1
(21)4361851/03 (22)07.01.88 (46)30.09.92. Бюл. №36
(71)Азербайджанский научно-исследовательский и проектно-конструкторский институт нефтяного машиностроения
(72)Н.Г.Курбанов, Л.И.Якубович и В.А.Гире- ев
(56) Авторское свидетельство СССР № 204271, кл. Е21 В 7/02. 1966.
Патент США №3613905, кл. 214-2.5, опубл. 1971.
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ТРУБ МЕЖДУ СТЕЛЛАЖАМИ И УСТЬЕМ СКВАЖИНЫ
(57) Сущность изобретения: между разновысокими рабочими площадками установлена поворотная в вертикальной плоскости стрела. На стреле установлена подвижная вдоль стрелы каретка с приводом, захватный узел установлен шарнирно на каретке и имеет кулачок. На стреле закреплен отклонитель. На захватном узле размещены упоры угла поворота. На каретке захватный узел установлен с возможностью поочередного взаимодействия упором с ограничителем и кулачком с отклонителем. Устройство позволяет работать с трубами разной длины. 2 ил.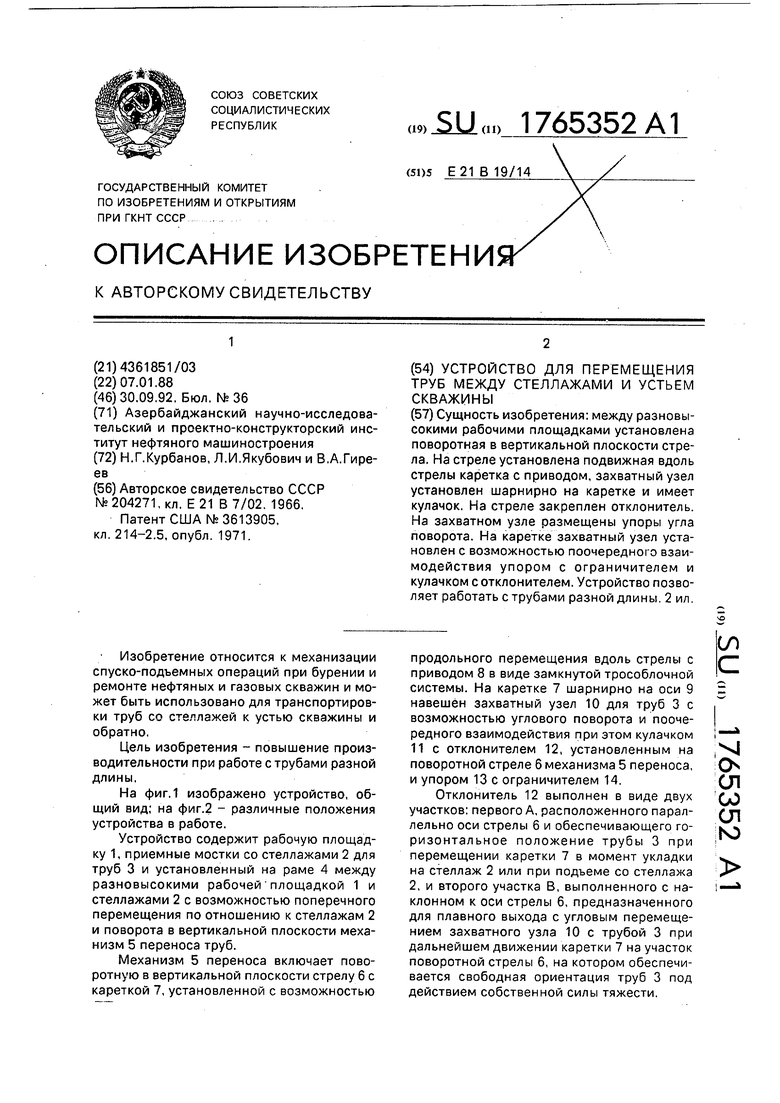

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный стеллаж для хранения и выдачи изделий | 1981 |
|
SU1028567A1 |
| Механизированный стеллаж для горизонтальной укладки скважинных труб | 1980 |
|
SU901463A1 |
| Автоматический агрегат для ремонта скважин,мостки,автоматический ключ | 1980 |
|
SU1141180A1 |
| Устройство для перемещения труб на мостках | 1987 |
|
SU1465538A1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2000 |
|
RU2170325C1 |
| Механизированный стеллаж для горизонтальной укладки скважинных труб | 1980 |
|
SU901462A1 |
| Автоматизированное устройство для разгрузки стеллажей | 2015 |
|
RU2680879C2 |
| УСТРОЙСТВО для ЗАГРУЗКИ СТЕРЖНЕЙ В МЕЛЬНИЦУ | 1970 |
|
SU277527A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |

Изобретение относится к механизации спуско-подъемных операций при бурении и ремонте нефтяных и газовых скважин и может быть использовано для транспортировки труб со стеллажей к устью скважины и обратно.
Цель изобретения - повышение производительности при работе с трубами разной длины,
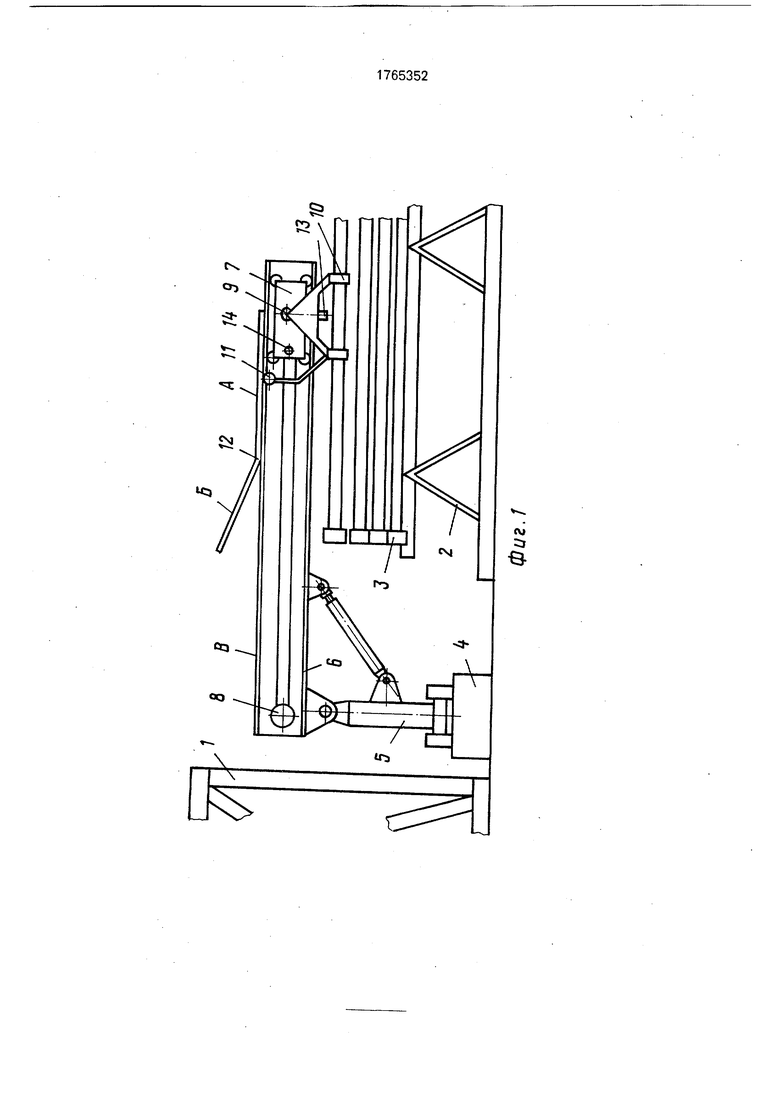
На фиг.1 изображено устройство, общий вид; на фиг.2 - различные положения устройства в работе.
Устройство содержит рабочую площадку 1, приемные мостки со стеллажами 2 для труб 3 и установленный на раме 4 между разновысокими рабочей площадкой 1 и стеллажами 2 с возможностью поперечного перемещения по отношению к стеллажам 2 и поворота в вертикальной плоскости механизм 5 переноса труб.
Механизм 5 переноса включает поворотную в вертикальной плоскости стрелу 6 с кареткой 7, установленной с возможностью
продольного перемещения вдоль стрелы с приводом 8 в виде замкнутой трособлочной системы. На каретке 7 шарнирно на оси 9 навешен захватный узел 10 для труб 3 с возможностью углового поворота и поочередного взаимодействия при этом кулачком 11с отклонителем 12, установленным на поворотной стреле 6 механизма 5 переноса, и упором 13 с ограничителем 14.
Отклонитель 12 выполнен в виде двух участков: первого А, расположенного параллельно оси стрелы 6 и обеспечивающего го- ризонтальное положение трубы 3 при перемещении каретки 7 в момент укладки на стеллаж 2 или при подъеме со стеллажа 2, и второго участка В, выполненного с наклонном к оси стрелы 6, предназначенного для плавного выхода с угловым перемещением захватного узла 10 с трубой 3 при дальнейшем движении каретки 7 на участок поворотной стрелы 6, на котором обеспечивается свободная ориентация труб 3 под действием собственной силы тяжести.
СП
с
,VI о ел со ел ю
На захватном узле 10 расположен упор 13, а на каретке 7 ограничитель 14 угла поворота захватного узла 10, установленные с возможностью взаимодействия между собой в момент прекращения контакта кулач- ка 11 с участком В отклонителя 12. При этом упор 13 и ограничитель 14 лежат на дуге поворота захватного узла 10 и определяют максимальный угол наклона трубы к пред- устьевой рабочей площадке 1.
Устройство работает следующим образом.
Механизм 5 переноса труб 3 размещают на раме 4, установленной между рабочей площадкой 1 и приемным мостком со стел- лажами 2 труб 3. Поворотная стрела 6 механизма 5 переноса устанавливается на высоту, обеспечивающую прохождение захватного узла 10 над верхним рядом труб 3. При этом каретка 7 с помощью привода (тро- соблочной системы) 8 отведена на конец поворотной стрелы 6. Поворотную стрелу 6 подводят к положение, при котором захватный узел 10 будет зависать над очередной трубой 3. Затем опускают стрелу 6, произ- водят захват трубы 3 захватным узлом 10 в неуравновешенном положении, что также значительно упрощает и ускоряет работы при трубах разной длины.
Поворачивают стрелу 6 против часовой стрелки, вместе с ней поднимается захватный узел 10 с зажатой трубой 3.
При дальнейшем угловом повороте стрелы 6 из-за неуравновешенности захваченной трубы 3, она поворачивается вместе с захватным узлом 10 по часовой стрелке до тех пор, пока кулачок 11 захватного узла 10 не начнет взаимодействовать с прямолинейным участком А отклонителя 12. Это обеспечивает положение трубы 3 парал- лельно стреле 6, вследствие чего труба 3 при подъеме или при укладке перемещается параллельно горизонтальной плоскости стеллажа 2 и при небольшом угле поворота стрелы 6 труба 3 отрывается от настила, а конец ее не касается мостков, чем обеспечивается сохранность наружной резьбы.
Одновременно с вертикальным поворотом стрелы б вдоль нее в сторону рабочей площадки 1 начинает перемещаться карет- ка 7 с трубой 3 в захватном узле 10. При этом пока кулачок 11 взаимодействует с прямолинейным участком А отклонителя 12,труба 3 в захватном узле 10 сохраняет почти гори
зонтальное положение. При дальнейшем вертикальном повороте стрелы и перемещении каретки 7 кулачок 11 достигает отклоняющего участка Б отклонителя 12, и захватный узел 10 с трубой 3 принимает наклонное положение. В момент прекращения контакта кулачка 11 с участком Б отклонителя 12 угловое положение трубы 3 определяется вступающими во взаимодействие между собой упором 13 и ограничителем 14 угла наклона (см. фиг.2, положение I).
Дальнейший поворот захватного узла 10с перемещаемой трубой 3 относительно поворотной стрелы 6 прекращается.
Перемещение захватного узла 1 с трубой 3 по участку В в сторону рабочей площадки 1 с одновременным вертикальным поворотом механизма 5 переноса будет продолжаться до тех пор, пока перемещаемая труба 3 одним концом не ляжет на приемный мост, а другим - на рабочую площадку 1 (см. фиг.2, положения II и III). Затем освобождают трубу 3 от захватного узла 10 и механизм 5 переноса возвращается за очередной трубой 3. Перемещение трубы 3 от рабочей площадки 1 на стеллаж 2 производится в обратной последовательности.
Формула изобретения
Устройство для перемещения труб между стеллажами и устьем скважины, включ а- ющее механизм переноса, выполненный в виде стрелы с навешенным шарнирно захватным узлом, установленной между разновысокими рабочей площадкой и стеллажами с возможностью поворота в вертикальной плоскости, привод поворота стрелы и отклонитель захватного узла, отличающееся тем, что, с целью повышения производительности при работе с трубами разной длины, оно снабжено кареткой с приводом, ограничителем угла поворота захватного узла, упором и кулачком, при этом каретка установлена на стреле с возможностью перемещения под действием привода вдоль стрелы, ограничитель угла поворота захватного узла размещен на каретке, упоры и кулачок закреплены на захватном узле, отклонитель установлен на стреле, а захватный узел установлен на каретке с возможностью поочередного взаимодействия упором с ограничителем и кулачком с отклоните- лем.
1765352
фиг.2
