Ё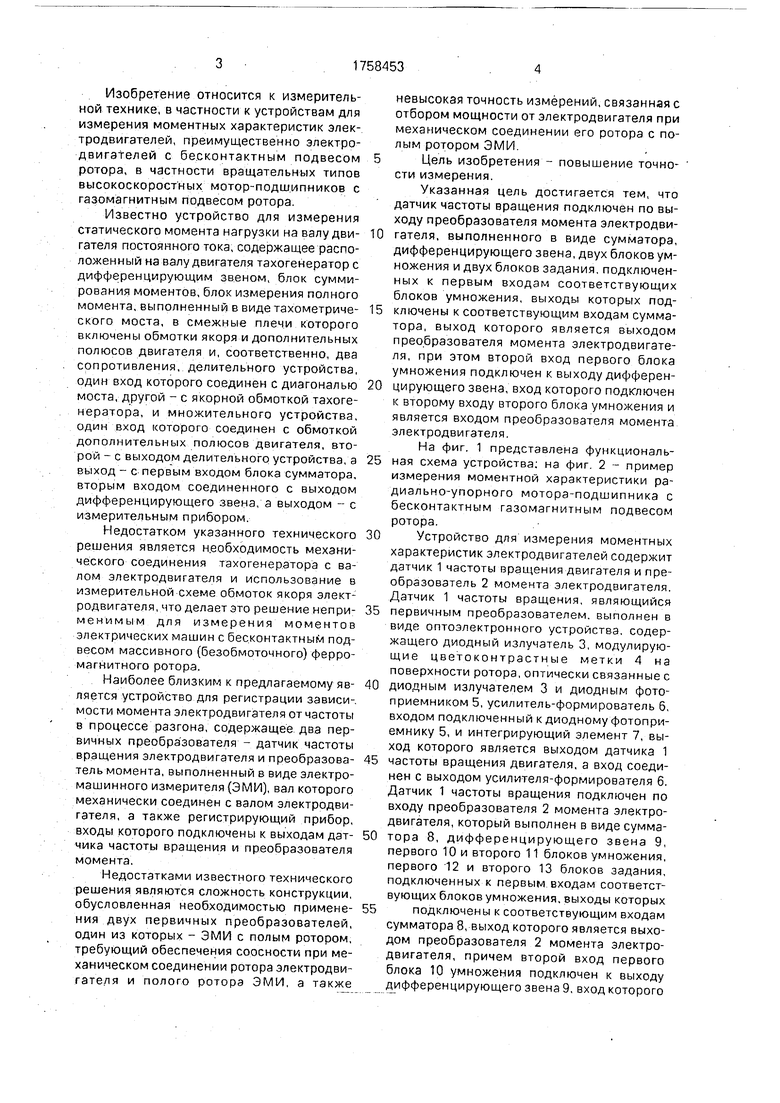
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Электропривод | 1978 |
|
SU782114A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Частотно-управляемый электропривод | 1981 |
|
SU1010714A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| Асинхронный вентильный каскад | 1991 |
|
SU1836801A3 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| Устройство для определения статического момента двигателя постоянного тока | 1981 |
|
SU1010935A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
Сущность изобретения: устройство содержит датчик 1 частоты вращения двигателя, преобразователь 2 момента электродвигателя и двухкоординатный самописец 14, при этом датчик 1 частоты двигателя содержит диодный излучатель 3, модулирующие цвето- контрастные метки 4 по поверхности ротора, диодный фотоприемник 5, усилитель-формирователь б и интегрирующий элемент 7, а преобразователь 2 момента электродвигателя содержит сумматор 8, дифференцирующее звено 9, блоки 10, 11 умножения и блоки 12, 13 задания. 2 ил.
а/2.1
-г
VJ
сл со
сл
СлЭ
Ј
Изобретение относится к измерительной технике, в частности к устройствам для измерения моментных характеристик электродвигателей, преимущественно электродвигателей с бесконтактным подвесом ротора, в частности вращательных типов высокоскоростных мотор-подшипников с газомагнитным подвесом ротора
Известно устройство для измерения статического момента нагрузки на валу двигателя постоянного тока, содержащее расположенный на валу двигателя тахогенератор с дифференцирующим звеном, блок суммирования моментов, блок измерения полного момента, выполненный в видетахометриче- ского моста, в смежные плечи которого включены обмотки якоря и дополнительных полюсов двигателя и, соответственно, два сопротивления, делительного устройства, один вход которого соединен с диагональю моста, другой - с якорной обмоткой тахоге- нератора, и множительного устройства, один вход которого соединен с обмоткой дополнительных полюсов двигателя, второй - с выходом делительного устройства, а выход - с первым входом блока сумматора, вторым входом соединенного с выходом дифференцирующего звена, а выходом - с измерительным прибором.
Недостатком указанного технического решения является необходимость механического соединения тахогенератора с валом электродвигателя и использование в измерительной схеме обмоток якоря электродвигателя, что делает это решение непри- менимым для измерения моментов электрических машин с бесконтактным подвесом массивного (безобмоточного) ферромагнитного ротора.
Наиболее близким к предлагаемому является устройство для регистрации зависимости момента электродвигателя от частоты в процессе разгона, содержащее два первичных преобразователя - датчик частоты вращения электродвигателя и преобразователь момента, выполненный в виде электромашинного измерителя (ЭМИ), вал которого механически соединен с валом электродвигателя, а также регистрирующий прибор, входы которого подключены к выходам датчика частоты вращения и преобразователя момента.
Недостатками известного технического решения являются сложность конструкции, обусловленная необходимостью применения двух первичных преобразователей, один из которых - ЭМИ с полым ротором, требующий обеспечения соосности при механическом соединении ротора электродвигателя и полого ротора ЭМИ, а также
невысокая точность измерений,связанная с отбором мощности от электродвигателя при механическом соединении его ротора с полым ротором ЭМИ
Цель изобретения - повышение точности измерения.
Указанная цель достигается тем, что датчик частоты вращения подключен по выходу преобразователя момента электродви0 гателя, выполненного в виде сумматора, дифференцирующего звена, двух блоков умножения и двух блоков задания, подключенных к первым входам соответствующих блоков умножения, выходы которых под5 ключены к соответствующим входам сумматора, выход которого является выходом преобразователя момента электродвигателя, при этом второй вход первого блока умножения подключен к выходу дифферен0 цирующего звена, вход которого подключен к второму входу второго блока умножения и является входом преобразователя момента электродвигателя.
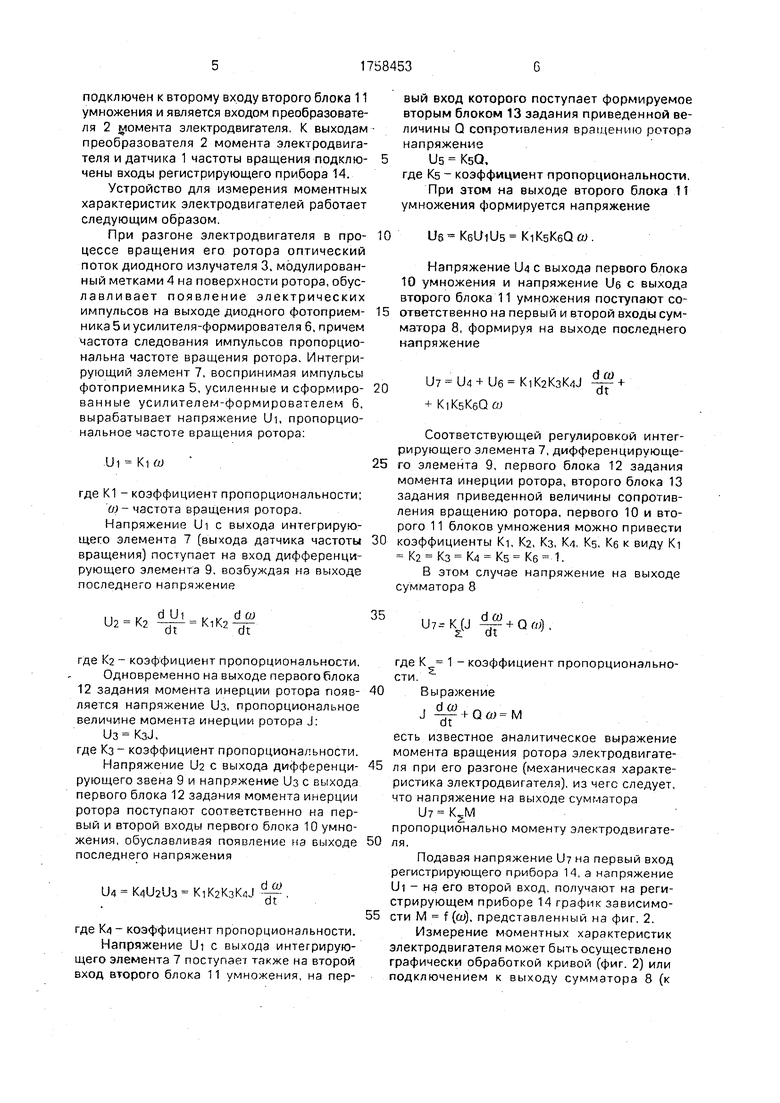
На фиг. 1 представлена функциональ5 ная схема устройства, на фиг 2 - пример измерения моментной характеристики ра- диально-упорного мотора-подшипника с бесконтактным газомагнитным подвесом ротора.
0Устройство для измерения моментных
характеристик электродвигателей содержит датчик 1 частоты вращения двигателя и преобразователь 2 момента электродвигателя. Датчик 1 частоты вращения, являющийся
5 первичным преобразователем, выполнен в виде оптоэлектронного устройства, содержащего диодный излучатель 3, модулирующие цветоконтрастные метки 4 на поверхности ротора, оптически связанные с
0 диодным излучателем 3 и диодным фотоприемником 5, усилитель-формирователь 6, входом подключенный к диодному фотоприемнику 5, и интегрирующий элемент 7, выход которого является выходом датчика 1
5 частоты вращения двигателя, а вход соединен с выходом усилителя-формирователя 6. Датчик 1 частоты вращения подключен по входу преобразователя 2 момента электродвигателя, который выполнен в видесумма0 тора 8, дифференцирующего звена 9, первого 10 и второго 11 блоков умножения, первого 12 и второго 13 блоков задания, подключенных к первым входам соответствующих блоков умножения, выходы которых
5подключены к соответствующим входам
сумматора 8, выход которого является выходом преобразователя 2 момента электродвигателя, причем второй вход первого блока 10 умножения подключен к выходу дифференцирующего звена 9, вход которого
подключен к второму входу второго блока 11 умножения и является входом преобразователя 2 .момента электродвигателя. К выходам преобразователя 2 момента электродвигателя и датчика 1 частоты вращения подклю- чены входы регистрирующего прибора 14.
Устройство для измерения моментных характеристик электродвигателей работает следующим образом.
При разгоне электродвигателя в про- цессе вращения его ротора оптический поток диодного излучателя 3, модулированный метками 4 на поверхности ротора, обус- лавливает появление электрических импульсов на выходе диодного фотоприем- ника 5 и усилителя-формирователя 6, причем частота следования импульсов пропорциональна частоте вращения ротора. Интегрирующий элемент 7, воспринимая импульсы фотоприемника 5, усиленные и сформиро- ванные усилителем-формирователем 6, вырабатывает напряжение Ui, пропорциональное частоте вращения ротора:
Ui Кю
где К1 - коэффициент пропорциональности;
О)- частота вращения ротора.
Напряжение Ui с выхода интегрирующего элемента 7 (выхода датчика частоты вращения) поступает на вход дифференцирующего элемента 9, возбуждая на выходе последнего напряжение
.. ., d Ui „ v и а) U2 K2 - foгде К2 - коэффициент пропорциональности.
Одновременно на выходе первого блока 12 задания момента инерции ротора появляется напряжение 1)з, пропорциональное величине момента инерции ротора J:
, где Кз - коэффициент пропорциональности.
Напряжение Da с выхода дифференцирующего звена 9 и напряжение Us с выхода первого блока 12 задания момента инерции ротора поступают соответственно на первый и второй входы первою блока 10 умножения, обуславливая появление на выходе последнего напряжения
U4 K4U2U3-KlK2K3K4J ,
где K/j - коэффициент пропорциональности. Напряжение Ui с выхода интегрирующего элемента 7 поступает также на второй вход второго блока 11 умножения, на первый вход которого поступает формируемое вторым блоком 13 задания приведенной величины Q сопротивления вращению ротора напряжение
Us KsQ, где Ks - коэффициент пропорциональности.
При этом на выходе второго блока 1 умножения формируется напряжение
U8 K6UiU5 KiK5K6Q y.
Напряжение U4 с выхода первого блока 10 умножения и напряжение Ue с выхода второго блока 11 умножения поступают соответственно на первый и второй входы сумматора 8, формируя на выходе последнего напряжение
U7 U4 + U6 KiK2K3K4J + KlK5K6Qo
dtu dt
Соответствующей регулировкой интегрирующего элемента 7, дифференцирующего элемента 9, первого блока 12 задания момента инерции ротора, второго блока 13 задания приведенной величины сопротивления вращению ротора, первого 10 и второго 11 блоков умножения можно привести коэффициенты Ki, K2, Кз, K/i, KS, Кб к виду KI К2 Кз К4 К5 К6 1.
В этом случае напряжение на выходе сумматора 8
U7--Ks(J + Qw).
Ю о.) М
где К 1 - коэффициент пропорциональности.
Выражение
. d со J ВТ
есть известное аналитическое выражение момента вращения ротора электродвигате- ля при его разгоне (механическая характеристика электродвигателя), из чего следует, что напряжение на выходе сумматора
U
пропорционально моменту электродвигате- ля.
Подавая напряжение U на первый вход регистрирующего прибора 14, а напряжение Ui - на его второй вход, получают на регистрирующем приборе 14 график зависимо- сти М f (о), представленный на фиг. 2.
Измерение моментных характеристик электродвигателя может быть осуществлено графически обработкой кривой (фиг. 2) или подключением к выходу сумматора 8 (к
выходу преобразователя 2 момента) измерительного прибора - вольтметра, програ- дуированного в ньютонометрах.
Таким образом, за счет выполнения преобразователя момента электродвигате- ля в виде электронного устройства, входом соединенного с выходом датчика частоты вращения двигателя, выполненного в виде диодного излучателя и диодного фотоприемника, оптически связанных с цветоконт- растными метками на поверхности ротора, обеспечивается бесконтактное измерение моментных характеристик электродвигателя, исключающее отбор мощности от электродвигателя при выполнении изме- рений и позволяющее при упрощении конструкции устройства повысить точность измерений,
Формула изобретения Устройство для измерения моментных характеристик электродвигателей, содерФиё. 2
жащее датчик частоты вращения двигателя и преобразователь момента электродвигателя, подключенные к входам двухкоорди- натного самописца, отличающееся тем, что, с целью повышения точности, датчик частоты вращения подключен к входу преобразователя момента электродвигателя, который выполнен в виде сумматора, дифференцирующего звена, двух блоков умножения и двух блоков задания, подключенных к первым входам соответствующих блоков умножения, выходы которых подключены к соответствующим входам сумматора, выход которого является выходом преобразователя момента электродвигателя, при этом второй вход первого блока умножения подключен к выходу дифференцирующего звена, вход которого подключен к второму входу второго блока умножения и является входом преобразователя момента электродвигателя.
мин Ш3
| 1972 |
|
SU420893A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Испытание электрических микромашин/Под ред проф Н В Астахова М , 1984, с.21. | |||
