1
(21)4875587/08
(22) 19.10.90
(46) 30.09.92. Бюл. № 36
(71)Московский институт электронного машиностроения
(72)Е.Н.Ивашов
(56)Авторское свидетельство СССР кл. В 25 J 11/00, 1989.
(54) ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ
(57)Использование: область машиностроения, а более конкретно исполнительные устройства манипуляторов и технологического оборудования. В каждой из шести кинематических цепей привода выходного звена имеется коническая передача, помещенная в корпусе, который связан с основанием посредством опорных подшипников, а также два электромагнитных устройства диск-электромагнит, где первый электромагнит жестко закреплен на основании, а на корпусе с возможностью осевого перемещения установлен соответствующий ему первый металлический диск из магнитомяг- кого материала, на крышке корпуса закреплен второй электромагнит, на входном валу конической передачи или на валу электродвигателя с возможностью осевого перемощения установлен второй металлический диск из магнитомягкого материала. Включением того или иного электромагнита обеспечивают пространственное перемещение /-образного выходного элемента 3 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ МЕТАЛЛИЧЕСКОЙ ЛЕНТЫ ПУТЕМ ГИБКИ | 2004 |
|
RU2290274C2 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
| УСИЛИТЕЛЬ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2389924C2 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2032118C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ МИНИ-ПРИВОД УПРАВЛЕНИЯ ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА С ФУНКЦИЕЙ СКЛАДЫВАНИЯ И РАСКРЫТИЯ СЕКЦИИ КРЫЛА | 2014 |
|
RU2565861C1 |
Изобретение относится к области машиностроения, а более конкретно к исполнительным устройствам манипуляторов и технологического оборудования.
Известно l-координальное исполнительное устройство, содержащее основание, выходное звено и приводы для регулирования расстояния между заданными точками основания и выходного звена в виде шести основных кинематических цепей, каждая из которых связана с электродвигателем и включает в себя ведомые звенья, выполненные в виде стержней, связанных сферическими шарнирами с выходным звеном.
Недостатком аналога являются малые кинематические возможности в виде ограниченности движения стержней.
Наиболее близкой по технической сущности и достигаемому результату является 1-координатное исполнительное устройство манипулятора, содержащее основание, выходное звено и приводы для регулирования расстояния между заданными точками основания и выходного звена в виде шести кинематических цепей, каждая из которых связана с электродвигателем и включает в себя ведомые звенья, каждый стержень связан сферическим шарниром с диском, соединенным с электродвигателем, причем сферический шарнир установлен на периферии диска.
Недостатком прототипа являются малые кинематические возможности, так как каждый стержень соединен с электродвигателем шарниром установленным на периферии диска, причем шарнир перемещается только в одной плоскости.
Цель изобретения - расширение кинематических возможностей исполнительного устройства.
Поставленная цель достигается тем, что каждый стержень шарнирно связан с-Г-об- разной осью, установленной на выходном
VJ
О
ь ю
00
XI
валу конической передачи, помещенной в корпусе, который связан с основанием посредством опорных подшипников, на выступе основания жестко закреплен первый электромагнит, а на корпусе с возможностью только осевого перемещения установлен первый металлический диск из магнитомягкого материала, развязанный от первого электромагнита упругим элементом, выполненным в виде лепестковой тарельчатой пружины, один конец которой закреплен на корпусе, а другой взаимодействует с первым металлическим диском, на крышке корпуса закреплен второй электромагнит, а на входном валу конической передачи с возможностью только осевого перемещения установлен второй металлический диск из магнитомягкого материала, развязанный от второго электромагнита также упругим элементом, выполненным в виде лепестковой тарельчатой пружины, один конец которой закреплен на крышке, а другой выполнен с возможностью контактного взаимодействия с торцовой поверхностью второго металлического диска, а внутри основания установлен электродвигатель, связанный с входным валом конической передачи.
Введение в L-координатное исполнительное устройство.Г-образной оси, конической передачи,электромагнитов, дисков из магнитомягкого материала, упругих элементов в виде лепестковых тарельчатых пружин, обеспечивает вращение / -образной оси как относительно вертикальной, так и горизонтальной X Y-оси, что и позволяет достичь указанную в формуле изобретения цель - расширение кинематических возможностей исполнительного устройства.
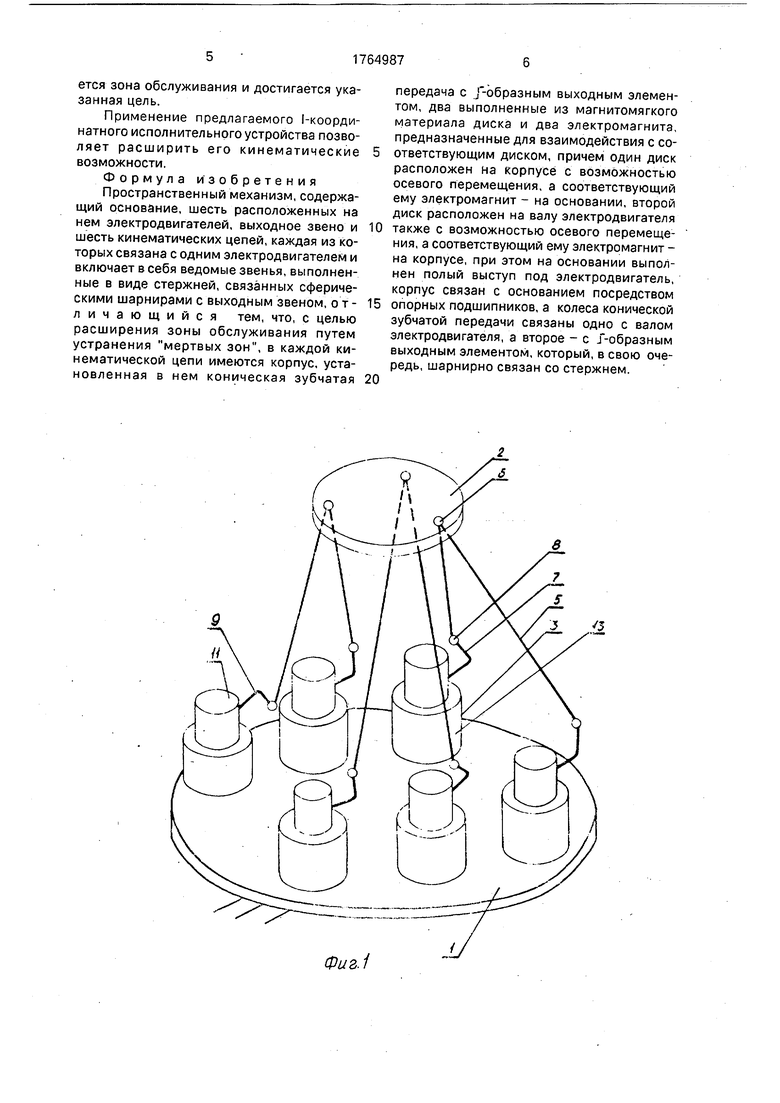
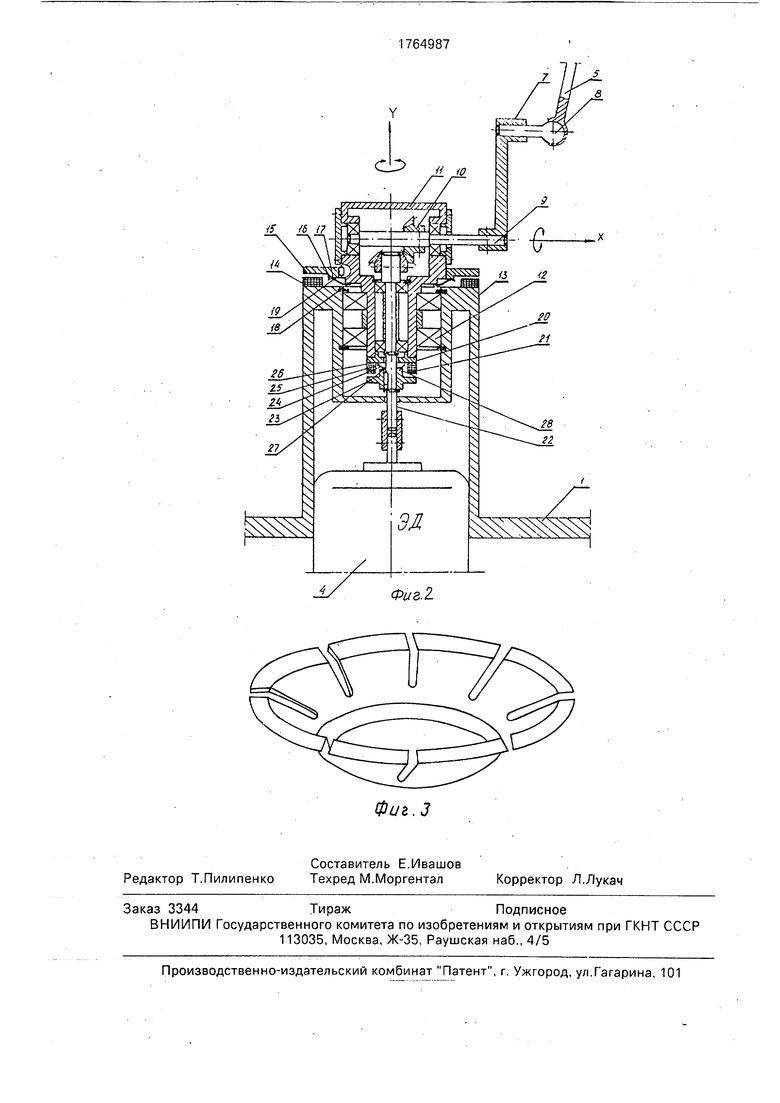
На фиг.1 - показан общий вид 1-коорди- натного исполнительного устройства; на фиг.2 - вертикальный разрез конической передачи и выступа основания; на фиг.З - лепестковая тарельчатая пружина.
L-координальное исполнительное устройство (фиг.1) содержит основание 1, выходное звено 2, приводы 3 для регулирования расстояния между заданными точками основания 1 и выходного звена 2 в виде шести кинематических цепей, каждая из которых связана с электродвигателем 4 и включает в себя ведомые звенья, выполненные в виде стержней 5, связанных сферическими шарнирами 6 с выходным звеном 2.
Каждый стержень 5 шарнирно связан cj-образной осью 7 посредством шарниров 8, которая установлена на выходном валу 9 конической передачи 10, помещенной в корпусе 11, который связан с основанием 1
посредством опорных подшипников 12 (фиг.2). На выступе 13 основания 1 жестко закреплен первый электромагнит 14, а на корпусе 11с возможностью только осевого
перемещения установлен первый металлический диск 15 из магнитомягкого материала, развязанный от первого электромагнита 14 упругим элементом 16, выполненным в виде лепестковой тарельчатой пружины 17,
один конец 18 которой закреплен на корпусе 11, а другой 19 взаимодействует с первым металлическим диском 15. На крышке 20 корпуса 11 закреплен второй электромагнит 21 (фиг.2), а на входном валу 22 конической
передачи 10с возможностью только осевого перемещения установлен второй металлический диск 23 из магнитомягкого материала, развязанный от второго электромагнита 21 также упругим элементом 24, выполненным в виде лепестковой тарельчатой пружины 25, один конец которой 26 закреплен на крышке 20, а другой 27 выполнен с возможностью контактного взаимодействия с торцовой поверхностью 28 второго металлического диска 23. Внутри выступа 13 основания 1 установлен электродвигатель 4, связанный с входным валом 28 конической передачи 10.
--координатное исполнительное устройство (фиг.1, 2) работает следующим образом.
При включении первого электромагнита 14 первый металлический диск 15 из магнитомягкого материала прижимается к
электромагниту 14. Корпус 11 жестко фиксируется относительно выступа 13 основания 1. Тогда при вращении электродвигателя 4 начинает вращаться входной 22 и выходной 9 валы конической передачи 10. При
этом Г-образная ось 7 вращается в вертикальной плоскости относительно горизонтальной оси X (1-я степень подвижности),
При включении второго электромагнита 21 (первый электромагнит 14 отключен)
второй металлический диск 23 из магнитомягкого материала прижимается к электромагниту 21. Входной вал 22 конической передачи 10 жестко фиксируется относительно корпуса 11. Тогда при вращении
электродвигателя 4 начинает вращаться входной вал 22 совместно с корпусом 11 в опорах 12.
При этом Г-образная ось 7 вращается относительно вертикальной оси Y, переходящей через входной вал 22 (2-я степень подвижности).
Таким образом j-образная ось 7 вращается как относительно горизонтальной, так и вертикальной осей, за счет чего расширяется зона обслуживания и достигается указанная цель.
Применение предлагаемого 1-коорди- натного исполнительного устройства позво- ляет расширить его кинематические возможности.
Формула изобретения Пространственный механизм, содержащий основание, шесть расположенных на нем электродвигателей, выходное звено и шесть кинематических цепей, каждая из которых связана с одним электродвигателем и включает в себя ведомые звенья, выполненные в виде стержней, связанных сферическими шарнирами с выходным звеном, о т - личающийся тем, что, с целью расширения зоны обслуживания путем устранения мертвых зон, в каждой кинематической цепи имеются корпус, установленная в нем коническая зубчатая
Фиг.1
передача с / -образным выходным элементом, два выполненные из магнитомягкого материала диска и два электромагнита, предназначенные для взаимодействия с соответствующим диском, причем один диск расположен на корпусе с возможностью осевого перемещения, а соответствующий ему электромагнит - на основании, второй диск расположен на валу электродвигателя также с возможностью осевого перемещения, а соответствующий ему электромагнит - на корпусе, при этом на основании выполнен полый выступ под электродвигатель, корпус связан с основанием посредством опорных подшипников, а колеса конической зубчатой передачи связаны одно с валом электродвигателя, а второе - с Т-образным выходным элементом, который, в свою очередь, шарнирно связан со стержнем.
IS
Фиг 2.
