Изобретение относится к измерительной технике и может найти применение в робототехнике для измерения и контроля параметров кинематического движения объекта.
Известен магнитострикционный преобразователь перемещений, содержащий маг- нитострикционныйзвукопровод,
неподвижную катушку возбуждения, подвижную приемную катушку, неподвижную опорную катушку считывания, два демпфера, три постоянных магнита, тактовый генератор, формирователь импульсов записи, усилитель-формирователь импульсов считывания, триггер, генератор образцовой частоты, дополнительный триггер, две схемы совпадения, реверсивный счетчик, опорный усилитель-формирователь импульсов считывания, счетный триггер, схему совпадения, счетчик импульсов, измеритель отношения временных интервалов.
Известен магнитострикционный преобразователь перемещений, содержащий од- новибратор, усилитель записи, элемент записи с подмагничиванием, магнитострикционный звукопровод, элемент считывания с подмагничиванием, предусилитель и усилитель-формирователь, триггер и генератор, стабилизатор напряжения коммутатор, четыре регистра, блок АРУ, компаратор, делитель, элемент задержки.
Основным недостатком известных устройств является недостаточная устойчивость к электромагнитным импульсным помехам, проявляющихся через взаимоиндукцию сигнальных цепей и внешних электромагнитных полей. Мощность наводимой помехи может превышать уровень полезного сигнала и вызывать нарушение работы преобразователя, что требует использование экранирования сигнальных цепей, ведущее к его усложнению.
(Л
С
ч ел
00
Ю 00
Цель изобретения - повышение помехоустойчивости преобразования линейных перемещений в время-импульсный сигнал.
Поставленная цель достигается тем, что в магнитострикционный преобразооатель перемещений, содержащий прямолинейный магнитострикционный звукопровод, на одном конце которого установлен акустический демпфер, распределенный элемент записи, закрепленный вдоль рабочей части звукопровода, с магнитом смещения, предназначенный для кинематической связи с объектом перемещения, сосредоточенный элемент считывания с магнитом смещения, неподвижно закрепленный на звукопрово- де между акустическим демпфером и распределенным элементом записи, дополнительно введены второй акустический демпфер, установленный на другом конце звукопровода, второй сосредоточенный элемент считывания с магнитом смещения, закрепленный на звукопроводе между распределенным элементом записи и вторым демпфером и соединенный встречно-последовательно с первым сосредоточенным элементом считывания.
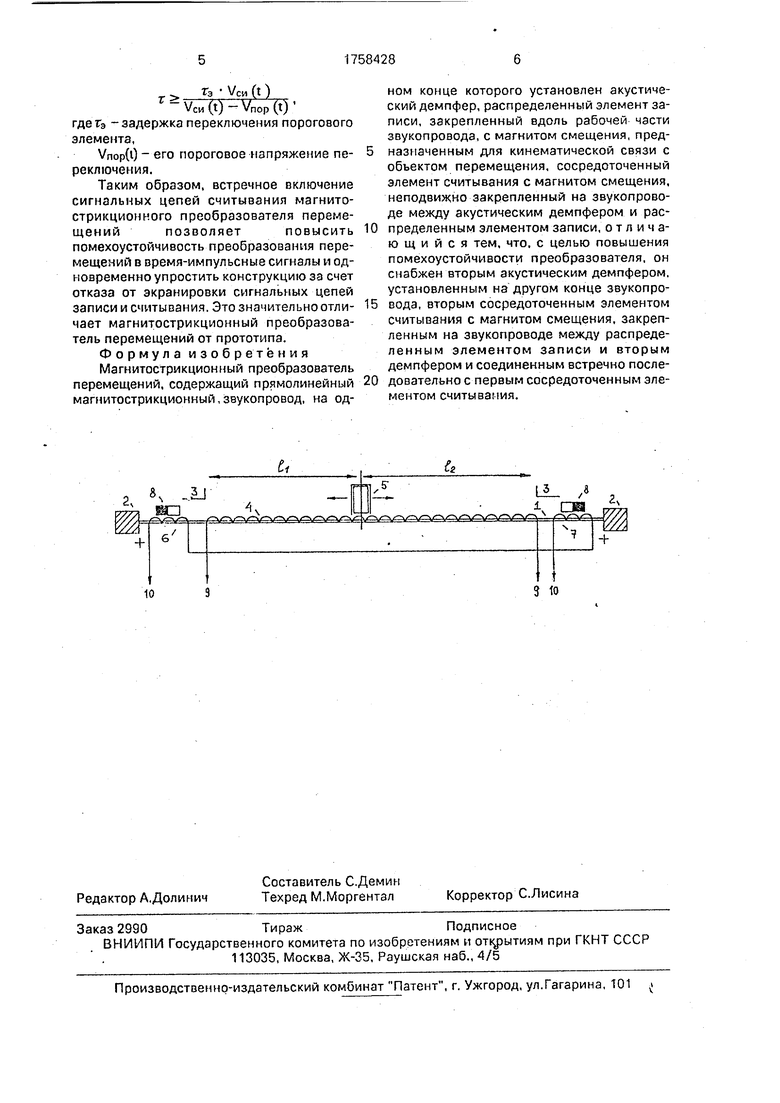
На чертеже приведена структурная схема магнитострикциоиного преобразователя перемещений, выполненная с неконтактным съемом измерительной информации.
Магнитострикционный преобразователь перемещений, содержит прямолинейный магнитострикционный звукопровод 1, два акустических демпфера 2 и ограничителя 3 перемещений, распределенный элемент 4 записи с подвижным магнитом 5 смещения, два сосредоточенных элемента 6, 7 считывания с магнитами 8 смещения. Магнитострикционный звукопровод 1 установлен в кустические демпферы 2, вблизи которых неподвижно закреплены на звукопроводе 1 первый и второй сосредоточенные элементы б и 7 считывания с магнитами 8 смещения, включенные между собой встречно-последовательно. Между сосредоточенными элементами G, 7 считывания на звукопроводе 1 неподвижно закреплен распределенный элемент 4 записи с подвижным магнитом 5 смещения, который кинематически подключен к объекту и может перемещаться между ограничителями 3 перемещений, установленные по краям распределенного элемента 4 записи.
Магнитострикционный преобразооатель перемещений работает следующим образом.
При подаче токового сигнала записи Ix(ti) на выводы 9 распределенного элемента 4 записи под подвижным магнитом 5 смещения в среде магнитострикциоиного
заукопровода 1 возбуждается продольная упругая волна ax(t) вследствие магнитоме- ханического преобразования, которая начинает распространяться в обе стороны с
фазовой скоростью Vnp, В момент возбуждения на выводах сосредоточенных элементов 6, 7 считывания будут наведены сигналы помехи из-за взаимоиндуктивпого эффекта, если цепи записи и считывания преобразователя не экранированы или недостаточно экранированы, равные:
enoM.l(tl)M1.lx(tl),(1)
enoM.2(tij M2.lx(ti),(2)
где Mi М2 - взаимоиндукция коаксиально
расположенных сосредоточенных элементов 6, 7 считывания.
Упругие волны 7i(t) и ог(т), распространяясь по звукопроводу 1 в стороны первого и второго сосредоточенных элементов 6. 7
считывания достигают их и ими считываются вследствие магнитоупругого преобразования и через искомые интервалы времени Ti li/VnpnT2 l2/Vnp.(3)
пропорциональные искомым расстояниям
И, 2 между подвижным магнитом 5 смещения и сосредоточенными элементами 6, 7 считывания. На выводах первого и второго сосредоточенных элементов 6, 7 считывания наводятся аналоговые сигналы считывакия
Ex.i(t) епом.1(и) + ex.i(Ti).(4)
Ex.2(t) en0M.2(ti) -i- ex.2(T2),(5)
где ex.t, ex.2 - информационные сигналы считывания.
Поскольку влияния взаимоиндуктивно- го эффекта (1), (2) электромагнитных помех могут вызывать значительные искажения формы информационных сигналов считывания (магнитострикционной шкалы) и нару- шать режим работы магнитострикционного преобразователя перемещений, встречное включение первого и второго сосредоточенных элементов б, 7 считывания (фиг. 1) позволяет значительно ослабить эти влияния. Эффективность взаимокомпенсации определяется идентичностью электрических и геометрических параметров сосредоточенных элементов 6, 7 считывания, э именно
ASnoM(tl) enoM.l(tl) - enoM.2(tl) 0.(6)
в результате на выводах 10 сосредоточенных элементов 6, 7 считывания формируются неискаженные шумовой составляющей аналоговые сигналы считывания в моменты считывания (3)
AEx.i(t) ex.i(Ti),(7)
A Ex.2(t) ех.2(Т2),(8)
которые далее усиливаются по напряжению Vcw(t) и преобразуются в прямоугольные видеоимпульсы считывания длительности
т
Тэ
УсиСО Vnop(t)
VCH (t)
гдегэ -задержка переключения порогового элемента,
Vnop(i) - его пороговое напряжение пе- реключеиия.
Таким образом, встречное включение сигнальных цепей считывания магнито- стрикционн.ого преобразователя перемещенийпозволяетповыситьпомехоустойчивость преобразования перемещений в время-импульсные сигналы и одновременно упростить конструкцию зз счет отказа от экранировки сигнальных цепей записи и считывания. Это значительноотли- чает магнитострикционный преобразователь перемещений от прототипа.
Формула изобретения
Магнитострикционный преобразователь перемещений, содержащий прямолинейный магнитострикционный,звукопровод, на одном конце которого установлен акустический демпфер, распределенный элемент записи, закрепленный вдоль рабочей части звукопровода, с магнитом смещения, предназначенным для кинематической связи с объектом перемещения, сосредоточенный элемент считывания с магнитом смещения, неподвижно закрепленный на звукопрово- де между акустическим демпфером и распределенным элементом записи, отличающийся тем, что. с целью повышения помехоустойчивости преобразователя, он снабжен вторым акустическим демпфером, установленным на другом конце звукопровода, вторым сосредоточенным элементом считывания с магнитом смещения, закрепленным на звукопроводе между распределенным элементом записи и вторым демпфером и соединенным встречно последовательно с первым сосредоточенным элементом считывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1758429A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1620834A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА НАКЛОНА | 1991 |
|
RU2075728C1 |
| Ультразвуковой преобразователь перемещений | 1989 |
|
SU1765690A1 |
| Ультразвуковое устройство для измерения линейных перемещений | 1989 |
|
SU1640546A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1679187A1 |
| Магнитострикционный преобразователь линейных перемещений | 1990 |
|
SU1742618A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
Изобретение относится к измерительной технике, а именно ультразвуковым измерительным преобразователям и может быть использовано в робототехнических системах и комплексах для измерения параметров линейного перемещения объекта. Целью изобретения является повышение помехоустойчивости за счет взаимокомпенсации электромагнитной наводки в сигналь- ных цепях считывания. Применение дополнительного сосредоточенного элемента считывания, установленного на маг- нитострикционном звукопроводе по другую сторону распределенного элемента записи, и его встречно-последовательное включе- .ние с основным сосредоточенным элементом считывания повышает устойчивость магнитострикционного преобразователя к влияниям наводимых электромагнитных помех без усложнения конструкции вторичного преобразователя. 1 ил.
10
3 10
| Магнитострикционный дифференциальный преобразователь перемещений | 1980 |
|
SU956964A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
