1
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для сбора плодов.
Известны улавливатели, состоящие из бесконечного приводного элемента с закрепленными на нем отдельными приемными желобами. Приводной элемент имеет наклонные в горизонтальной плоскости участки, облегчающие внедрение и выход раббчих органов соответственно в крону и из нее. При движении агрегата ковши или желоба внедряются в крону и улавливают стряхиваемые плоды.
Недостатками таких улавливателей являются радиальное расположение желобов в местах перегиба тяговых элементов (при внедрении в крону и выходе из нее) и наличие окружной скорости, причем разной на разных участках желобов. Это приводит к деформации ветвей привходе рабочих органов в крону и выходе из нее, потере плодов и ягод, и не всегда желоба свободно внедряются в Крюны.
Цель изобретения - снижение потерь 1ш1одов. Это достигается тем, что улавливатель снабжен дополнительным бесконечным гибким приводным элементом, смещенным относительно первого по горизонтали и вертикали и шарнирно связанным с ним посредством звеньев коленообразной формы. При этом желоба закреплены на звеньях под углом к горизонтальной плоскости.
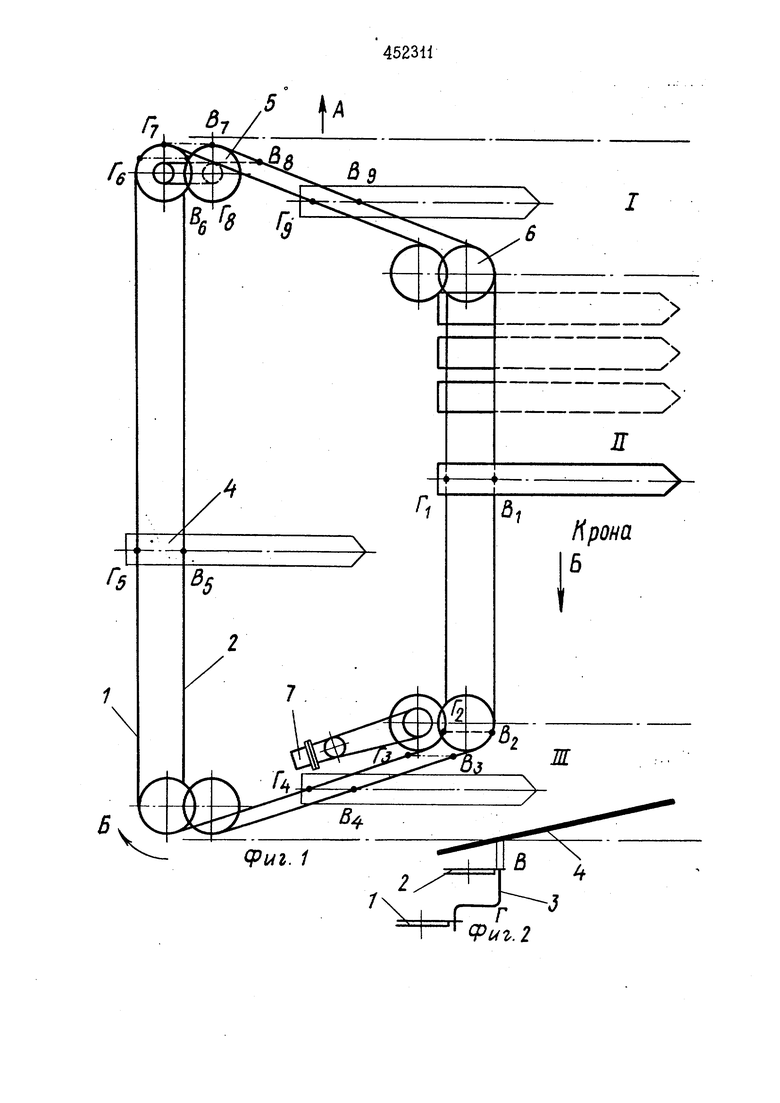
На фиг. 1 изображен предлагаемый улавливатель, вид сверху: на фиг. 2 - то же, вид сзади.
К верхнему 1 и нижнему 2 тяговым бесконечным элементам шарнирно прикреплены коленообразные стойки 3 с желобами 4. Тяговые элементы сдвинуты один относительно другого по горизонтали и вертикали и имеют наклонные (в горизонтальной плоскости) участки (зоны I и Ш) для облегчения внедрения желобов в крону и выхода из нее. Стойки 3 щарнирно связаны с верхним и нижним тяговыми элементами. Желоба 4 к стойкам присоединены наклонно под углом, обеспечивающим скатывание плодов и свободное перемещение желобов один под другим Н.1 участках внедрения в крону и выхода из нее. Скорость движения верхнего и нижнего тяговых рЭлемеНтов синхронна, что достигается блокировкой их че рез передачу от привода 5 (например гидродвигателя или ходовых колес). Ведущие 6 и ведомые 7 устройства нижнего тягового элемента 2 смещены строго на одинаковую величину по отношению к таким же устройствам верхнего тягового элемента на величину, равную размеру колена стойки 3. Расстояние между желобами выбрано из условия прохода между ними ветвей кроны и исключения проскакивания плодов, причем их верхняя часть покрыта мягким материалом. Улавливатель работает следующим образом. Агрегат движется в междурядье сада по стрелке А (фиг. 1), а направление движения тяговых элементов происходит по стрелке Б. Тяговые элементы перемещают коленообразные стойки 3 вместе с желобами 4. При этом колена стоек 3 занимают строго ориентированное положение. Точки В и Г присоединения стойки к нижнему тяговому элементу 2 и верхнему 1 соответственно последовательно занимают положения В, В, Вд и т. д. и Г., Г, Гд и т. д таким образом, желоба на любом участке контура всегда направлены в сторону кроны. В зоне 1 они поступательно (без ок- ружной скорости; внедряются в крону, а в зоне Ш - выходят из нее. Зона II является рабочей, т. е. желоба находятся в кроне и улавливают плоды. Ввиду разного направления движения агрегата и желобов в рабочей зоне, скорость желобов в кроне относительно ветвей равна, нулю. Наклонное положение желобов обеспечивает перемещение по ним плодов за пределы кроны без прохождения их по вертикали через всю крону. Поярусное расположение таких улавливателей снижает количество плодов, соударяемых с ветвями и друг с другом. После выхода в зоне Ш из кроны желоба свободно перемещаются к участку внедрения в крону, т. е. в зону Т. Предмет изобретения 1. Улавливатель плодов, включающий бесконечный гибкий приводной элемент с закрепленными на нем отдельными приемными желобами, отличающийся тем, что, с целью снижения потерь плодов, он снабжен дополнительным бесконечным гибким приводным элементом, смещенным относительно первого по горизонтали и вертикали и шарнирно связанным с ним посредством звеньев коленообразной формы. 2. Улавли1вател1ь по п, 1, отличающийся тем, что желоба закреплены на звеньях под углом к горизонтальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Улавливатель к плодоуборочным машинам | 1978 |
|
SU709029A2 |
| УСТРОЙСТВО для СБОРА ПЛОДОВ | 1972 |
|
SU351505A1 |
| Машина для сбора плодов | 1978 |
|
SU665847A1 |
| Улавливатель ягодоуборочной машины | 1987 |
|
SU1508991A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1971 |
|
SU297343A1 |
| УЛАВЛИВАТЕЛЬ К ЯГОДОУБОРОЧНЫМ МАШИНАМ | 1972 |
|
SU350433A1 |
| Устройство инженера Лаукарта В.Ф. для выкапывания картофеля | 1984 |
|
SU1269760A1 |
| Машина для уборки ягод | 1977 |
|
SU665846A1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ ЗАРУБНОЙ КОНВЕЙЕР | 2014 |
|
RU2574090C1 |
| Рабочий орган для съема плодов | 1990 |
|
SU1764559A1 |