(54) КИСТЬ МЕХАНИЧЕСКОЙ РУКИ ПРОМЫШЛЕННОГО
РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Промышленный робот | 1988 |
|
SU1768380A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Захват | 1981 |
|
SU971646A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
- I
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых, например, для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций, а также в роботах, работающих в экстремальных условиях - зонах радиоактивного излучения, космосе.
Известна кисть механической руки промышленного робота, содержащая захват с приводом перемещения его губок и расположенные в предыдущих звеньях механической руки кинематически связанные между собой приводы качания кисти и ротации захвата и механизм компенсации взаимного влияния приводов 1 .
Использование в известной кисти механической руки промышленного робота в качестве .механизма компенсации взаимовлияния приводов дифференциала и планетарных редукторов значительно снижает надежность промышленного робота из-за сложности выборки люфтов в зубчатых зацеплениях, усложняет конструкцию и увеличивает габариты кисти промышлейного робота.
Целью изобретения является упрощение конструкции и повышение надежности кисти механической руки промышленного робота.
Указанная цель достигается тем, что механизм компенсации взаимного влияния приводов снабжен кулачковым валом, в который встроен с возможностью осевого перемещения, элемент привода ротации захвата, например, червяк, а на поверхности кулачкового вала выполнены винтовой и прямолинейный пазы.
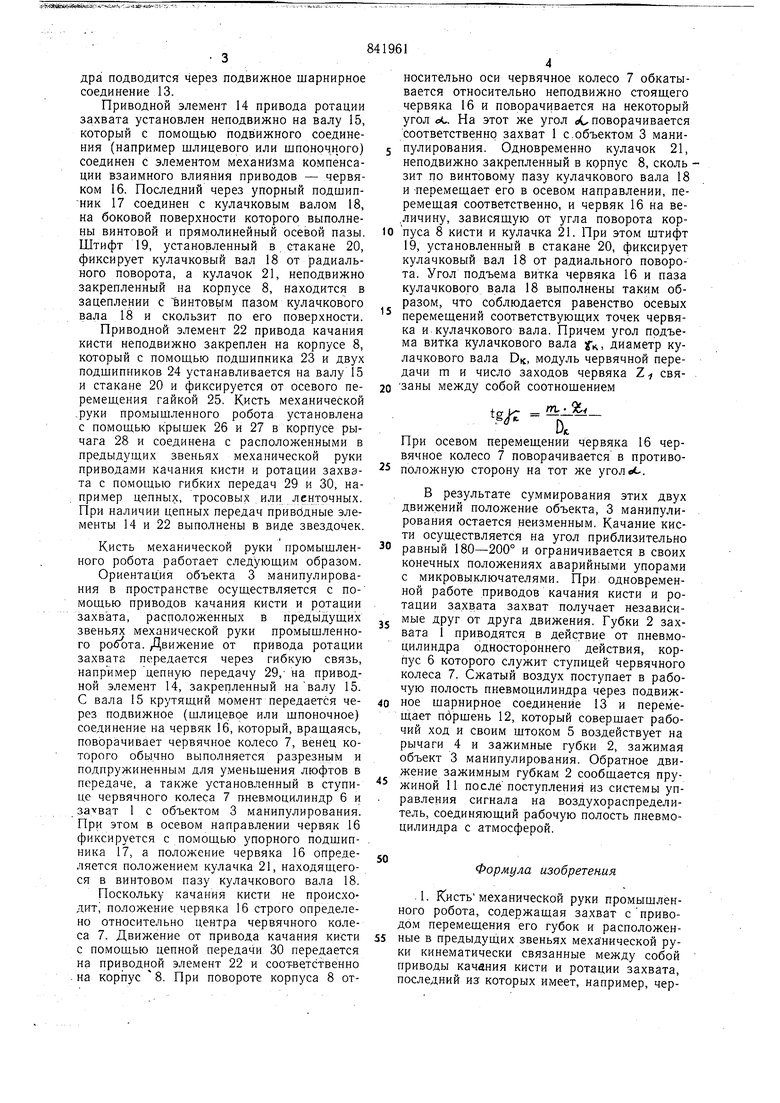
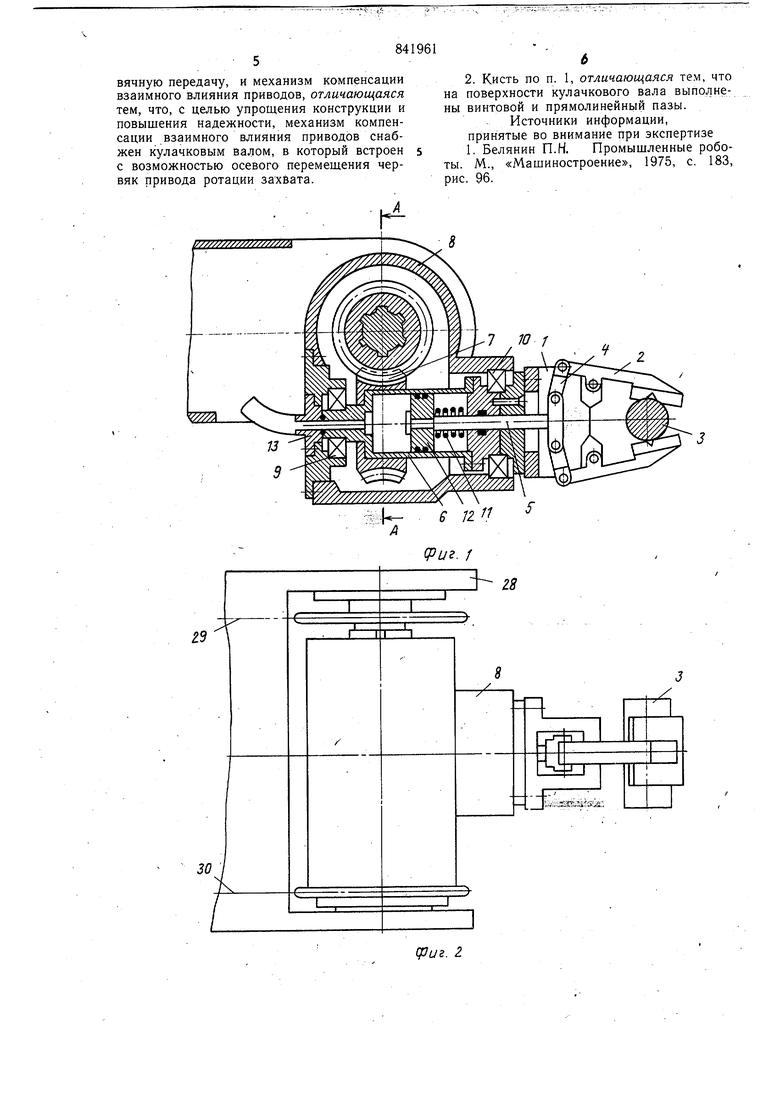
На фиг. 1 изображена кисть механической руки промышленного робота, вид сбоку, разрез; на фиг.2 - то же, вид сверху: на фиг. 3 - разрез А-А на фИг. 1.
Кисть механической руки промыщленного робота состоит из захвата 1, в зажимных губках 2 которого находится объект 3 манипулирования. Зажимные губки 2 черс.ч промежуточнь е рычаги 4 соединены со щтоком 5 привода их перемещения, например пневмоцилиндра одностороннего действия, корпус 6 которого служит ступицей червячного колеса 7, установленного в корпусе 8 кисти на подшипниках 9 и 10. На штоке 5 устгмновлсиа пружина 11 и поршень 2. Сжатый воздух в рабочую полость пневмоцилиндра подводится через подвижное шарнирное соединение 13.
Приводной элемент 14 привода ротации захвата установлен неподвижно на валу 15, который с помощью подвижного соединения (например шлицевого или шпоночцого) соединен с элементом механизма компенсации взаимного влияния приводов - червяком 16. Последний через упорный подшипник 17 соединен с кулачковым валом 18, на боковой поверхности которого выполнены винтовой и прямолинейный осевой пазы. Штифт 19, установленный в стакане 20, фиксирует кулачковый вал 18 от радиального поворота, а кулачок 21, неподвижно закрепленный на корпусе 8, находится в зацеплении с интовьгм пазом кулачкового вала 18 и скользит по его поверхности.
Приводной элемент 22 привода качания кисти неподвижно закреплен на корпусе 8, который с помощью подшипника 23 и двух подшипников 24 устанавливается на валу 15 и стакане 20 и фиксируется от осевого перемещения гайкой 25. Кисть механической ,руки промышленного робота установлена с помощью крыщек 26 и 27 в корпусе рычага 28 и соединена с расположенными в предыдущих звеньях механической руки приводами качания кисти и ротации захвата с помощью гибких передач 29 и 30, например цепных, тросовых или ленточных. При наличии цепных передач приводные элементы 14 и 22 выполнены в виде звездочек.
Кисть механической руки промышленного робота работает следующим образом.
Ориентация объекта 3 манипулирования в пространстве осуществляется с помощью приводов качания кисти и ротации захвата, расположенных в предыдущих звеньях механической руки промыщленного робота. Движение от привода ротации захвата передается через гибкую связь, например цепную передачу 29,- на приводной элемент 14, закрепленный на валу 15. С вала 15 крутящий момент передается через подвижное (шлицевое или шпоночное) соединение на червяк 16, который, вращаясь, поворачивает червячное колесо 7, венец которого обычно выполняется разрезным и подпружиненным для уменьшения люфтов в передаче, а также установ.ленный в ступице червячного колеса 7 пневмоцилиндр 6 и savBaT 1 с объектом 3 манипулирования. При этом в осевом направлении червяк 16 фиксируется с помощью упорного подшипника 17, а положение червяка 16 определяется положением кулачка 21, находящегося в винтовом пазу кулачкового вала 18.
Поскольку качания кисти не происходит положение червяка 16 строго определено относительно центра червячного колеса 7. Движение от привода качания кисти с помощью цепной передачи 30 передается на приводной элемент 22 и соответственно . на корпус 8. При повороте корпуса 8 относительно оси червячное колесо 7 обкатывается относительно неподвижно стоящего червяка 16 и поворачивается на некоторый угол оС. На этот же угол (С поворачивается соответственно захват 1 с,объектом 3 манипулирования. Одновременно кулачок 21, неподвижно закрепленный в корпус 8, сколь зит по винтовому пазу кулачкового вала 18 и -перемещает его в осевом направлении, перемещая соответственно, и червяк 16 на ве,личину, зависящую от угла поворота корпуса 8 кисти и кулачка 21. При этом штифт 19, установленный в стакане 20, фиксирует кулачковый вал 18 от радиального поворота. Угол подъема витка червяка 16 и паза кулачкового вала 18 выполнены таким образом, что соблюдается равенство осевых перемещений соответствующих точек червяка и кулачкового вала. Причем угол подъема витка кулачкового вала Ук., диаметр кулачкового вала D, модуль червячной передачи m и число заходов червяка Z связаны между собой соотношением
to-K Zb
D.
При осевом перемещении червяка 16 червячное колесо 7 поворачивается в противоположную сторону на тот же уголвС.
В результате суммирования этих двух движений положение объекта, 3 манипулирования остается неизменным. Качание кисти осуществляется на угол приблизительно равный 180-200° и ограничивается в своих конечных положениях аварийными упорами с микровыключателями. При одновременной работе приводов качания кисти и ротации захвата захват получает независимые друг от друга движения. Губки 2 захвата 1 приводятся в действие от пневмоцилиндра одностороннего действия, корпус 6 которого служит ступицей червячного колеса 7. Сжатый воздух поступает в рабочую полость пневмоцилиндра через подвижное шарнирное соедицение 13 и перемещает пбршень 12, который совершает рабочий ход и своим штоком 5 воздействует на рычаги 4 и зажимные губки 2, зажимая объект 3 манипулирования. Обратное движение зажимным губкам 2 сообщается пружиной 11 послепоступления из системы управления сигнала на воздухораспределитель, соединяющий рабочую полость пневмоцилиндра с атмосферой.
Формула изобретения
Л. Кистьмеханической руки промыщленного робота, содержащая захват сприводом перемещения его губок и расположенные в предыдущих звеньях механической руки кинематически связанные между собой приводы качания кисти и ротации захвата, последний из которых имеет, например, червячную передачу, и механизм компенсации взаимного влияния приводов, отличающаяся тем, что, с целью упрощения конструкции и повышения надежности, механизм компенсации взаимного влияния приводов снабжен кулачковым валом, в который встроен с возможностью осевого перемещения червяк привода ротации захвата. ;: : %;%% % r af 7
Источники информации, принятые во внимание при экспертизе 1. Белянин П.Н, Промышленные роботы. М., «Машиностроение, 1975, с. 183, рис. 96. ., ЦП
Сриг. /
- Z8
I г
Т1
J, tax-vs-k-.
Сриг. 1
А-А
23
21 22
8
фиг. 3
