Изобретение относится к измерительной технике и может быть использовано в робототехнических системах и комплексах для автоматизированного измерения перемещения, скорости и ускорения.
Целью изобретения является расширение области применения за счет измерения скорости и ускорения контролируемого объекта. .
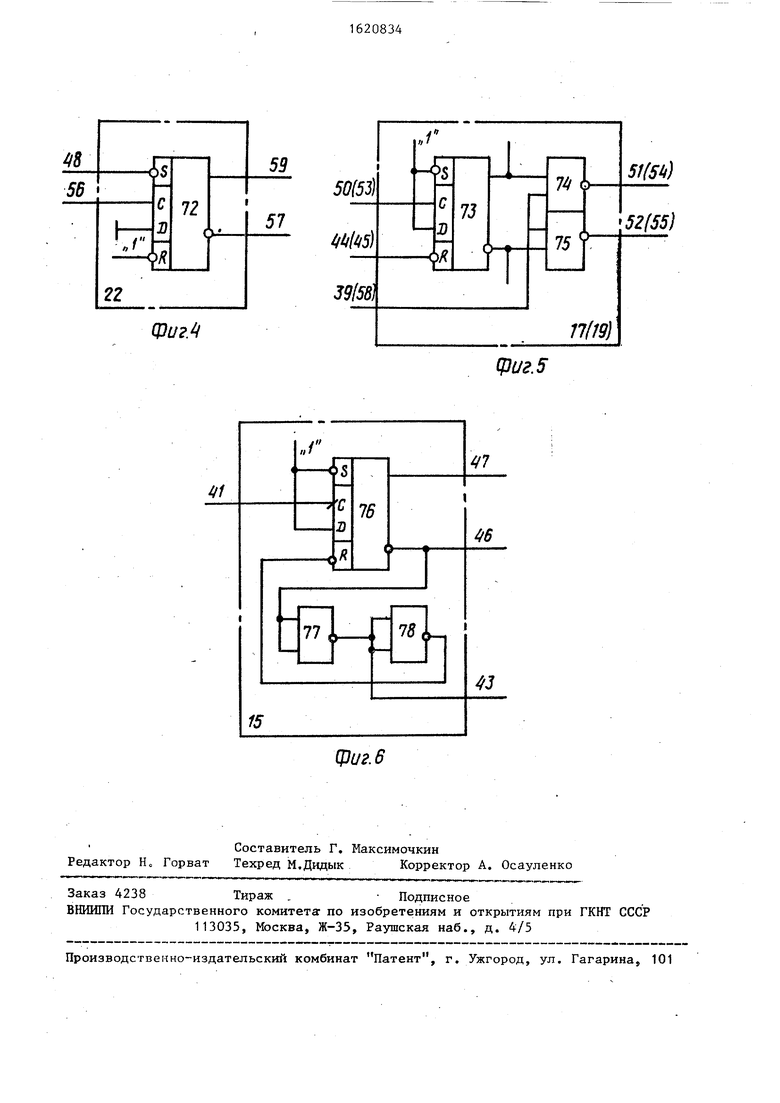
На фиг. 1 приведена блок-схема ультразвукового измерителя перемещений; на фиг. 2 - вариант выполнения магнитострикционного преобразователя линейных перемещений; на фиг. 3 и 4 - примеры выполнения первой и второй схем управления; на фиг. 5 - выполнение схемы реверсирования; на фиг. 6 вариант выполнения формирователя импульсов.
Ультразвуковой измеритель перемещений содержит магнитострикционный преобразователь 1 линейных перемещений, состоящий из проволочного (ленточного) звукопровода 2, акустических демпферов 3 и 4, установленных соответственно на первом и втором концах звукопровода 2, стабилизатора 5 растягивающих усилий, подвижного элемента 6 записи с магнитом 7 смещения, предназначенного для связи с объектом перемещения, неподвижного элемента 8 считывания с магнитом 9 смещения, усилителя 10 записи и усилителя-формирователя 11 считывания, подключенных соответственно к
ю
оо
СО
выводам элементов записи и считывания 6 и 8, первую схему 12 управления, измерительный генератор 13, генератор 14 опроса, первый формирователь 15 импульсов, первый блок 16 накопления и схему 17 реверсирования, вторые блок 18 накопления и схему 19 реверсирования, третий блок 20 накопления, четвертьй блок 21 накопления, вторую схему 22 управления, вспомогательный генератор 23, второй формирователь 24 импульсов, первьй, второй и третий буферные регистры 25 - 27, элемент 28 задержки, шину 29 управления, ши- ну 30 запуска, шину 31 запроса, п шин
32результата по перемещению, m шин
33результата по скорости, m шин 34 результата по ускорению и шину 35 синхронизации. Кроме того, измеритель перемещений содержит ограничители 36
и 37 перемещений о
Первый выход 38 первой схемы 12 управления через измерительный генератор 13 подключен к синхровходу 39 первой схемы 17 реверсирования и прямому счетному входу первого блока 16 накопления, а второй выход 40 через генератор 14 опроса подключен к входу 41 первого формирователя 15 импульсов и входу 42 первой схемы 12 управления Выход 43 формирователя 15 соединен с нулевыми входами 44 и 45 первой и т- второй схем 17 и 19 реверсирования, второй выход 46 соединен с синхровхо- дами первогоэ второго и третьего блоков 16, 18 и 20 накопления, а третий выход 47 через усилитель 10 записи подсоединен к выводу элемента 6 записи. Элемент 6 записи закреплен на прямолинейном звукопроводе 2 с возможностью перемещения между ограничителя ми 36 и 37 перемещений, установленными по его концам и задающими кинематический диапазон перемещения. На од- ном конце звукопровода 2 закреплен неподвижный элемент 8 считывания, подключенный через усилитель-формирователь 11 к первому входу 46 первой схемы 12 управления. Второй и третий
ее входы подключены соответственно к шине 29 управления и шине 30 запуска. Третий выход 47 первой схемы 12 упра вления соединен с синхровходом чет- вертого блока 21 накопления и единичным входом 48 второй схемы 22 управ ления, а четвертый выход 49 подключен к шине 31 запроса. Выходы первого блока 16 накопления соединены с ин;
Q f5
20
25-JQ -45
35
50
ss
формационными входами второго блока
18накопления и первого буферного регистра 25, выходы второго блока 18 накопления соединены с информационными входами третьего и четвертого блоков 20, 21 накопления и второго буферного регистра 26, а выходы третьего блбка 20 накопления соединены с информационными входами третьего буферного регистра 27. Выходы регистров
25 - 27 подключены соответственно к шинам 32 - 34 результата по положению (перемещению) скорости и ускорению. Выход переноса второго блока 18 накопления соединен с управляющим входом 50 пер,вой схемы 17 реверсирования, выходы 51 и 52 последней соединены с прямым и обратным -счетными входами блока 18 накопления. Выход переноса третьего блока 20 накопления соединен с управляющим входом 53 второй схемы
19реверсирования, выходы 54 и 55 последней соединены с прямым.и обратным счетным входами блока 20 накопления. Выход переноса четвертого блока 21 накопления соединен с синхровходом 56 второй схемы 22 управления. Ее выход 57 через вспомогательный генератор 23 подключен к синхровходу 58 второй схемы 19 реверсирования и инверсному счетному входу блока 21 накопления,
а другой выход 59 через второй форми рователь 24 импульсов соединен с син- хровходами буферных регистров 25 - 27 и входом элемента 28 задержки, выход которого подключен к шине 35 синхронизации.
Кроме того, первичньй магнитострик- ционный преобразователь 1 линейных перемещений измерителя может быть выполнен по неконтактной кинематической схеме (фиг. 2) на основе стержневого (трубчатого) прямолинейного звукопровода 2 из магнитострикционного материала с монолитным акустическим демпфером 60, сигнального пьезоэлектрического преобразователя 61 и распределенного элемента 62 считывания с подвижным элементом 63 подмагничивания. По концам звукапровода установлены ограничители перемещений 36 и 37, между .
) которыми перемещается элемент 63 под,- магничивания, кинематически связанный с объектом перемещения. На противоположной стороне звукопровода 2 от акус тического демпфера 60 на торцовой ча сти закреплен пьезоэлектрический преобразователь 61, выводы которого соединены с выходом усилителя 10 записи По всей длине звукопровода размещен распределенный элемент 62 считывания выводы которого соединены с входом усилителя-формирователя 11 считывания.
Схема 12 управления (фиг. 3) може быть выполнена из логических элементов 64 - 66 и триггеров 67-71.
Вторая схема 22 управления может быть выполнена в виде триггера 72 (фиг„ 4).
Схемы 17 и 19 реверсирования могу быть выполнены из триггера 73 и двух логических элементов 74 и 75 (фиг. 5)
Формирователь 15 импульсов может быть выполнен из триггера 76 и двух логических элементов 77 и 78 (фиг. 6)
Устройство работает следующим образом.
ПервоначалънЬ устройство устанавливается в исходное состояние. На шине 31 запроса выставляется цифрово сигнал Запрос, в ответ на который через время реакции tp пользователь выставляет по шине 30 запуска цифровой импульсный сигнал Запуск. Устройство переводится в режим измерени параметров движения контролируемого объекта в случае присутствия на шине 29 управления цифрового сигнала Разрешение. В противном случае запуск устройства не производится (фиг 1, фиг. 3).
Производится запуск генератора 14 опроса и возбуждение первого формирователя 15 импульсов, по сигналам которого (фиг. 6) происходит обнуление первой и второй схем 17 и 19 реверсирования (фиг. 5), запись нулевой (исходной) информации в последовательно соединенные первый, второй и третий блоки 16, 18, 20 накопления и возбуждение сигнального усилителя 10 записи первичного магнитострикци- онного преобразователя 1. Одновременно осуществляется запуск измерительного генератора 13, вырабатывающего последовательность счетных импульсов с частотой следования Х - 1/Т0, которые с этого момента проходят на прямой .счетный вход первого блока 16 накопления.
На выходе усилителя 10 записи в следующий момент формируется токовьй сигнал записи, который проходит на вход подвижного элемента 6 записи и возбуждает под ним в звукопроводе 2
магнитоупругую волну вследствие маг нитомехянического преобразования. Возбужденная волна распространяется влево и вправо по звукопроводу с фазовой скоростью V и в некоторый момент достигает акустический демпфер 4 и рассеивается.
Волна, распространяющаяся влево, через искомое время перемещения .} объекта.
Х,1
1м
V
О)
15
достигает неподвижный элемент 8 считывания и наводит на его выводах импульс напряжения считывания, который, поступая в усилитель-формирователь 11 считывания, усиливается и преобразуется в прямоугольный видеоимпульс. Этот импульс считывания проходит на вход 46 первой схемы 12 управления, что приводит к выключению (останову) измерительного генератора 13. В результате на выходах первого блока 16 накопления формируется n-разрядный код текущего положения объекта, равный
30
N
х.1
Х
l,i
v
(2)
Затем магнитоупругая волна достигает левый акустический демпфер 3 и рассеивается. Тем самым образование в звукопроводе 2 вторичных волн, которые
образуют в данном случае акустическую помеху, снижающую полезньй уровень сигнала в акустическом тракте первичного преобразователя 1, устраняется. На этом заканчивается первый такт
работы устройства.
Второй такт начинается по сигналу генератора 14 опроса, который вырабатывает последовательность импульсов с периодом следования Т., определяющий диапазон измерения параметров движения объекта. По его сигналу производится возбуждение первого формирователя 15 импульсов, что приводит к уста- . новке первой схемы 17 реверсирования в режим перезаписи сформированной информации (2) с первого блока 16 во второй блок 18 накопления и к запуску усилителя 10 записи. Одновременно осуществляется запуск измерительного ге
нератора 13 по сигналу схемы 12 управления (фиг, 3).
Генератор 13 запускается на время прохождения магнитоупругой волной аку-,- стического тракта искомой длины
упругой волной акустического тракта искомой длины 1,
х.Э
х.з
I у.З
V
(7)
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель параметров движения | 1988 |
|
SU1534308A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| Устройство для измерения линейных перемещений | 1987 |
|
SU1515041A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| Устройство для измерения перемещений | 1990 |
|
SU1758429A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2100775C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |

Изобретение относится к измерительной технике и может быть использовано в робототехнических системах и комплексах для автоматизированного нзмерения перемещения, скорости и ускорения. Целью изобретения является расширение области применения за счет измерения скорости и ускорения контролируемого объекта. В измерителе с помощью магнитострикционного преобразователя линейных перемещений и схемы обработки данных осуществляется последовательное измерение перемещения, скорости и ускорения подвижного элемента записи, кинематически связанного с контролируемым объектом перемещения. Искомые параметры формируются с помощью двух схем реверсирования и трех блоков накопления, связанных с соответствующими буферными регистрами для вывода результатов измерения. 1 з.п« ф-лы, 6 ил. SS
U
х,2 v
(3)
За это время на выходах первого блока 16 накопления формируется код текущего значения, равный
NX.rfoA.2 N Т.г- 1
Of
-у Л0
(4)
Одновременно счетные импульсы измерительного генератора 13 проходят че- 20 рез схему 17 реверсирования на инверсный счетный вход второго блока 18 накопления и формируют на его выходах т-разрядный код
25
NX.CK. /НХ.пол.Ј ых,поЛ.1/ (
который несет информацию о текущем значении скорости перемещения объекта
v - ML - flx- X.J . (л) v.i - T1 ч т1 ( }
Вычисление выражения (5) осуществляется схемой 17 реверсирования, которая управляет направлением счета по сигналу переноса блока 18 накопления. На этом завершается второй такт работы устройства. В блоках 16 и 18 накопления зафиксирована информация о текущем положении (4) и скорости (5) перемещения объекта.
Третий такт работы начинается по сигналу генератора 14 опроса. Здесь по сигналам формирователя 15 производится перевод второй и первой схем 19 и 17 реверсирования в режим реверсированного счета, осуществляется последовательно-параллельная запись кода скорости (5) в третий блок 20 накопления, перезапись кода положения (4) во второй блок 18 накопления, запись нулевой информации (N 0...00) в первый блок 16 накопления, возбуждение усилителя 10 записи и запуск измерительного генератора 13.
Измерительный генератор 13 запускается на время прохождения магнито10
за которое на выходах первого блока 16 накопления формируется код текущего положения, равный
N..3 Ni TX.V о
v
Ixjjt ,/v
тт Л О
(8)
За время на выходах второго, блока 18 накопления формируется текущий код скорости
N N /1к 3 Ь.г/ , fy
.ск,22.Т1Л°
,2 ,/v
Л г .
Т1 ° }
(9)
которьй соответствует скорости переме щения объекта
30
4k /1х.з - ix.a/ ( ух.г т1Т1
Ю)
Вычисление выражения (9) осуществляет -1
ся схемой 19 реверсирования, работающей аналогично схеме 17.
В конде третьего такта работы устройства текущее значение кода скоро-
сти (9) по сигналу первой схемы 12 управления (фиг. 3) заносится в четвертый блок 21 накопления. Но этому же сигналу схемы 12 управления осущест- /вляется переключение в единичное со-
стояние второй схемы 22 управления (фиг. 4), по сигналу которой запускается генератор 23, формирующий на своем выходе счетные импульсы с частотой следования не более „
Счетные импульсы генератора 23 проходят на инверсный счетный вход четвертого блока 21 накопления, производя вычисление нулевого значения сиг- нала (N 0...00), при котором на его выходе переноса формируется сигнал, переключающий в исходное состояние схему 22 управления. Эти же сигналы генератора 23 проходят на один из счетных входов третьего блока 20 на
копления, формируя в конце третьего такта работы m-разрядный код ускорения
NK.LJCK N3
ск.г Nxc,i/ (11
К что соответствует ускорению объекта
Х.ск.г
- V
Х.СК
.1/
/А12 - Т1
Градиент ускорения объекта формируется на выходах второй схемы 19 реверсирования в виде импульсных или потенциальных сигналов (фиг. 5),
В результате на информационных входах выходных буферных регистров 27 в конце цикла преобразования получают коды положения (8), скорости (9) и ускорения (11) объекта. Запись N( N4, N2. N$-, N3 N6 в регистры производится по сигналу второй схемы 22 управления. С выходов регистров 25, 26 и 27 цифровые сигналы, соответственно, Код положения, Код скорости и Код ускорения проходят в выходные шины 32 - 34 результата по положению, скорости и ускорению. В следующий момент сигнал формирователя 24 импульсов, задержанный на время элементом 28 задержки, проходит в шину 35 синхронизации, формируя цифровой импульсный сигнал Синхронизация. По шине 31 запроса схема 12 управления выставляет сигнал За -
прос , означающий конец цикла преобразования и готовность устройства к очередному преобразованию.
Стабилизация волнового сопротивления звукопровода 2 и повышение его жесткости достигается за счет использования стабилизатора 5 растягивающих усилий. Это способствует повышению точности и стабильности работы устройства. Его разрешающая способность определяется частотой дискретизации интервала Т„ перемещения, вырабатываемая генератором 13, которая может быть увеличена при использовании многофазного генератора.
Для повышения помехоустойчивости устройства магнитоупругий сигнал акустического тракта может быть промо- дулирован высокой частотой. Ограничители перемещений 36 и 37 задают кинематический диапазон перемещения
10
15
40
дг20834ш
элемента 6 записи и предохраняют элементы преобразователя 1 от механических повреждений в процессе работы устройства .
Кроме того, ультразвуковой измеритель перемещений может быть выполнен по неконтактной кинематической схеме с использованием стержневого (трубочного) звукопровода с монолитным акустическим демпфером 60 (фиг. 2), с распределенным по всей его длине элементом 62 считывания и сосредоточенным подвижным элементом 63 подмагни- чивания. На торцовой стороне волновода от демпфера закреплен пьезоэлектрический преобразователь 61, с помощью которого производят возбуждение магнитоупругой волны в звукопроводе 2. Элемент 63 подмагничивания кинематически подключают к объекту контроля. Он перемещается вдоль звукопро- вода 2 в пределах распределенного элемента 62 считывания между ограничителями 36 и 37. Работа измерителя перемещений в этом случае не отличается от описанного.
Повышение информативности измерителя относительно прототипа достигается за счет автоматического вычисления параметров движения объекта при минимальном времени преобразования и возможности задавать диапазон измерения в широких пределах путем установки соответствующего значения парамет- pa 1 генератора 14. Развитый приборный интерфейс устройства позволяет использовать его в составе вычислительного комплекса работотехнической системы. Достоинство устройства заключается в простой схемотехнической организации первичного и встроенного каналов обработки информации, который может быть использован практически для любой кинематической схемы преобразователя линейных перемещений.
20
25
30
Формула изобретения
да и предназначенного для кинематического соединения с контролируемым объектом перемещения, усилителя записи и усилителя-формирователя считывания, ( подключенных к выводам соответственно -элементов записи и считывания, измери- тацьный генератор, подключенные к его выходу схему реверсирования и блок
20
накопленная, и последовательно соеди- JQ нёиныёСйенератор опроса и формирова-
йшульсов, два выхода которого соединены соответственно с входами схемыреверсирования и блока накопления отличающийся тем, jr что, с целью расширения области применения за счет измерения скорости и ускорения контролируемого объекта, магнитострикционный преобразователь перемещений снабжен стабилизатором растягивающих усилий, ограничителями перемещений, установленными на концах звукопровода, первой и второй схемами управления, второй схемой реверсирования, вторым, третьим и четвертым бло- 25 ками накопления, вспомогательным генератором, вторым формирователем импульсов s тремя буферными регистрами и элементом задержки, выход которого подключен к шине синхронизации, а входзд объединен с синхровходами первого, второго и третьего буферных регистров и подключен к выходу второго формирователя импульсов, вход последнего
подключен к выходу второй схемы управ-.
ления, второй выход которой подключен через вспомогательный генератор к инверсному счетному входу четвертого блока накопления и синхровходу второй схемы реверсирования, выходы послед- ней соединены соответственно с прямым и инверсным счетными входами третьего блока накопления, выход переноса которого соединен с информационным входом второй схемы реверсирования, нулевой вход последней объединен с нулевым входом первой схемы реверсирования, выходы последней соединены соответственно с прямым и инверсным счетными входами второго блока накопления, вы- ход переноса которого соединен с информационным входом первой схемы реверсирования, синхровходы второго и третьего блоков накопления объединены и подключены к второму выходу первого
(
0
JQ
r 5зд
.
35
«Q ,с п - ния;
формирователя импульсов, первый, второй и третий блоки накопления включены последовательно, выходы первого блока накопления через первый буферный регистр подключены к шине результата по положению, выходы второго блока накопления соединены с информационными входами четвертого блока накопления и через второй буферный регистр подключены к шине результата по скорости, выходы третьего блока накопления через третий буферный регистр под- подключены к шине результата по ускорению, выход переноса четвертого блока накопления соединен с синхровходом второй схемы управления, единичньй вход последней объединен с синхровходом четвертого блока накопления и подключен к третьему выходу первой схемы управления, ее первый и второй выходы соединены соответственно с входами измерительного генератора и генератора опроса, выход которого соединен с первым входом первой схемы управления, четвертый выход последней подключен к шине запроса, первый и второй входы подключены соответственно к шинам управления и запуска, третий вход соединен с выходом усилителя-формирователя считывания, а третий выход первого формирователя импульсов соединен с входом усилителя записи.
I
r-IW
лвмн
55
Г7ED|-3I- Д|-
aLr||rgLr|| 41r rS
12
J5
4rd
0.J
48
is
59
з
72
57
Фиг.4
„/
77
Фиг. 6
фиг. 5
47
о-1
4В
л
| Магнитострикционный преобразователь перемещений | 1980 |
|
SU956965A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
