1
(21)4355668/08
(22)12.05.88
(31)01842/87
(32)13.05.87
(33)СН
(46) 15.09.92. Бюл. №34
(71)Эльпатроник АГ (СН)
(72)Рудольф Виттвер (СН)
(56)Патент Германии
№ 3534209, С 2, кл. В 65 G 24/04, опублик.
1987.
(54) МЕХАНИЗМ ПОДАЧИ ОБЕЧАЕК
(57)Использование изобретения: для транспортирования обечайки от листогибочного устройства к сварочной машине. Сущность изобретения: механизм содержит станину
2. На станине 2 расположены направляющие 5. По направляющим перемещается каретка 6. На приводном валу 12 смонтирован вращающийся кривошип 11. Кривошип 11 соединен с шатуном 16, а шатун 16 соединен с балансиром 18 бистабильного пружинного узла, пружина 21 которого смещена относительно продольной оси бистабильного пружинного узла, соединитель- ная штанга 23 соединена с распределительным валом 26. На распределительном валу 26 посредством штанги 35 и болтов 32 закреплены поворотные собачки. Механизм подачи обечаек оснащен отклоняющим кулачком 38, с которым взаимодействует ролик балансира. 3 з. п. ф-лы, 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
| Устройство для подготовки металлических заготовок к сварке при изготовлении банок | 1990 |
|
SU1831397A3 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| ШВЕЙНЫЙ АВТОМАТ ДЛЯ ПРИШИВАНИЯ ФУРНИТУРЫ К ТЕСЬМЕ | 1991 |
|
RU2023087C1 |
| Механизм кнопочного управления приводом ткацкого станка | 1990 |
|
SU1756417A1 |
| Устройство для подачи навоза в навозохранилище | 1986 |
|
SU1335217A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Станок для прошивки матов | 1990 |
|
SU1758115A1 |
| Насос | 1985 |
|
SU1343101A1 |

Изобретение относится к машиностроению, в частности к механизмам подачи обечаек.
Известен механизм подачи обечаек, содержащий каретку, установленную на основаниисвозможностьювозвратно-поступательного перемещения по направляющим между задней и передней мертвыми точками, расположенную на каретке с возможностью перемещения между рабочим положением покоя, по меньшей мере одну собачку для обечайки, кривошип- но-шатунный механизм с двумя шарнирами, кривошип которого установлен с возможностью вращения и посредством первого шар- нира соединен с его шатуном, а посредством второго - с кареткой и распределительный механизм с упругим элементом для поворота собачки.
Недостатком известного механизма подачи является то, что тормоза распреде|сл
|С
лительного механизма расходуют часть энергии, предназначенной для перемещения кареток. Хотя эта часть энергии мала, однако она может требовать осуществления мероприятий по охлаждению, если каретки и распределительный механизм должны перемещаться с большой скоростью, что имеет место на современных машинах для изготовления банок, на которых по меньшей мере сваривается в минуту 500 обечаек.
Цель изобретения - снижение энергозатрат.
Это достигается за счет того, что упругий элемент распределительного механизма выполнен в виде расположенного между шатуном и собачкой бистабильного пружинного узла, распределительный механизм выполнен в виде шарнирно смонтированного на основании балансира с роликом, который посредством пружин бистабильного пружинного узла соединен с шатуном ;0
го
v4
CJ
CJ
вошипно-шатунного механизма, при этом механизм подачи оснащен установленным на основании в зоне задней мертвой точки каретки отклоняющим кулачком, ролик балансира расположен с возможностью взаимодействия с отклоняющим кулачком для предотвращения преждевременного возврата бистабильного пружинного узла в положение, соответствующее рабочему положению собачки, распределительным валом для собачки и шарнирным четырех- звенником для соединения распределительного вала с балансиром.
Одно из звеньев шарнирного четырех- звенника выполнено в виде регулируемой по длине соединительной штанги и перекидным рычагом, причем шатун кривошипно- шатунного механизма оснащен распределительным кулачком для перемещения собачки s рзбсчсс лсяс;: с:;ис с предотвращением возврата, а перекидной рычаг оснащен роликом, смонтированным с возможностью взаимодействия с распределительным кулачком.
Пружина бистабильного пружинного узла выполнена в виде пружины растяжения. Ось пружины бистабильного пружинного механизма установлена со смещением относительно его продольной оси.
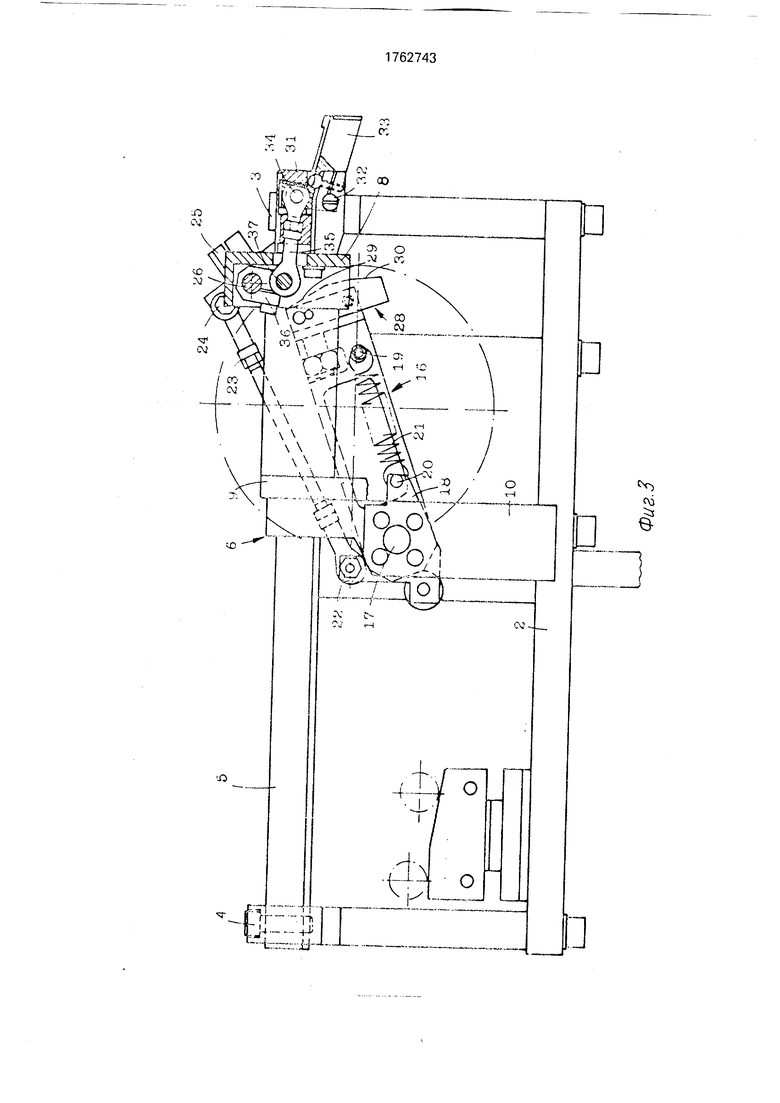
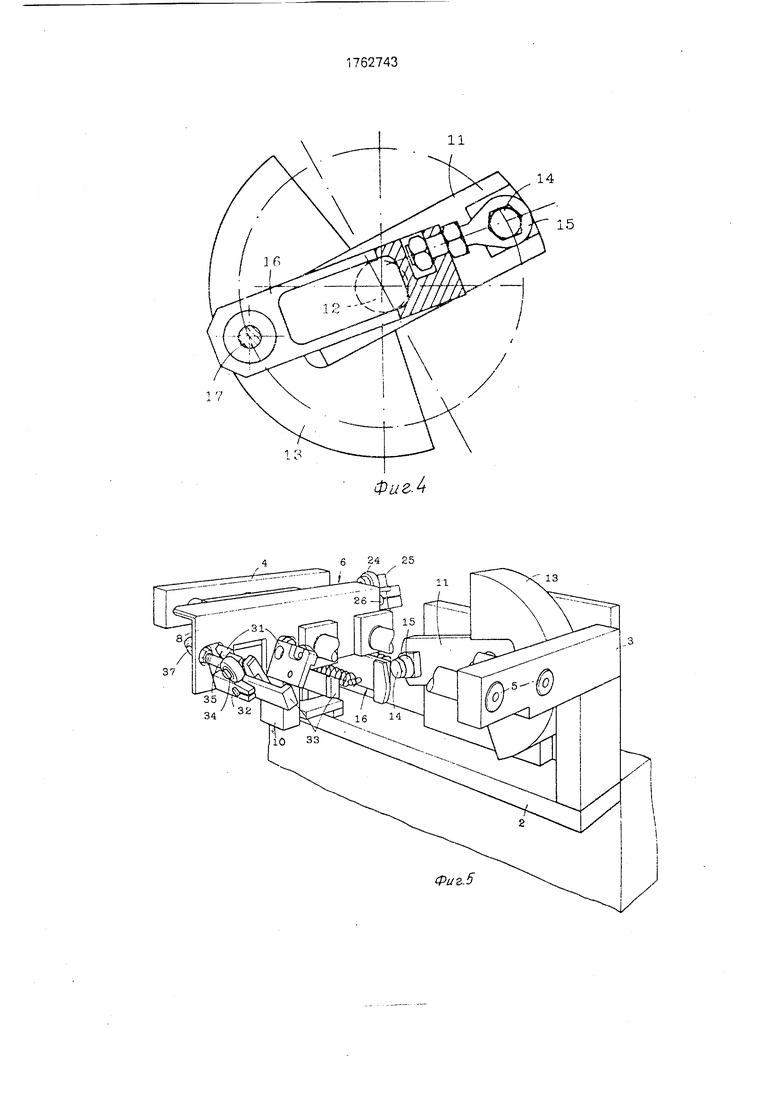
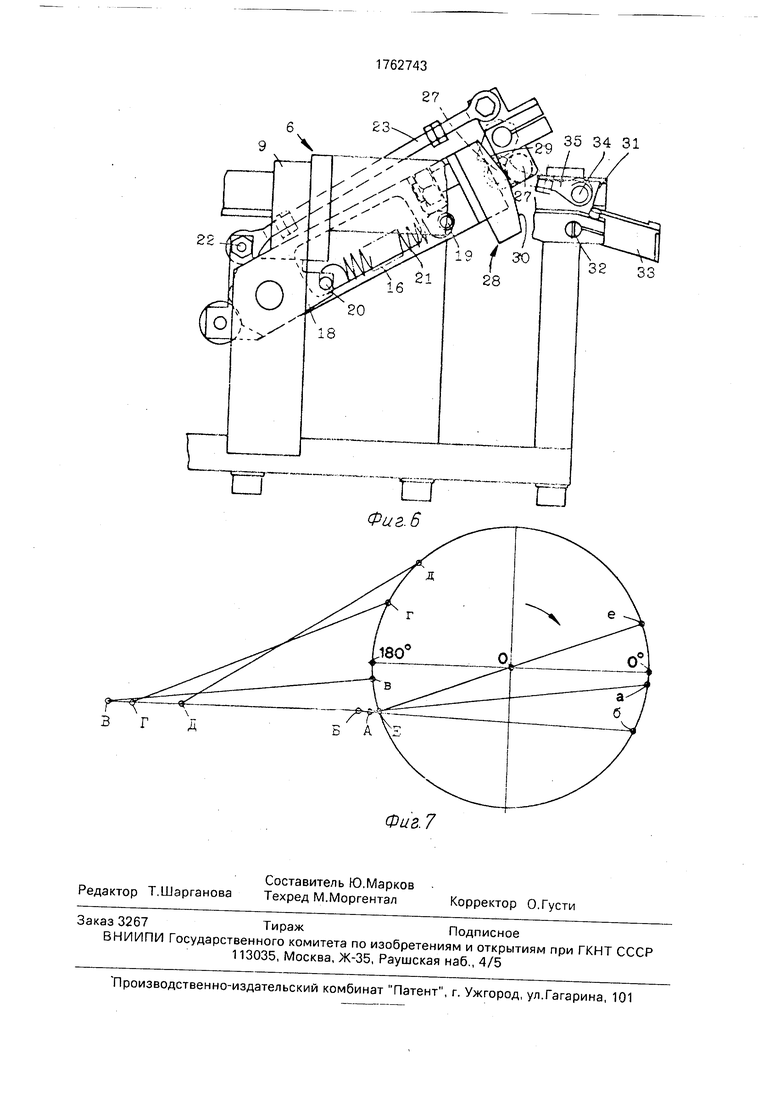
На фиг. 1 изображен общий вид на механизм подачи обечаек, вид сверху; на фиг. 2 - вид на механизм подачи спереди (частичный разрез этого вида в вертикальной плоскости по линии II-I фиг. 1); на фиг. 3 - вид на механизм подачи сбоку (частичный разрез этого вида в вертикальной плоскости по линии Ill-Ill фиг. 1); на фиг. 4 - частичный разрез в вертикальной плоскости по линии IV-IV на фиг. 1; на фиг. 5 - вид к аксонометрии на механизм подачи в положении задней мертвой точки; на фиг. 6 - вид механизм в момент выхода из положения задней мертвой точки; на фиг. 7-дизграмма перемещений механизма.
Механизм подачи обечаек 1 предназначен для транспортировки последних в зону сварочной машины, где продольные края обечайки сваривают.
Механизм подачи содержит станину 2 с передней рамой 3 и задней рамой 4. Передняя и задняя рамы расположены параллельно одна другой и соединены штангами, являющимися направляющими 5 (штанги выполнены полыми и подключены к водяному охлаждению, чтобы во время работы они оставались холодными и сохранили точность направления). На направляющей 5 с возможностью возвратно-поступательного перемещения установлена каретка 6 с втулками 7. Втулки 7 непосредственно установлены на направляющих 5. Втулки 7 соединены между собой траверсами 8 и 9. На траверсе 9 закреплена щека 10, расположенная перпендикулярно плоскости станины и параллельно направляющим 5.
На чертежах перемещений каретки направо означает перемещение вперед, при этом обечайка транспортируется вперед. И наоборот, перемещение каретки 6 налево
0 означает перемещение назад, которое каретка совершает без обечайки.
Перемещение каретки 6 осуществляется посредством кривошипно-шатунного механизма. Кривошип 11 этого механизма
5 установлен на приводном валу 12 с возможностью вращения. Приводной вал 12 установлен перпендикулярно направляющим 5 и в плоскости станины 2. На валу 12 закреплен противовес 13 для выравнивания инер0 ционной массы кривошипа 11 и соединенных с ним узлов.
Посредством шарнира 14 кривошип 11 соединен с опорой 15 шатуна 16. В свою очередь шатун 16 посредством шарнира 17
5 соединен со щекой 10, т, е. с кареткой 6. Рабочая длина шатуна 1 б между шарнирами 14 и 17 может регулироваться посредством опоры 15.
На каретке 6 посредством шарнира 17
0 установлен распределительный механизма, выполненный в виде балансира 18 с роликом. На шатуне на некотором расстоянии от балансира 18 закреплена цапфа 19, соединенная с цапфой 20 посредством пружины
5 растяжения 21. Вместе с балансиром 18 пружина 21 образует бистабильный пружинный узел. Это означает, что в зависимости от положения шатуна 16 линия действия пружины может проходить на расстоянии
0 под или на расстоянии над геометрической осью шарнира 17 и соответственно этому растягивающая сила пружины 21 окажет крутящий момент на балансир 18 в направлении по ходу часовой стрелки или против
5 него. Балансир 18 посредством шарнира 22 соединен с соединительной штангой 23, регулируемой по длине. Шарнир 22 смещен относительно шарнира 17 больше, чем на 90° в направлении цапфы 20.
0Соединительная штанга 23 посредством шарнира 24 соединена с одним плечом двуплечего перекидного рычага 25. Перекидной рычаг 25 закреплен на распредели- тельном валу 26, установленном с
5 возможностью вращения в траверсе 8 каретки 6.
На другом плече перекидного рычага 25 смонтирован ролик 27 с возможностью взаимодействия с распределительным кулачком 28. Распределительный кулачок 28
выполнен с клиновым участком 29 и сопряженным с ним дугообразным участком 30, центр которого расположен на геометрической оси шарнира 17.
На траверсе 8 размещены две стойки 31 под подшипники. На каждой стойке 31 посредством болта 32 смонтирована с возможностью поворота собачка 33. Болты 32 расположены перпендикулярно направляющим 5 приблизительно горизонтально, поэтому собачки 33 могут перемещаться между нижним конечным положением (рабочим положением) и верхним конечным положением (положением покоя). Для осуществления поворота каждая из собачек 33 соединена посредством шарнира 34 со штангой 35, выполненной регулируемой по длине и соединенной с рычагом 36, установленным на распределительном валу 26 посредством шарнира 37.
В зоне задней мертвой точки каретки 6 на станине 2 установлен регулируемый отклоняющий кулачок 38. На кулачке 38 выполнен клиновидный участок 39 и горизонтальный участок 40, параллельные направляющей 5. С участками 39 и 40 взаимодействует ролик 41 балансира 18.
Работает механизм следующим образом.
На фиг. 1-4 собачки 33 изображены в положении покоя, в котором они держатся за счет того, что пружина 21 согласно фиг. 3 оказывает на балансир крутящий момент в направлении против хода часовой стрелки так, что соединительная штанга 23 также оказывает на распределительный вал 26 крутящий момент в направлении против хода часовой стрелки. Вследствие этого каждая из обеих штанг 35 передает на соответствующую собачку 33 крутящий момент в направлении по ходу часовой стрелки, т. е. собачки опускаются. Рабочее положение каждой собачки определяется регулируемой длиной штанги 35.
На фиг. 7 точками А-Е обозначены различные положения шарнира 14 (его геометрической оси) при полном обороте кривошипа 11. Прямая с нанесенными на нее точками А-Е указывает нахождение шарнира 17 (его геометрической оси) при положении шарнира 14 от а до е.
Когда кривошип 11 вращается в направлении стрелы, исходя из обозначенного 0° положения, то шарнир 14 попадает в положение а, в то время как шарнир 17, занимает положение А. Шатун 16занимает при этом положение, в котором линия действия пружины 21 сильно приближена к геометрической оси шарнира 17.
На дальнейшем пути шарнира 14 в точке б и шарнира 17 в точке В линия действия пружины 21 пересекает геометрическую ось шарнира 17, и состоящий из балансира 18 и
пружины 21 бистабильной пружинный узел движется через мертвую точку и затем переходит в состояние обратного действия. Усилие пружины 21 оказывает на балансир 18 крутящий момент в направлении по ходу
часовой стрелки, и балансир 18 поворачиваясь через штангу 23, распределительный вал 26, который при этом вращается по часовой стрелке, через шарниры 34 и 36 поворачивает собачки 33 в направлении против
хода часовой стрелки, т. е. вверх в положение покоя.
При продолжении вращения кривошипа 11 в направлении стрелы шатун 16 перемещает каретку 6 назад, сначала с
повышающейся, а затем с уменьшающейся скоростью. Когда шарнир 14 проходит точку в шарнир 17 находится в точке В, каретка 6 при этом достигает мертвой точки. На последнем участке пути к задней мертвой
точке ролик 41 балансира 18 поступает на отклоняющий кулачок 38, вследствие этого балансир 18 временно предотвращается от возвращения в первоначальное положение (фиг. 3).
Когда шарнир 14 достиг точки г, а шарнир 17 точки Г, то ролик 41 с горизонтального участка 40 отклоняющего кулачка 38 перемещается на клиновидный участок 39. Вследствие этого бистабильный пружинный
узел (18, 21) возвращается в исходное положение. При этом шарнир 14 перемещается из точки г в точку д, а шарнир 17 - из точки Г в точку Д. Вследствие этого пружина 21 оказывает на балансир 18 и вал 26
крутящий момент против хода часовой стрелки. Штанги 35 переместятся вперед, а собачки 33 вниз в рабочее положение.
Несмотря на малый диапазон угла от точки г до точки д он является достаточным для того, чтобы собачки 22 могли занять рабочее положение несмотря на трение, возникшее вследствие загрязнения.
При этом распределительный кулачок 28 прижимает клиновидный участок 29 к ролику 27, что вызывает поворот перекидного рычага 25 и вращение распределительного вала 26 против хода часовой стрелки. При прохождении шарнира 14 через точку д дугообразный участок 30 распределительного кулачка 28 воздействует на ролик 27 и предотвращает возврат собачек 33. Таким образом предусмотрено, что собачки прилегают к краю обечайки 1, которая должна перемещаться вперед.
Перемещение вперед кончается в положении шарнира 14 в точке д и шарнира 17 в точке Д. соответствующем положению каретки 6 в передней мертвой точке,
Каретка 6 начинает перемещаться назад, в то время как собачки 33 находятся в рабочем положении до тех пор. пока шарнир 14 не достиг зоны между точками а и б, в которой бистабильный пружинный узел возвращается в первоначальное положение.
Формула изобретения
пружинного узла соединен с шатуном кри- вошипно-шатунного механизма, при этом механизм подачи оснащен установленным на основании в зоне мертвой точки каретки отклоняющим кулачком.
предотвращения преждевременного возврата бистабильного пружинного узла в положение, соответствующее рабочему положению собачки, распределительным валом для собачки и шарнирным четырехзвенником для соединения распределительного вала с балансиром, шарнирный четырехзвенник оснащен регулируемой по длине соединительной штангой и перекидным рычагом, причем шатун кривошипношатунного механизма оснащен распределительным кулачком для перемещения собачки в рабочее положение для предотвращения возврата, а перекидной рычаг оснащен роликом, смонтированным с
возможностью взаимодействия с распределительным кулачком.
со
т г- см ю
/
pFfJn rl
ii i
: i i
fo +
f-Ъ-М:-i4
2 Ь
(oj
i гУ
1 тЧ г
, - V- -Л л I
TS f / pj i
, 01
oivP 9-пяо
JT
( V;
V
.,
jrCVsyA Д i
н А
21
9 30
Ч
32 f41
JO --I
8
ЯЗ
-J o
N3 .Ј CO
1в
L10
LJ
Фиг.
1 Я
34
11
14
Фиг
Фиг5
35 34 31
