Фиг. /
Изобретение относится к области механизации сельского хозяйства, в частности используется для снятия плодов с дерева, например апельсинов и манго.
Целью изобретения является повыше- ние эффективности работы.
На фиг.1 изображен общий вид предлагаемого устройства (без собственного экскаватора); на фиг.2 - его проекция.
Рабочий орган для съема плодов содер- жит стрелу 1, вертикально подвешенный на шарнире двигатель 2, вал которого имеет продолжение в виде вертикальной штанги 3 с закреплением на нижнем ее конце гибкого улавливающего пальца 4.
Устройство работает следующим образом.
Подвижная стрела 1, управляемая с места управления экскаватором, подводится сверху к кроне дерева и включается двига- тель 2, вращающий штангу 3 с улавливающим пальцем 4. П мере опускания стрелы 1 штанга 3 внедряется в крону, в зону расположения подвески плодов. Вращающийся вместе со штангой упругий палец 4 захваты- вает ветви, в том числе и нагруженные весом плодов. Веточки наклонные, не связанные с плодами, отклоняются под воздействием стержня-улавливателя.Если растянутая силой веса плода веточка попала в зону, близкую к середине улавливателя, то она скользит по его поверхности, продвигается к крючкообразному концу и разрывается.
Веточка, нагруженная плодом и попавшая в периферийную зону стержня, перебивается последним. Разрыв связи плода с веточкой происходит всегда без воздействия гибкого стержня-улавливателя 4 на плод.
Таким образом, улавливающий палец благодаря переменной кривизне, увеличивающейся к периферии,производит сепарацию стеблей с плодами и без них. При встрече с крупными ветвями палец 4 прогибается и обходит их.
Повышение эффективности в сравнении с прототипом достигается, во-первых, за счет того, что гибкий палец 4, вращаясь в горизонтальной или близкой к ней плоскости, создает зону действия в несколько раз большую, чем прототип. Во-вторых, исключается возможность удара и разрушения плода.
Формула изобретения Рабочий орган для съема плодов, содержащий установленные на стреле встряхивающие элементы в виде вертикальных стержней, на свободных концах которых размещены поперечные улавливающие пальцы, и привод, отличающийся тем, что, с целью повышения эффективности работы, каждый улавливающий палец закреплен на стержне своей средней частью, а на его концах выполнены дугообразные зацепы, направленные вогнутой частью в противоположные стороны.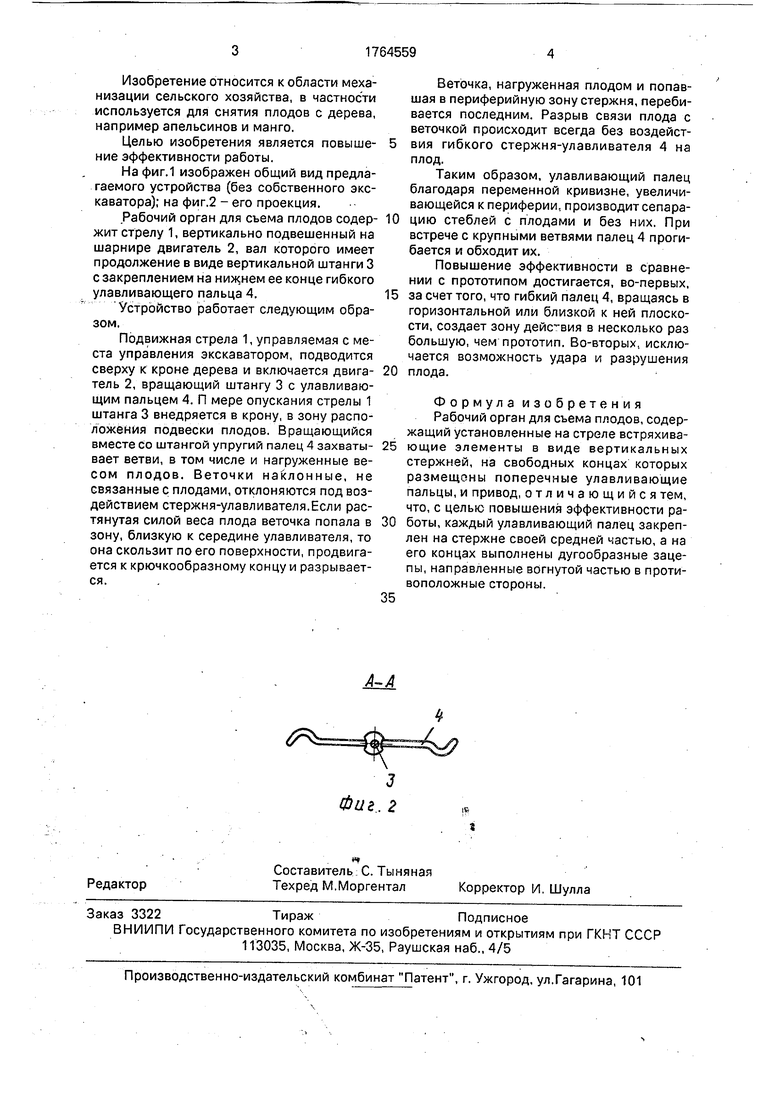
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сбора плодов | 1980 |
|
SU938814A1 |
| УСТРОЙСТВО для СБОРА ПЛОДОВ | 1972 |
|
SU351505A1 |
| УЛАВЛИВАТЕЛЬ ПЛОДОВ | 1973 |
|
SU398220A1 |
| Машина для уборки плодов | 1980 |
|
SU1037870A1 |
| Плодоуборочная машина | 1979 |
|
SU990124A1 |
| УЛАВЛИВАТЕЛЬ ПЛОДОВ | 1971 |
|
SU320266A1 |
| УСТРОЙСТВО ДЛЯ СБОРА ПЛОДОВ | 1973 |
|
SU376058A1 |
| Стряхиватель плодов | 1990 |
|
SU1802995A1 |
| Приспособление для съема плодов с деревьев | 1981 |
|
SU948329A1 |
| Улавливатель плодов | 1973 |
|
SU452311A1 |
Изобретение относится к области механизации сельского хозяйства и м.б. использовано для снятия плодов с дерева, например цитрусовых, Целью изобретения является повышение эффективности и качества механизированной уборки плодов. Подвижная стрела 1, управляемая с места У управления экскаватором, подводится сверху к кроне дерева и включается двигатель 2, вращающий штангу Зс улавливающим пальцем 4. По мере опускания стрель, 1 штанга 3 внедряется в крону, в зону расположения подвески плодов. Вращающийся вместе со штангой упругий улавливающий палец 4 захватывает ветви, втом числе и нагруженные весом плодов, при этом веточки наклонные, не связанные с плодами, отклоняются под воздействием стержня-улавливателя, а нагруженные силой тяжести плода или перебиваются, или разрываются. Если растянутая силой веса плода веточка попала в зону, близкую к середине пальца 4, то она скользит по его поверхности, продвигается к крючкообразному концу и разрывается. 2 ил. (Л с
| Волноводное окно | 1968 |
|
SU270089A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
