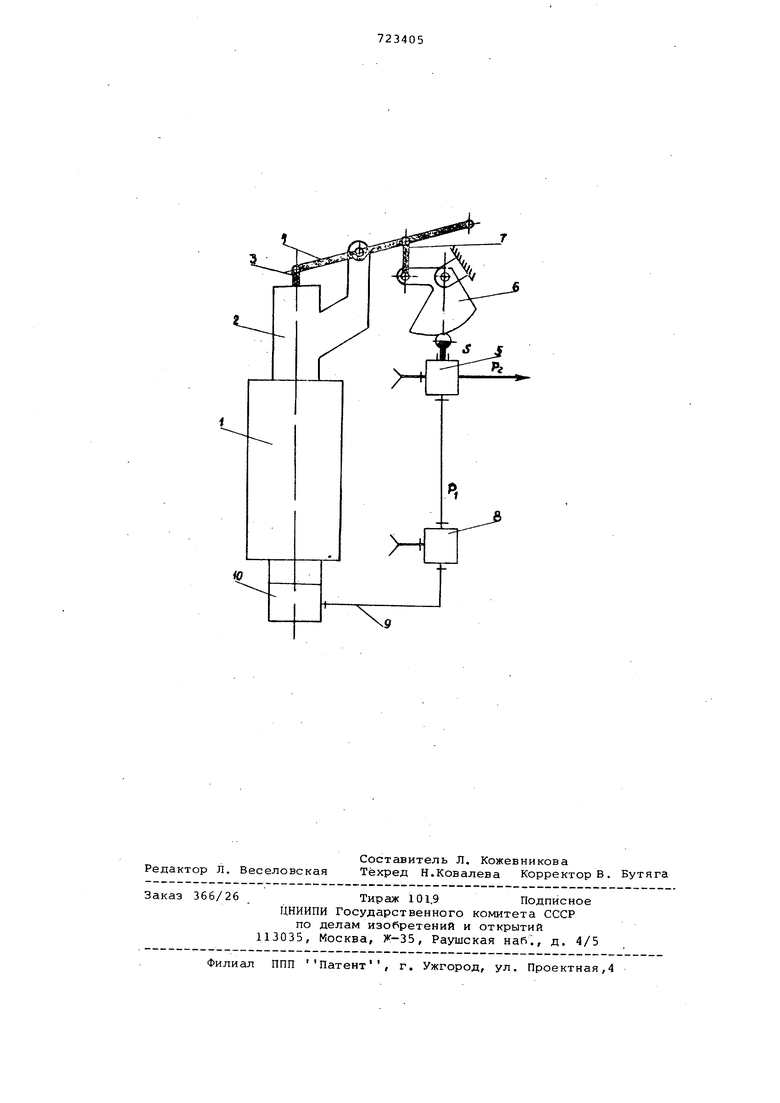
Изобретение относится к измерению параметров двигателя внутреннего сг рания и может быть использовано в ди зельных и энергетических установках загрузка которых должна осуществлят с я по заданной програ1име в функции от оборотов двигателя или от величи хода плунжера предварительной затяж пружины всережимного регулятора обо ротов двигателя. Известен датчик загрузки двигате ля, содержащий всережимный регулято числа оборотов, рычаг управления рейкой топливного насоса, соединенный тягой с ттрограммным-кулачком { Недостатком известного датчика является низкая точность измерения загрузки двигателя. Наиболее близок к предлагаемому по техническому решению датчик загрузки двигателя, содержащий пневматический сумматор с толкателем и программный кулачок, связанный с толкателем пневматического сумматора 12 , Недостаток указанного датчика загрузки заключается в том, что определяет Лишь грубое отклонение фактической загрузки (крутящего момента) от заданной по программе. Цель изобретения - повышение точности измерения загрузки двигателя. Указанная цель достигается тем, что в датчик загрузки двигателя введен пневматический датчик крутящего момента, развиваемого двигателем, выход которого соединен со входом пневматического сумматора, а программный кулачок кинематически связан с плунжером предварительной затяжки пружины всережимного регулятора оборотов двигателя. На чертеже изображена схема датчика загрузки двигателя. Двигатель 1 имеет всережимный регулятор числа оборотов 2 с плунжером 3, предназначенным для изменения предварительной затяжки пружины регулятора, т.е. для задания числа оборотов двигателя. Рычаг 4 управления двигателем, изменяющий ход плунжера регулятора, соединен с пневматическим сумматором 5 с помощью программного кулачка 6 и тяги 7, причем толкатель сумматора находится под кинематическим воздействием программного кулачка. Перемещение S толкателя сумматора 5 является одним из его управля иих аналоговых сигналов, соответствующим заданной величине загрузки дригателя. Вторым аналоговым сигналом, пода ваемым на вход сумматора, является пневматический сигнал PI , вырабатываемый пневматическим датчиком 8 кр тящего момента, соответствующий фак тической загрузке двигателя, т.е. крутящему моменту, развиваемому дви гателем. .. Датчик 8 своим входом (измерител ной камерой) с помощью масляной магистрали 9 соединен с динеи ометром 10, имеющимся на двигателе. При подводе питающего воздуха давлением 1,4 ати пневматически дат чик 8 крутящего момента и пневматический сумматор 5 вырабатывают, соответственно пневматические сигналы Р и Ро в виде переменного .давления воздуха, изменяющегося в пределах 0,2-1,0 ати. Сигнал Р.р подводится к потребите Входные и выходные сигнгшы, подводимые к сумматору, связаны в датчике загрузки следующей формулой Р S - КР I где k - коэффициент пропорциональ ности . Датчик загрузки работает следую щим образом. Если точка, характеризующая режим работы двигателя в координата Крутящий момент - обороты двигателя или в координатах Крутящий момент - ход плунжера всережим ного регулятора , лежит на заданн двигателю программной зависимости рузки от числа оборотов при измене оборотов во всем возможном диапазо то входные сигналы S и Ру, также изменяясь во всем возможном диапаз остаются связанными равенством Pj S - kP, В этом случае Р. S - kP const a, следовательно ,Pg -Pj,(j и выходной сигнал, вырабатываемый су.мматором, остается постоянным. Если точка, характеризующая реж работы двигателя, лежит при любых оборотах выше (или ниже) заданной программой, то РЗ Рд const и, следовательно, Р - чо Йр этом, когда режимная точка лежит выше (или ниже) заданной программой uPg О (или 4 Р СО) Кроме того, чэм выше (или ниже) отстоит режимная точка от заданной программой, тем больше абсолютная величина разности А Р, тем больше отличается величина Р от величины Pjj() const. В двух последних случаях знак и абсолютная величина разности л Рр PJ - РЗО характеризуют направление и величину отклонения фактической нагрузки (крутящего момента), развиваемой двигателем, от вечичины загрузки, заданной двигателю программой загрузки. Применение предлагаемого датчика загрузки обеспечивает высокую точность отработки назкаченной программы загрузки двигателя в процессе его эксплуатации, что приводит к снижению эксплуатационных затрат при управлении двигателем за счет сокращения наобходимости контроля загрузки и автоматизации управления двигателем, увеличения ресурса двигателя, снижения расхода топлива двигателем, а также за счет снижения вероятности возникновения аварии двигателя. Формула изобретения Датчик загрузки двигателя, содержащий пневматический сумматор с толкателем и программный кулачок, связанный с толкателем пневматического сумматора, отличающийс я тем. Что, с целью повышения точности измерения загрузки двигателя, в него введен пневматический датчик прутящего момента, развиваемого двигателем, выход которого соединен со входом пневматического сумматора, а прогтраммный кулачок кинематически связан с плунжером предварительной затяжки пружины всережимного регулятора оборотов двигателя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №265503, кл. G 01 L 3/04, 1957. 2.Авторское свидетельство СССР по заявке I 2504107, кл. G 01 L 3/04, 1977.
«Р

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик загрузки двигателя | 1977 |
|
SU664060A1 |
| Датчик загрузки двигателя | 1978 |
|
SU779835A1 |
| Устройство для контрля технического состояния двигателя | 1976 |
|
SU664061A1 |
| Датчик загрузки | 1965 |
|
SU744257A2 |
| ДАТЧИК ЗАГРУЗКИ | 1970 |
|
SU265503A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, НАПРИМЕР СУДОВОГО ДИЗЕЛЯ | 1966 |
|
SU189184A1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| Устройство для стабилизации скорости движения трактора | 1961 |
|
SU142160A1 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Система дистанционного управления двигателем | 1974 |
|
SU631670A1 |