Изобретение относится к землеройно- транспортным машинам (ЗТМ) и может применяться в бульдозерах с поворотным отвалом (англедозеры), автогрейдерах и планировщиках.
Целью изобретения является снижение энергоемкости копания грунта.
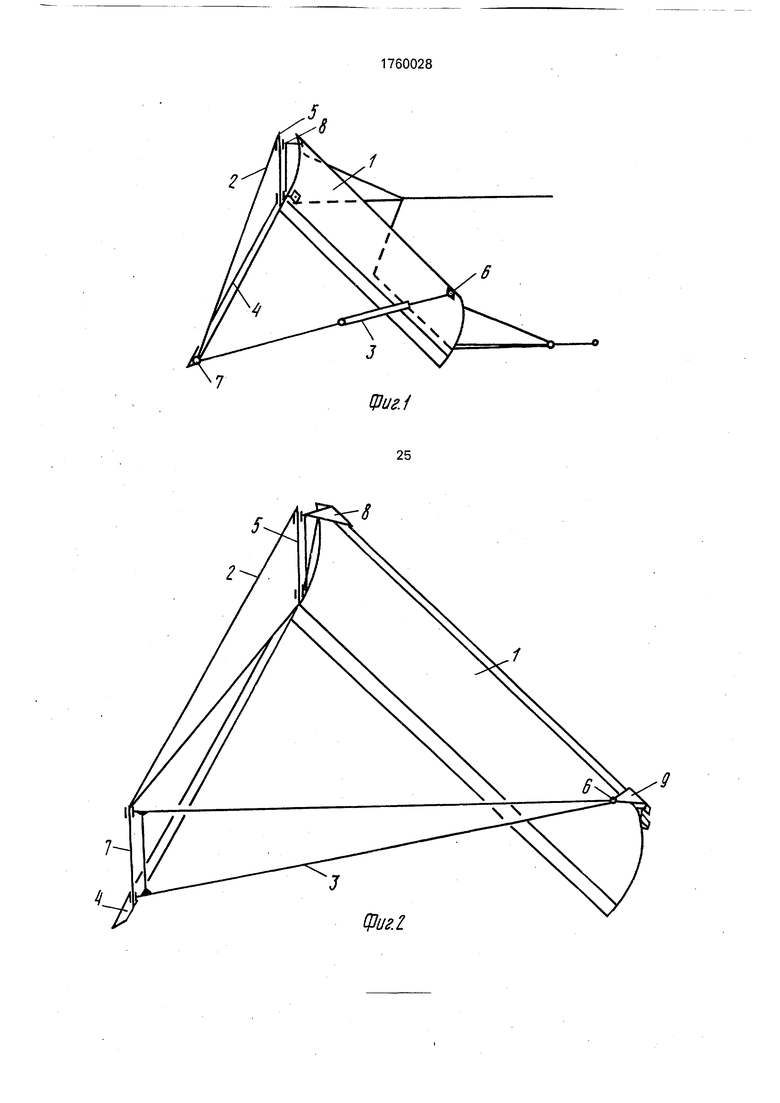
На фиг.1 представлен рабочий орган с треугольной рамой; на фиг.2 - то же, с прямоугольной рамой; на фиг.3-9 - схемы (в плане) движения шарниров соединения составляющих рабочего органа; на фиг. 10-11 -схемы (в плане)сложения отвала; на фиг. 12 - один из вариантов направляющего устройства отвала; на фиг. 13 - разрез А-А на фиг.12; нафиг.14- направляющее устройство рамы; на фиг, 15 - вариант рабочего органа с соединением двух шарниров с одним гидроцилиндром и его штоком; на фиг. 16 схема осуществления движения гидроцилиндром правой опоры; на фиг.17 - схема осуществления движения гидроцилиндром левой опоры; на фиг,18 - схема управления движением обеих опор одним гидроцилиндром; на фиг, 19 - вариант устройства, связывающего укосину с нижним основанием рамы; на фиг.20 - схема взаимного расположения нижних частей рамы и промежуточного элемента между рамой и укосиной.
Рабочий орган состоит из отвала 1, рамы 2 треугольной (фиг, 1) или прямоугольной (фиг.2) формы и укосины 3, выполненной в виде гидроцилиндра (фиг.1) или треугольника (фиг.2). Нижнее основание рамы 2 выполнено совместно с дополнительным ножом 4 и прикрывается им по ходу движения машины.
VI О О О Ю 00
Рама 2 соединяется с отвалом 1 посредством шарнира 5, укосина 3 - шарнира 6, а рама 2 и укосина 3 соединяются между собой шарниром 7. Шарнир 5 является вертикальным цилиндрическим, а шарниры 6 и 7 могут быть и шаровыми. Между шарниром 7 и укосины 3 и рамой 2 и между их шарнирами 5 и 6 с одной стороны и концами отвала
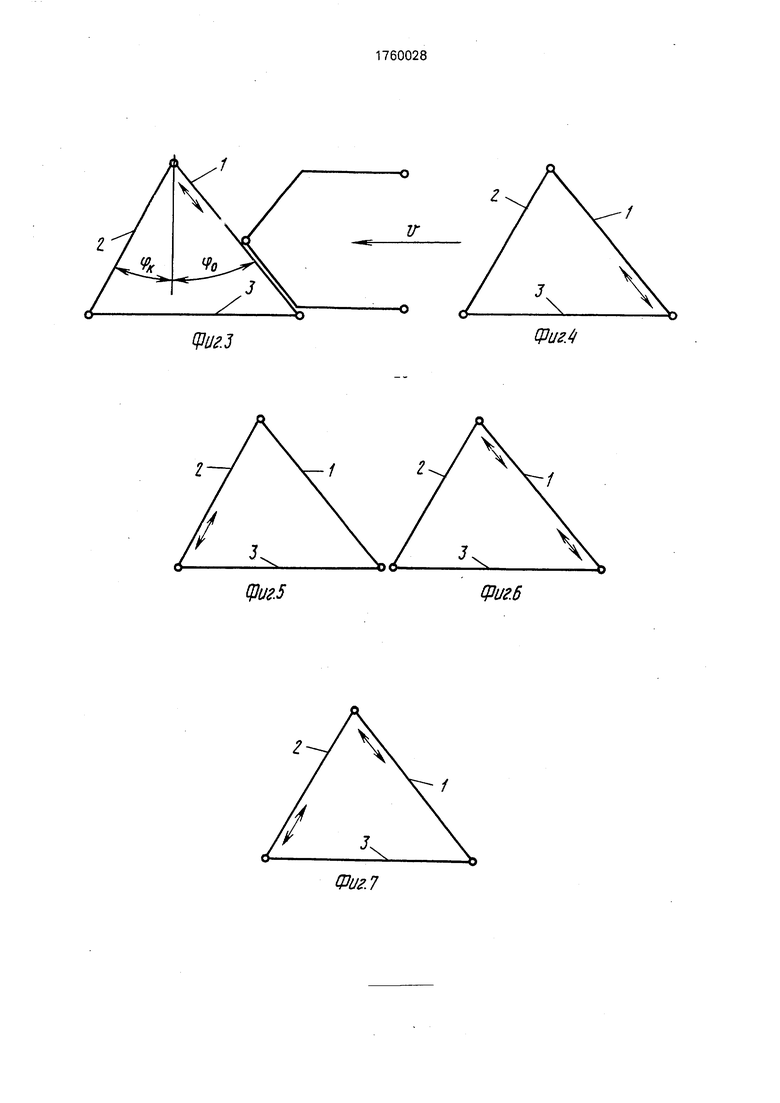
1с другой, могут быть промежуточные опоры 8, 9 и 10. Они могут выполняться неподвижными (например, 8 - фиг.1), даже отсутствовать (например, 10 - фиг.1 и 2). Некоторые варианты рабочих органов могут иметь опоры 8, 9 и 10 подвижными вдоль отвала 1 и рамы 2 все (фиг.9) или часть их (фиг.3-8).
На фиг.З показана схема движения шарнира 5 вдоль правого конца отвала 1; на фиг.4 - схема движения шарнира 6 вдоль левого конца отвала 1; на фиг.5 - схема движения шарнира 7 вдоль левого конца рамы 2; на фиг.6 - схема движения шарниров 5 и 6 вдоль отвала 1; на фиг.7 - схема движения шарнира 5 вдоль отвала 1 и шарнира 7 вдоль рамы 2; на фиг.З - схема движения шарнира 6 вдоль отвала 1 и шарнира 7 вдоль рамы 2; на фиг.9 - схема движения шарниров 5 и 6 вдоль отвала 1 и шарнира 7 вдоль рамы 2.
Относительная подвижность опор 8, 9 и 10 шарниров 5, 6 и 7 продиктована необходимостью регулирования угла установки ножа в плане в процессе работы машины, т.к. текущее значение этого угла зависит в сильной степени от условий разрабатываемой среды (грунт, материалы укладываемой дорожной одежды, снег и т.п.). Чем больше взаимная степень свободы частей рабочего органа, тем легче осуществляется необходимый по технологическим требованиям угол установки дополнительного горизонтального ножа.
Нормальное значение угла установки ножа в плане р несколько меньше такого же угла отвала fo , т.к. нож расположен дальше отвала относительно центра поворота машины. Наибольшее и наименьшее значения угла установки ножа рн вычисляются из условий учета (помогает или сопротивляется) удерживающего при помощи ходового устройства машину от разворота момента.
Треугольная рама 2 (фиг.1) выгодна тогда, когда шарнир 5 и опора 8 соединения рамы 2 с отвалом 1 выполнены неподвижными вдоль отвала. В таком случае масса рамы
2является наименьшей.
Прямоугольная рама 2 (фиг.2) применяется тогда, когда два или все три шарниры
выполнены подвижными. В этом случае поднимающий со стороны ножа момент воспринимается обоими механизмами изменения положения шарниров на отвале (при выполнении шарнира соединения укосины с отвалом вертикальным).
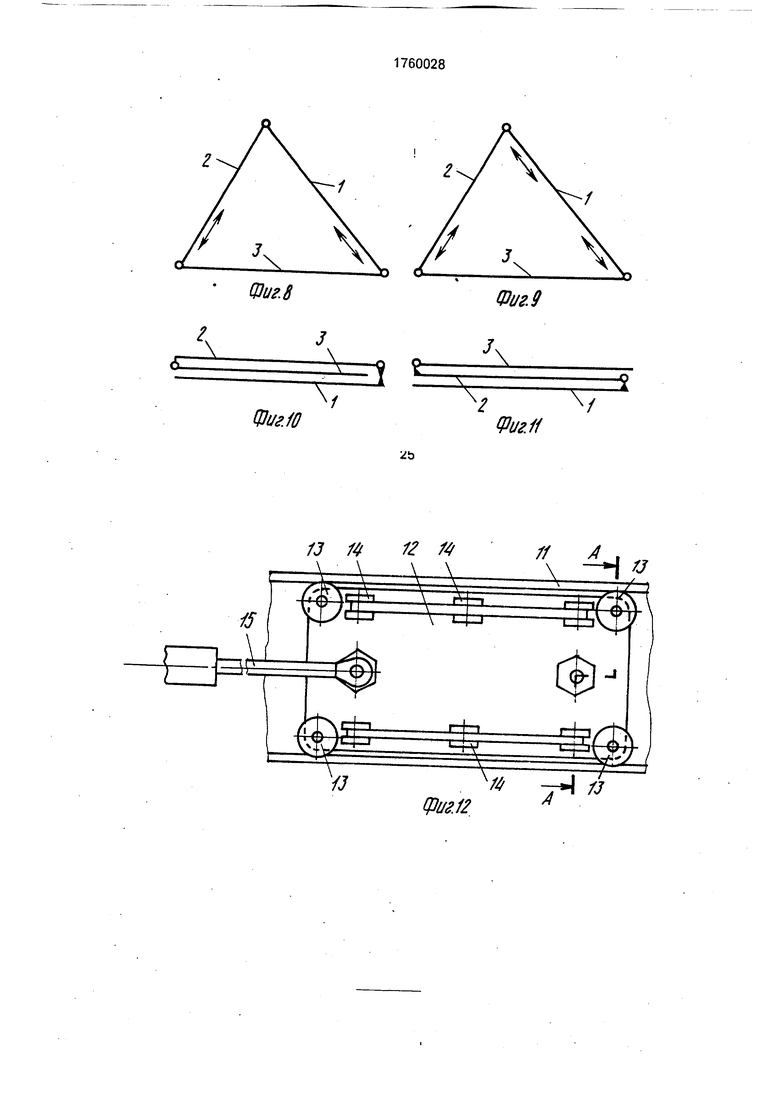
Складывается рабочий орган перед отвалом в транспортное (нерабочее) положение поворотом укосины 3 вовнутрь, если она
0 короче рамы 2. Такое положение показано на фиг.10. Для этой цели дальняя от отвала сторона рамы 2 выполняется Г-образной, причем с загибом во внутреннюю сторону. Если же рама 2 короче укосины 3, то она
5 складывается во внешнюю сторону, что показано на фиг.11. Естественно, дальняя сторона рамы 2 выполняется с загибом во внешнюю сторону.
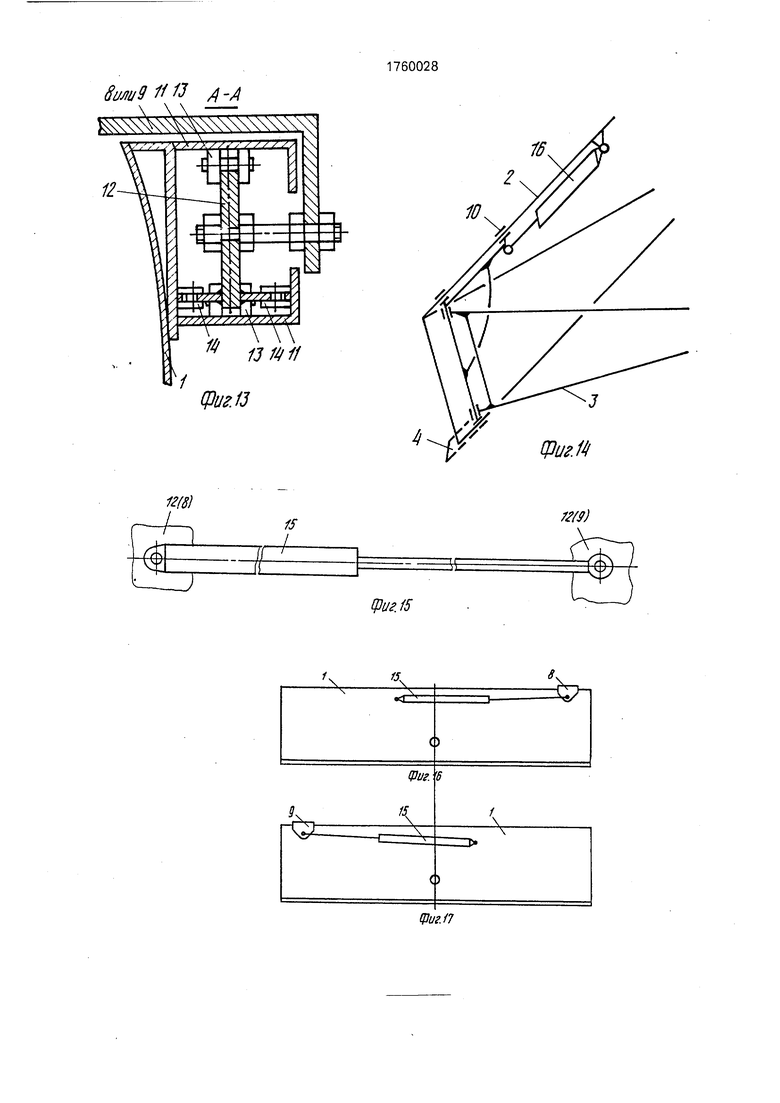
На фиг.12 и 13 показан один из вариан0 тов направляющего устройства отвала. В данном случае направляющим устройством является прикрепленные друг к другу профили 11, по которым двигается каретка 12 с опорой 8 или 9. Катки 13 каретки 12 воспри5 нимают вертикальную нагрузку со стороны опоры 8 или 9, а катки 14 - горизонтальную. Движением каретки 12 управляют приводом, например, в виде гидроцилиндра 15. На фиг. 16 показана схема осуществления
0 движения правой опоры 8 гидроцилиндром 15, а на фиг.17 - левой опоры 9.
Для опоры 10 (фиг.14) направляющим устройством является верхнее и нижнее основания рамы 2. Перемещение опоры 10
5 осуществляется приводом, например, в виде гидроцилиндра 16.
Можно приводить в движение две опоры 8 и 9 с каретками 12 одним гидроцилиндром 15 (фиг. 15). Для этого гидроцилиндр 15
0 соединяется с одной кареткой 12, например, опоры 8, а шток его - с другой - опоры 9. Если необходимо управлять опорой 8, то фиксируют неподвижно опору 9 и наоборот. Если хотят управлять движением обеих опор 8 и 9, то применяют любой механизм
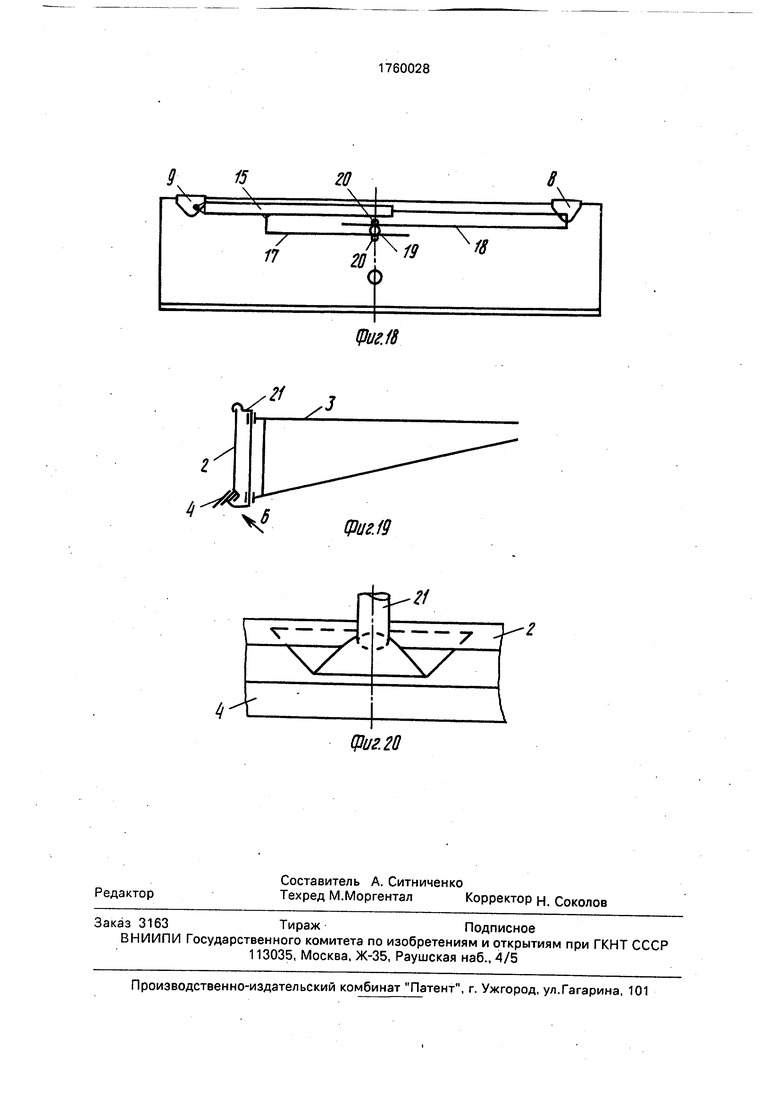
5 для равного движения их, например, на фиг. 18. Механизм состоит из двух реек 17 и 18, соединенных, соответственно, с гидроцилиндром 15 и опорой 8. Рейки 17 и 18 зацеплены с зубчатым колесом 19 с обеих
0 его сторон и прижаты роликами 20. Ось, относительно которой вращается зубчатое колесо 19, прикреплена неподвижно к отвалу 1. Фиксация опор 8 и 9 при необходимости осуществляется болтовым соединением
5 их к верхнему профилю 11. Для крепления без напряжения одевают на болт шайбу, толщина которой соответствует зазору между опорой 8 или 9 с одной стороны и профи- ли 11 - с другой. Вариант с двухсторонним
креплением гидроцилиндра на шарнирах с попеременной фиксацией их на тыльной стороне отвала особенно выгоден для машины с возможностью работы с попеременным отваливанием (перемещением) грунта на обе стороны, когда это необходимо по технологическим требованиям. Это же решение позволяет выбирать, какую из сторон шарниров изменять: сторону рамы или сторону укосины.
Устройство, связывающее укосину 3 с нижним основанием рамы 2, необходимо для схем рабочего органа по фиг.5, 7, 8 и 9. Один из вариантов этого устройства показан на фиг. 19. Промежуточный элемент 21 одевается на верхнее основание рамы 2 сверху, а к пазу нижней части рамы входит снизу. На фиг.20 приведена схема взаимного расположения нижних частей рамы 2 и промежуточного элемента 21 по стрелке Б на фиг. 19. Такая треугольная форма, одевающейся нижней части промежуточного элемента 21 в паз нижнего основания рамы 2, позволяет осуществлять движение ее даже при забитом состоянии паза.
Работает рабочий орган ЗТМ следующим образом. Грунт вырезается дополнительным горизонтальным ножом 4 и накапливается перед отвалом 1. Нож 4 установлен под углом в плане рн, а отвал - под углом р0- Грунт двигается беспрепятственно перед отвалом 1 в сторону, Боковая составляющая сопротивления грунта копанию отвалом, находящимся под большим углом установки ро, компенсируется боковой составляющей сопротивления грунта резанию ножом, находящимся под углом установки рн. Несоответствие их, выражающееся уводом машины от курса в сторону, компенсируется увеличением или уменьшением угла установки ножа tp с помощью, например, гидроцилиндра, управляемого из кабины расределителем жидкости.
Формула изобретения
1. Рабочий орган землеройно-транспор- тной машины, включающий поворотный в плане отвал с ножом, расположенный в одной плоскости с ножом поворотного отвала дополнительный горизонтальный нож с укосиной, отличающийся тем, что, с целью
снижения энергоемкости копания грунта, он снабжен вертикально установленной рамой, которая боковой стороной, выполненной в виде стойки, шарнирно соединена с одной из боковых сторон отвала, другой шарнирно через укосину - с верхней частью другой боковой стороны отвала с возможностью фиксированного поворота рамы, к нижнему основанию которой жестко прикреплен дополнительный горизонтальный
нож.
2.Рабочий орган поп.1,отличающ и и с я тем, что рама выполнена треугольной и укосина - в виде гидроцилиндра.
3.Рабоий орган поп,1,отличающий- с я тем, что рама выполнена прямоугольной
с диагональной растяжкой, а укосина выполнена в виде треугольника.
4.Рабочий орган по пп.1 и 3, о т л и ч а- ю щ и и с я тем, что дальняя от отвала
сторона прямоугольной рзмы выполнена в горизонтальной плоскости Г-образной.
5.Рабочий орган по пп.1-3, отличающийся тем, что шарнир соединения рамы с отвалом выполнен подвижным вдоль отвала.
6.Рабочий орган по пп.1-3, отличающийся тем, что шарнир соединения укосины с отвалом выполнен подвижным вдоль отвала.
7. Рабочий орган по пп.1-3, отличающийся тем, что шарнир соединения укосины с рамой выполнен подвижным вдоль рамы.
8.Рабочий орган по пп,1-3 и 5, о т л и - чающийся тем, что шарнир соединения
укосины с отвалом выполнен подвижным вдоль отвала.
9.Рабочий орган по пп.1-3 и 5, о т л и - чающийся тем, что шарнир соединения
укосины с рамой выполнен подвижным вдоль рамы.
10.Рабочий орган по пп.1-3 и 7, о т л и- чающийся тем, что шарнир соединения укосины с отвалом выполнен подвижным
вдоль отвала.
11.Рабочий орган по пп.1-3, 5 и 8, о т - личающийся тем, что шарнир соединения укосины с рамой выполнен подвижным вдоль рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган землеройно-транспортной машины | 1981 |
|
SU1101523A1 |
| Рабочее оборудование бульдозера | 1979 |
|
SU881214A1 |
| Бульдозер | 1978 |
|
SU909030A1 |
| СПОСОБ СОЗДАНИЯ НА СКЛОНАХ ПЛАНТАЦИЙ КУЛЬТУРЫ СОЛОДКИ, ПРИГОДНЫХ ДЛЯ МАШИННОЙ УБОРКИ, И МАШИНА ДЛЯ ПОДЕЛКИ ВЛАГОНАКОПИТЕЛЬНЫХ МИКРОТЕРРАС С ОДНОВРЕМЕННОЙ ПОДГОТОВКОЙ ПОЧВЫ ПОД ПОСАДКУ ЧЕРЕНКОВ ИЗ КОРНЕВИЩ СОЛОДКИ ГОЛОЙ ПОЙМЕННОГО, ЛИМАННОГО И СУХОСТЕПНОГО ЭКОТИПОВ | 2003 |
|
RU2250587C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ОТРЫВКИ КОТЛОВАНОВ | 1991 |
|
RU2049870C1 |
| РАБОЧИЙ ОРГАН БУЛЬДОЗЕРА | 1991 |
|
RU2011753C1 |
| Бульдозерное оборудование | 2016 |
|
RU2627512C1 |
| Землеройная машина для вскрытия трубопроводов | 1979 |
|
SU887740A1 |
| Рабочий орган землеройно-транспортной машины | 1979 |
|
SU899771A1 |
| Бульдозер | 1980 |
|
SU1077995A1 |
Изобретение относится к землеройно- транспортным машинам и может применяться в бульдозерах с поворотным отвалом, автогрейдерах и планировщиках и служит для снижения энергоемкости копания грунта. Рабочий орган имеет поворотный в плане отвал, дополнительный горизонтальный нож с укосиной, вертикальную раму. Рама боковой стороной шарнирно соединена с одной из боковых сторон отвала, другой шарнирно, через укосину, с верхней частью другой боковой стороны отвала. К нижнему основанию рамы жестко прикреплен дополнительный горизонтальный нож. Если рама выполнена треугольной, то применяется укосина в виде гидроцилиндра. Если рама выполнена прямоугольной, то укосина выполнена в виде треугольника. Шарниры соединения рамы с отвалом, укосины с отвалом и укосины с рамой могут быть выполнены подвижными соответственно вдоль отвала и рамы по одному, по два и все три. 10 з.п. ф-лы, 20 ил. у Ё
5
Фиг.1
Фиг. I
Фиг.З
фиг.5
Фиг.7
V
Фиг4
Фигб
Фиг.8
Л
Щи&Ю
13 14 % М
15
МНЕ
Фиг. 9
v
/
fPU2.11
± а
Iх
л.
. | .Vе
®
YJ
№
I Я
фиг.12
8шщ91 П А-А
13М11
фиг. 13
т)
fS
i
2
10
Фиг. 14
W9)
(риг. 15
QJut.f8
(Puzfl
(Риг. 20
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система лучистого отопления и радиационного охлаждения | 1976 |
|
SU564492A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочий орган землеройно-транспортной машины | 1981 |
|
SU1101523A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
