, а от него че- .пез промежуточный валик 8, вал 9. конические зубчатые колеса 17 и 18,генератор 19 волн, который, вращаясь, деформирует гибкое колесо 2, приводящее во вращение жесткое колесо 13.
Ю При этом получает вращение связан-
203035
25
4045 5055
ное с жестким колесом 12 выходное звено 14 вокруг вала 11 на подшипниковых опорах 15 и 16. Из-за конструктивных ограничений выходное звено 14 не может совершать полный оборот, поэтому оно реализует только качание на угол до 300° относительно оси вала 11.
Для осуществления ротации выходного звена 14 вокруг оси корпуса 1 с выходным валом 3 двигателя 2 соединяется посредством полумуфт 5 и 26 быстроходный вал 25. При этом получает вращение генератора 24 волн, деформирующий гибкое колесо 20, приводящее во вращение жесткое колесо 21, которое вращается на подшипниковых опорах 22 и 23 относительно корпуса 1. Жесткое колесо 21 через вал 11 приводит во вращение выходное звено 14.
Ротационное и качательное движения выходного звена 14 могут быть реализованы или одновременно, или поочередно . I
Формула изобретения
Модуль промышленного робота, содержащий корпус и выходное звено с приводом качания и ротации, вкJBoчaю- щим двигатель, установленный в корпусе, два быстроходных вала и две волновые передачи, одна из которых включает коническую передачу, расположенную внутри гибкого колеса, о т- личающийся тем, что, с целью повьш ения грузоподъемности и точности позиционирования, он снаб- йен двумя управляющими электромагнитными муфтами, установленными с возможностью поочередного или одновременного соединения выходного вала с быстроходными валами, установленными коаксиально, причем на наружном быстроходном валу установлен генератор волн первой волновой передачи, а его жесткое колесо связано с валом второй волновой передачи, уста31294600 ... 4
новленным- перпендикулярно валу пер- дачи с генератором волн второй вол- вой волновой передачи, при этом новой передачи, а жесткое колесо внутренний быстроходньй вал связан последней связано с выходным зве- посредством конической зубчатой пере-. ном.
35 J W 22 г5 20 fj 2i 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Модуль манипулятора | 1986 |
|
SU1360979A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Рука робота | 1991 |
|
SU1757877A1 |
| Модуль манипулятора | 1986 |
|
SU1433790A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Волновой привод | 1990 |
|
SU1728554A1 |
Изобретение относится к области машиностроения и может быть использовано в робототехнике. Целью изобретения является повьшение грузоподъемности и точности позиционирования промышленного робота за счет уменьшения массы модуля и уменьшения числа обычных зубчатЬк передач. Модуль промышленного робота включает корпус, в котором установлен двигатель. Выходной вал последнего посредством управляющих электромагнитных муфт поочередно или одновременно соединяется с быстроходными коаксиальными валами. На быстроходном валу установлен генератор волн первой волновой передачи, а быстроходньй вал посредством конической переда и связан с генератором волн второй волновой передачи. При этом жесткое колесо первой волновой передачи жестко связано с валом второй волновой передачи, а жесткое колесо этой передачи связано с выходньм звеном. Таким образом, первая волновая передача обеспечивает ротацио (вращение) вы- ходкого звена, а вторая - его качание. 2 ил. g СЛ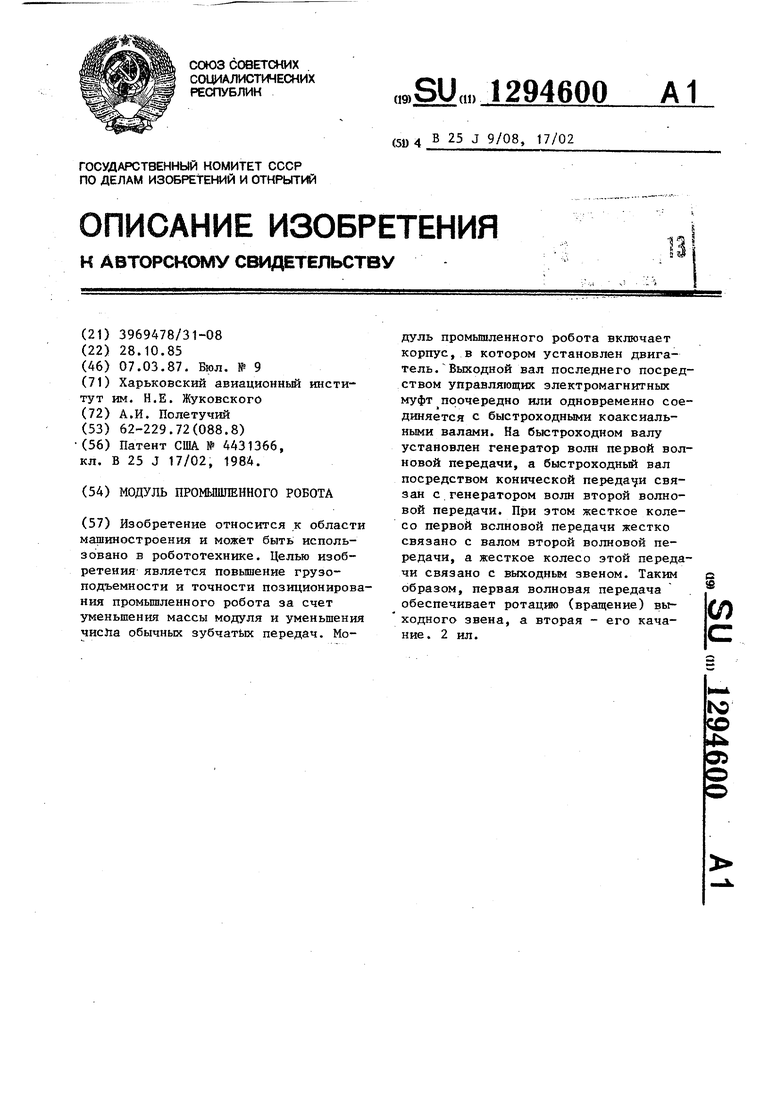
Редактор Н.Тупица
Составитель А.Ширяева Техред Л.Сердюкова
Заказ 430/15 Тираж 954 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
х
Фиг.2
Корректор Е.Рошко
| Патент США № 4431366, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
