Предлагаемый датчик загрузки двигателя относится к технике измерения параметров, аварийно-предупредительной сигнализации и защиты двигателя внутреннего сгорания, например дизеля.
Изобретение может быть использовано в силовых дизельных установках (в частности, судовых), вспомогательных дизельных установках, а также ъ других энергетических установках, в которых двигатели нагружены нагружающим устройством (например, гребным винтом регулируемого шага), изменение нагрузки двигателя с помощью которого осуществляется системой управления нагружающим устройством (например, системой управления ВРШ).
При этом в подобных установках возможно снижение ресурса двигателя как из- за возникновения перегрузки двигателя по причине изменения внешних условий окружающей среды (температуры, давления воздуха, встречного ветра и т.п.), так и по причине ошибочных действий оператора.
который, управляя нагружающим двигатель устройством (например, для поддержания необходимой скорости, нагрузки и т.п.), перегружает двигатель в различных режимах его эксплуатации,
Изобретение может быть реализовано в установках с дизелями, оборудованными датчиком частоты вращения (тахометром), датчиком крутящего момента (гидравлическим динамометром), датчиком загрузки двигателя по авт. св. № 1649316,
К таким двигателям относятся, например, дизели марок М503Б, М503М, М513, ДРА-210идр.
Предлагаемое изобретение является усовершенствованием известного устройства, описанного в авт. ев, СССР № 1649416.
Известный датчик загрузки двигателя содержит двигатель с датчиком частоты вращения и датчиком крутящего момента, преобразователь генерирования сигнала по крутящему моменту, связанный входом с выходом датчика крутящего момента, а выXI
О
сл XI го
5
го
ходом - с первым входом блока сравнения, второй вход которого связан с выходом датчика частоты вращения, датчик температуры выхлопных газов, блок сравнения сигналов по крутящему моменту, блок срав- нения сигналов по температуре выхлопных газов, программный задатчик сигналов по температуре выхлопных газов и элемент ИЛИ, один из входов которого подключен к выходу блока сравнения сигналов по крутя- щему моменту, а второй - к выходу блока сравнения сигналов по температуре выхлопных газов, при этом вход датчика температуры выхлопных газов связан с двигателем, а выход-с первым входом блока сравнения по температуре выхлопных га- зов, второй вход которого связан с выходом программного задатчика сигналов по температуре выхлопных газов, подключенного входом к выходу датчика частоты вращения.
Недостатком известного датчика за- грузки двигателя является то, что он при наличии (при возникновении) перегрузки двигателя генерирует на выходе единичный сигнал, только сигнализирующий оператору о наличии перегрузки, не снимая при этом эту перегрузку двигателя автоматически (т.е. без участия оператора) за достаточно малый промежуток времени. Работа же любого двигателя с перегрузкой за весь период его эксплуатации (за весь его ресурс) строго ограничена по времени, причем весьма малыми (по сравнению с ресурсом) величинами.
Целью дополнительного изобретения является повышение надежности и долго- вечности двигателя путем автоматического снятия его перегрузки.
Поставленная цель достигается тем, что в датчик загрузки двигателя по авт. св. СССР № 1649316 введены потребитель ме- ханической энергии двигателя, блок управ- ления и блок задания командного сигнала величины нагрузки крутящего момента, подключенный к первому входу блока управления, второй вход которого связан с выходом элемента ИЛ И, а выход-со входом потребителя механической энергии двигателя.
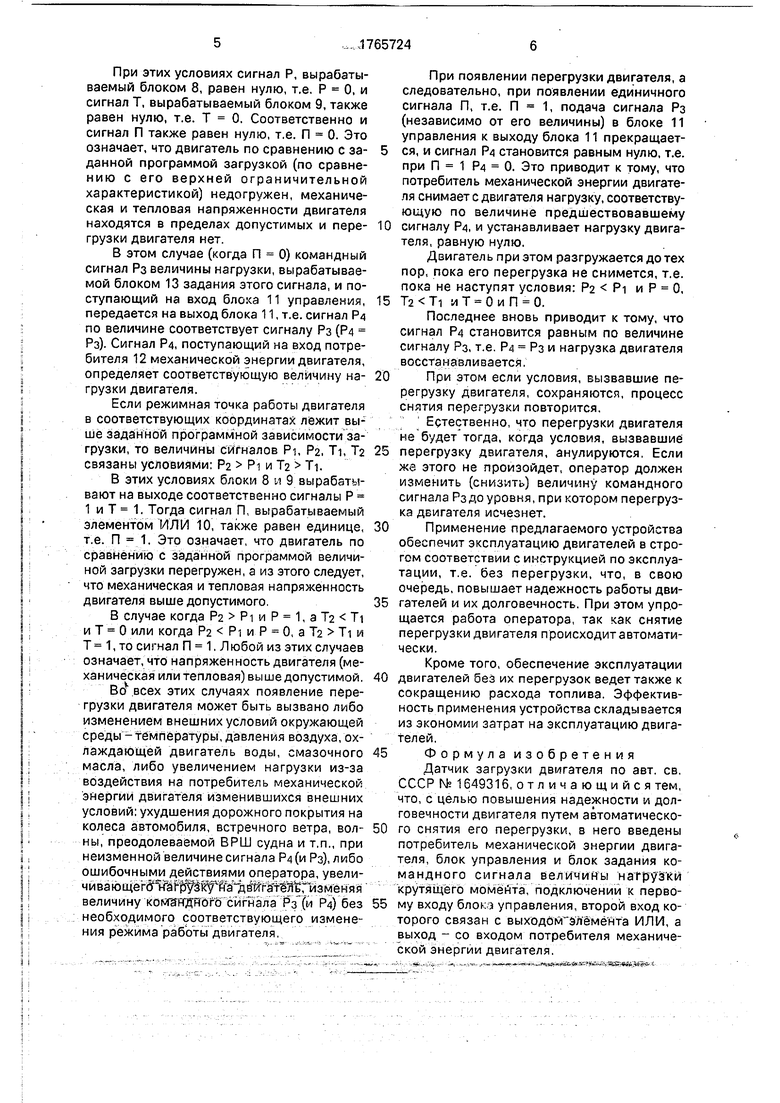
На чертеже изображена схема датчика загрузки двигателя.
Двигатель 1 имеет датчик 2 частоты вращения, датчик 3 крутящего момента, датчик 4 температуры выхлопных газов (ТВГ).
Выход датчика 2 соединен с входом программного задатчика 5 сигнала Pi, вели- чина которого соответствует заданной программой загрузки величине крутящего момента, и с входом программного задатчика 6 сигнала Ti ТВГ, величина которого соответствует заданной программой загрузки величине ТВГ.
Выход датчика 3 соединен с входом преобразователя 7 для генерирования сигнала 2 по крутящему моменту и подачи его к блоку 8 сравнения сигналов.
Блок 8 сравнения выходных сигналов программного задатчика 5 (Pi) и преобразователя 7 (Ра) генерирует на выходе еди- ничный сигнал Р при превышении величины сигнала Р2 над величиной сигнала PL
Выход программного задатчика 6, вырабатывающего выходной сигнал Ti, соединен с одним из двух входов блока 9 сравнения выходных сигналов программного задатчика 6 (Ti) ТВГ и датчика 4 (Та) ТВГ. Второй вход блока 9 соединен с выходом датчика 4.
Блок 9 генерирует на выходе единичный сигнал Т при превышении сигнала Та над величиной сигнала TL
Выход блока 8 соединен с одним из двух входов элемента 10 ИЛИ, второй вход которого соединен с выходом блока 9.
Элемент 10 генерирует на выходе единичный сигнал П при наличии единичного сигнала хотя бы на одном из его входов (Р или Т).
Выход элемента 10 подключен к одному из двух входов блока 11 управления системы управления потребителем 12 механической энергии двигателя.
Другой вход блока 11 соединен с выходом блока 13 задания командного сигнала величины нагрузки Рз - крутящего момента, развиваемого двигателем, величина которого задается оператором.
Выход блока 11, на котором генерируется сигнал FM, равный по величине либо входному сигналу Рз, при отсутствии сигнала П (П 0) на втором его входе, либо равный нулю при наличии единичного сигнала П (П 1) на втором его входе, соединен с потребителем 12 механической энергии двигателя, кинематически соединенным с двигателем.
Предлагаемый датчик загрузки работает следующим образом.
Если точка, характеризующая режим работы двигателя в координатах Крутящий момент - частота вращения или в координатах Температура выхлопных газов - частота вращения лежит ниже заданной программной зависимости загрузки - верхней ограничительной характеристики двигателя, то величины сигналов Pi, Pa, Ti, Та связаны условиями:
PI Pi и .
При этих условиях сигнал Р, вырабатываемый блоком 8, равен нулю, т.е. Р 0, и сигнал Т, вырабатываемый блоком 9, также равен нулю, т.е. Т 0. Соответственно и сигнал П также равен нулю, т.е. П 0. Это означает, что двигатель по сравнению с заданной программой загрузкой (по сравнению с его верхней ограничительной характеристикой) недогружен, механическая и тепловая напряженности двигателя находятся в пределах допустимых и перегрузки двигателя нет.
В этом случае (когда П 0) командный сигнал Рз величины нагрузки, вырабатываемой блоком 13 задания этого сигнала, и поступающий на вход блока 11 управления, передается на выход блока 11, т.е. сигнал Р по величине соответствует сигналу Рз (Р4 Рз). Сигнал Р4, поступающий на вход потребителя 12 механической энергии двигателя, определяет соответствующую величину нагрузки двигателя.
Если режимная точка работы двигателя в соответствующих координатах лежит выше заданной программной зависимости загрузки, то величины сигналов Pi, Pz, П, Та связаны условиями: Ра Pi и Т2 Тт.
В этих условиях блоки 8 и 9 вырабатывают на выходе соответственно сигналы Р 1 и Т 1. Тогда сигнал П, вырабатываемый элементом ИЛИ 10, также равен единице, т.е. П 1. Это означает, что двигатель по сравнению с заданной программой величиной загрузки перегружен, а из этого следует, что механическая и тепловая напряженность двигателя выше допустимого
В случае когда PZ Рч и Р 1, a Jz Ti и Т 0 или когда PZ Pi и Р 0, а Т2 Ti и Т 1, то сигнал П 1. Л юбой из этих случаев означает, что напряженность двигателя (механическая илитепловая) выше допустимой.
Во всех этих случаях появление перегрузки двигателя может быть вызвано либо изменением внешних условий окружающей среды - температуры, давления воздуха, охлаждающей двигатель воды, смазочного масла, либо увеличением нагрузки из-за воздействия на потребитель механической энергии двигателя изменившихся внешних условий: ухудшения дорожного покрытия на колеса автомобиля, встречного ветра, волны, преодолеваемой ВРШ судна и т.п., при неизменной величине сигнала Р4(иРз), либо ошибочными действиями оператора, увели- чивающег6 1га р Куай а д§Кга тМьГизменяя величину коматВДТГогЬ сигнала Рз (и Р4) без необходимого соответствующего изменения режима работы двигателя
При появлении перегрузки двигателя, а следовательно, при появлении единичного сигнала П, т.е. П 1, подача сигнала Рз (независимо от его величины) в блоке 11 управления к выходу блока 11 прекращается, и сигнал Рз становится равным нулю, т.е. при П 1 Р4 0. Это приводит к тому, что потребитель механической энергии двигателя снимает с двигателя нагрузку, соответствующую по величине предшествовавшему
сигналу Р4, и устанавливает нагрузку двигателя, равную нулю.
Двигатель при этом разгружается до тех пор, пока его перегрузка не снимется, т.е. пока не наступят условия: 2 Рч и Р О,
иТ 0 и П 0.
Последнее вновь приводит к тому, что сигнал Р4 становится равным по величине сигналу Рз, т.е Р4 Рз и нагрузка двигателя восстанавливается,
При этом если условия, вызвавшие перегрузку двигателя, сохраняются, процесс снятия перегрузки повторится.
Естественно, что перегрузки двигателя не будет тогда, когда условия, вызвавшие
перегрузку двигателя, анулируются, Если же этого не произойдет, оператор должен изменить (снизить) величину командного сигнала Рз до уровня, при котором перегрузка двигателя исчезнет.
Применение предлагаемого устройства обеспечит эксплуатацию двигателей в строгом соответствии с инструкцией по эксплуатации, т е. без перегрузки, что, в свою очередь, повышает надежность работы двигателей и их долговечность. При этом упрощается работа оператора, так как снятие перегрузки двигателя происходитавтомати- чески.
Кроме того, обеспечение эксплуатации
двигателей без их перегрузок ведет также к сокращению расхода топлива. Эффективность применения устройства складывается из экономии затрат на эксплуатацию двигателей.
Формула изобретения
Датчик загрузки двигателя по авт. ев СССР N 1649316, отличающийся тем, что, с целью повышения надежности и долговечности двигателя путем автоматического снятия его перегрузки, в него введены потребитель механической энергии двигателя, блок управления и блок задания командного сигнала величины нагрузки крутящего момейта, подключении к первому входу блo з управления, второй вход которого связан с выходом элемента ИЛИ, а выход - со входом потребителя механической энергии двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик загрузки двигателя | 1989 |
|
SU1649316A1 |
| Устройство для контрля технического состояния двигателя | 1976 |
|
SU664061A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Датчик загрузки двигателя | 1978 |
|
SU723405A1 |
| Устройство управления бункером-перегружателем проходческо-добычного комплекса | 1987 |
|
SU1444515A1 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| Устройство управления загрузкой сыпучих материалов в транспортные средства с помощью телескопических труб | 1977 |
|
SU676520A1 |
| УСТРОЙСТВО ПРОГРАММНОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ПРИГОТОВЛЕНИЯ БЕТОНА I | 1972 |
|
SU349978A1 |
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |
| Устройство к стану для мерной резки проката | 1981 |
|
SU1152728A1 |
Использование: относится к технике измерения параметров двигателя, аварийно- предупредительной сигнализации и защиты двигателя внутреннего сгорания. Сущность изобретения: датчик загрузки двигателя по а.с. СССР Мг 1649316 содержит: двигатель
11
г ,я-т1&Ј 1х5 - 1-с-1
