4 . 4;а
сл
ел
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бункером перегружателем проходческо-добычного комплекса | 1985 |
|
SU1268725A1 |
| Устройство для управления загрузкой бункера-перегружателя проходческо-добычного комплекса | 1983 |
|
SU1176072A1 |
| Устройство автоматического управления горным комбайном | 1983 |
|
SU1155750A1 |
| Привод конвейерной системы для перегрузки горной массы | 1988 |
|
SU1682264A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ РУДНИЧНЫХ КОНВЕЙЕРОВ | 2014 |
|
RU2566324C1 |
| Устройство для автоматического регулирования загрузки бункера-перегружателя | 1985 |
|
SU1268494A1 |
| Способ проходки подземной выработки и система для его осуществления | 2017 |
|
RU2666838C1 |
| Бункер-перегружатель | 1977 |
|
SU703669A1 |
| Устройство сигнализации о режимахРАбОТы гОРНОй пОгРузОчНый МАшиНы | 1979 |
|
SU840350A1 |
| СПОСОБ ДОБЫЧИ РУДЫ КАМЕРАМИ НА НАКЛОННЫХ ПЛАСТАХ | 2012 |
|
RU2501950C1 |
.7
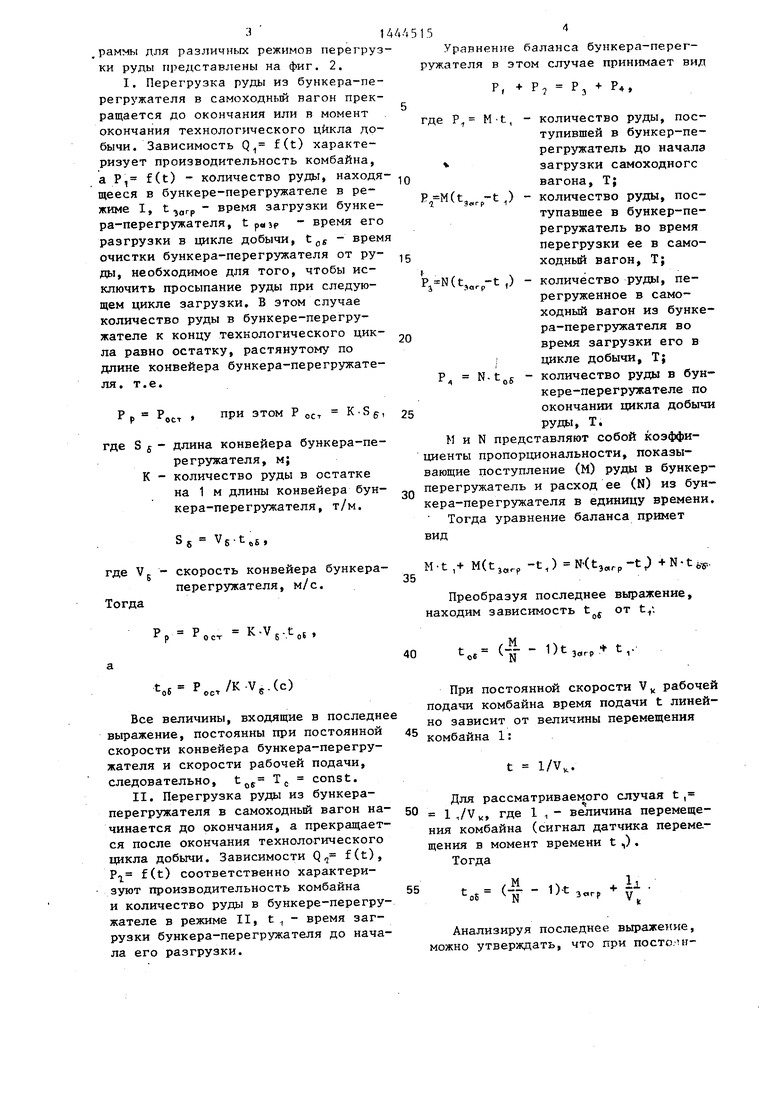
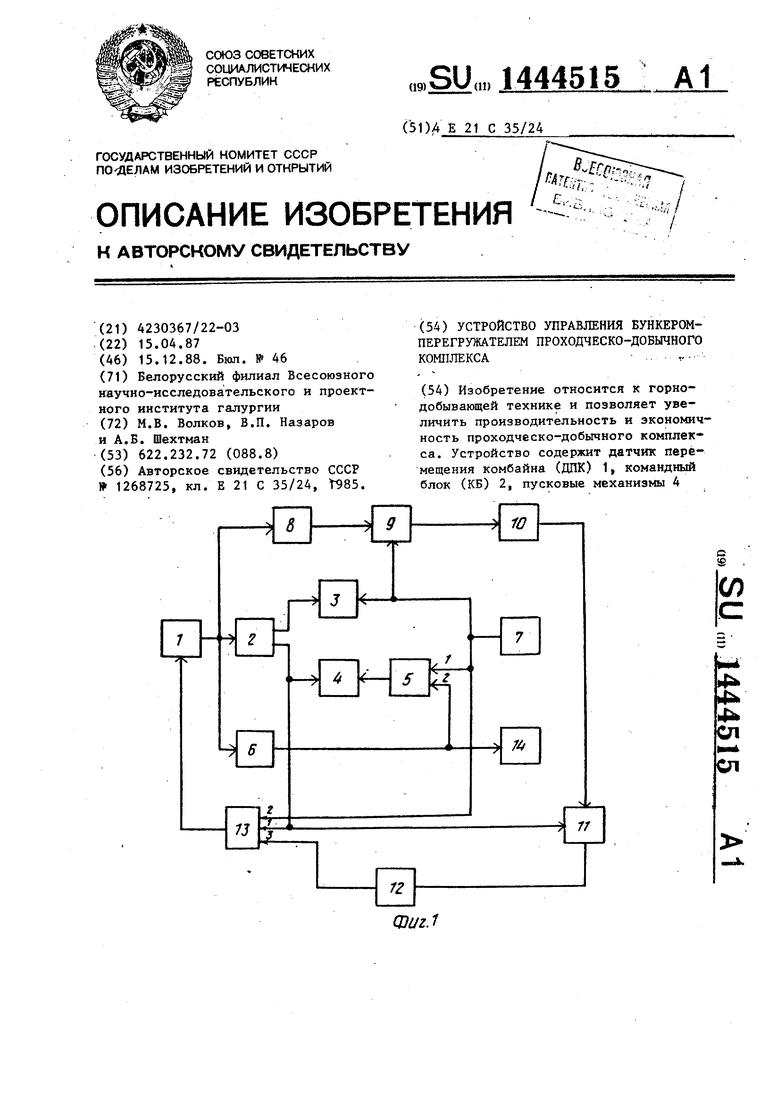
и 3 конвейера бункера-перегружателя и привода ходовой части, элементы И 5, 13, элементы НЕ 6, 12, датчик положения (ДП) 7 самоходного вагона, опорный элемент 8, аналоговый ключ 9, элемент памяти 10, управляемый одновибратор 11 и сигнальный блок f4 Вькод ДПК 1 подключен к входу опорно го элемента 8 выход которого соединен с аналоговым ключом 9. Управляющий вход последнего соединен с ДП 7, а выход - с элементом памяти 10, Выход последнего подключен к управляемому одновибратору 11, вход запуска которого соединен с входом КБ 2, а выход - с входом элемента НЕ 12. Выход элемента НЕ 12 подключен к третьему входу элемента И 13. Выход эле мента НЕ 6 соединен с входом сигналь
1
Изобретение относится к горнодобывающей технике, точнее к управлени проходческо-добычными комплексами,, в состав которых входят горно-проходческий комбайн, бункер-перегружа- тель и самоходный вагон.
Целью изобретения является увеличение эксплуатационной производительности и экономичности проход- ческо-добычного комплекса.
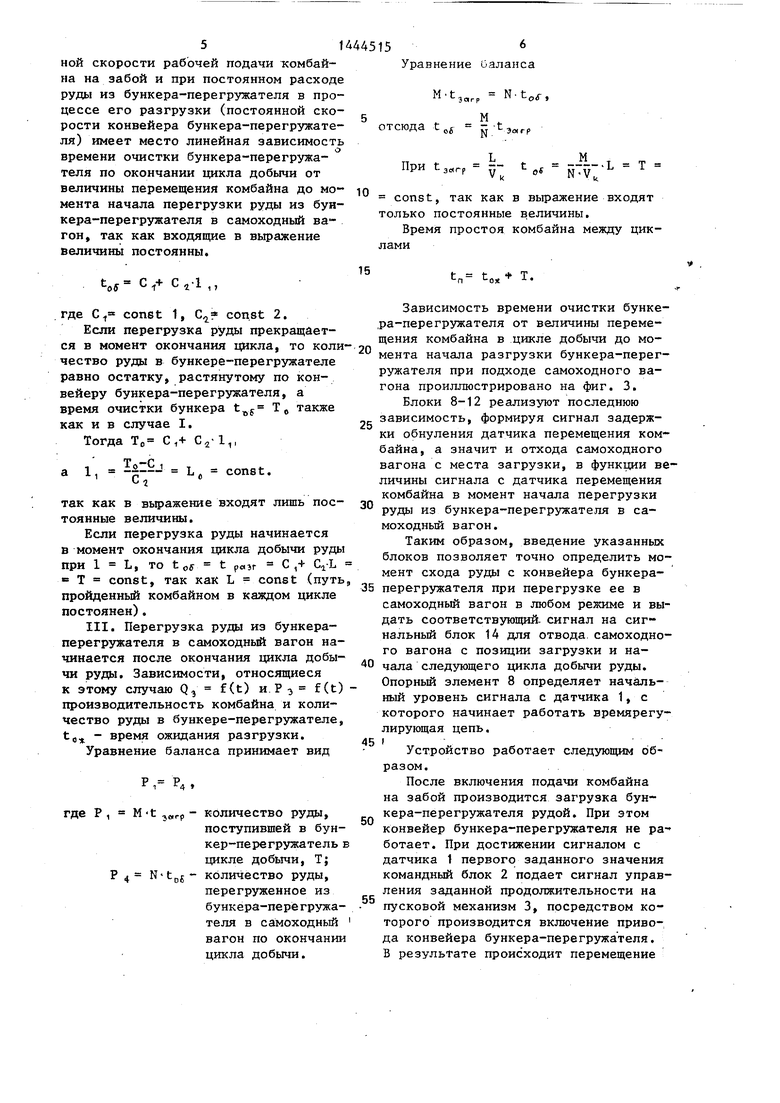
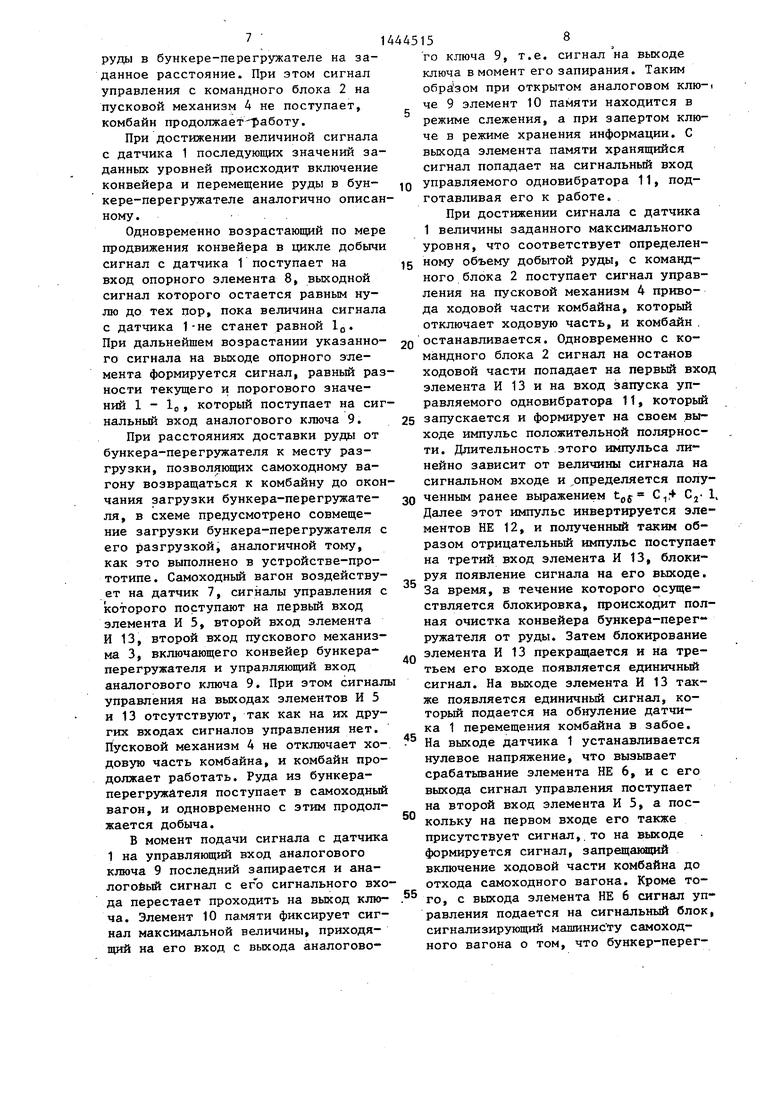
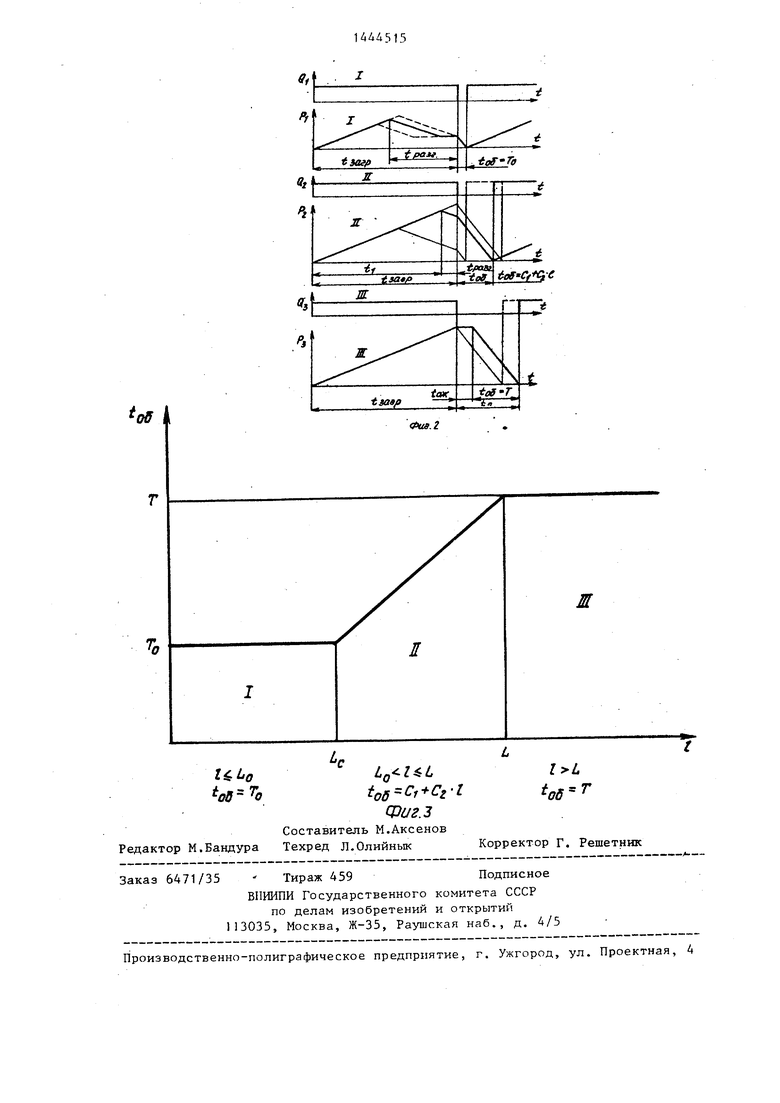
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - диаграммы для различных режимов перегрузки руды; на фиг. 3 - результирующий график зависимости времени очистки бун- кера-перегружателя от величины перемещения комбайна в цикле добычи до момента начала разгрузки бункера-пе 11йгружателя при подходе самоходного вагона.
Устройство управления бункеръм- перегружателем проходческо-добычно- го комплекса (фиг. 1) содержит датчик 1 перемещения комбайна, выход которого подключен к входу командного блока 2, один из выходов которого, связан с первым входом пускового механизма 3 конвейера бункера-перегружателя, а другой - с первым входом пускового механизма 4 приво- да ходовой части комбайна, второй вход которого соединен с выходом пер
44515
ного блока 1А, По достижении сигналом с ДПК 1 первого заданного значения КБ 2 подает сигнал на включение конвейера бункера-перегружателя. По достижении сигналом с ДПК 1 максимального уровня КБ 2 выдает сигнал на остановку комбайна. Одновременно включением одновибратора 11 задается интервал времени на полную очистку конвейера от руды. Затем происходит обнуление ДПК 1, Сигнальньй блок 14 сигнализирует машинисту, что бункер пуст. Машинист отводит самоходный вагон от комбайна. При этом ДП 7 возвращается в исходное положение и отключает привод конвейера бункера- перегружателя. Одновременно включается подача комбайна на забой и цикл повторяется. 3 ип.
O
0
0
5
вого элемента И 5 один вход которого соединен с выходом первого элемента НЕ 6, а второй - с выходом датчика 7 положения самоходного вагона. Выходы датчика 1 перемещения комбайна связаны также с входами первого элемента НЕ 6 и опорного элемента В, выход которого подключен к первому входу аналогового ключа 9, выход которого через элемент 10 памяти сое динен с первым входом управляемого одновибратора 11, выход которого через второй элемент НЕ 12 подключен к к одному из входов второго элемента И 13. Первый выход командного блока 2 соединен с входом запуска управляемого одновибратора 11, а выход первого элемента НЕ б с входом сигнального блока 14.
Управление баланса для бункера- перегружателя формулируется следующим образом. Объем руды, поступающей с комбайна в технологическом цикле добычи в бункер-перегружатель,; равняется объему руды, перегружаемому в самоходный вагон за один цикл.
Р п Pp.
при работе проходческо-добычного комплекса возможны три различных жима перегрузки руды из бункера-перегружателя в самоходный вагон. Диаг 14ДА
.раммы для различных режимов перегрузки руды представлены на фиг. 2.
I. Перегрузка руды из бункера-перегружателя в самоходный вагон прекращается до окончания или в момент окончания технологического цикла добычи. Зависимость Q f(t) характеризует производительность комбайна, а Р, f(t) - количество руды, находя- .Q щееся в бункере-перегружателе в режиме I, t ,огр - время загрузки бункера-перегружателя, t pajp - время его разгрузки в цикле добычи, - время
очистки бункера-перегружателя от ру- ды, необходимое для того, чтобы исключить просыпание руды при следующем цикле загрузки. В этом случае количество руды в бункере-перегружателе к концу технологического цикла равно остатку, растянутому по длине конвейера бункера-перегружателя, т.е.
ост
при ЭТОМ Р ост K-Sp, 25
85 длина конвейера бункера-перегружателя, м; К - количество руды в остатке
на 1 м длины конвейера бун- „Q кера-перегружателя, т/м.
V6-t,E,
где Vg - скорость конвейера бункера- M-t, M( -t,) t,) ,,
перегружателя, м/с.
ТогдаПреобразуя последнее выражение,
находим зависимость t от t/.
Рр Р,,, K-V.t, ,
to. (f - 1)t
to5 POCT/K-V,
.(с)
Все величины, входящие в последне выражение, постоянны при постоянной скорости конвейера бункера-перегружателя и скорости рабочей подачи, следовательно, tjj Т const.
II. Перегрузка руды из бункера- перегружателя в самоходный вагон начинается до окончания, а прекращается после окончания технологического цикла добычи. Зависимости Q, f(t), Р f(t) соответственно характеризуют производительность комбайна и количество руды в бункере-перегружателе в режиме II, t - время загрузки бункера-перегружателя до начала его разгрузки.
515
Уравнение баланса бункера-перегружателя в этом случае принимает вид
Р,
Р, РЗ + Р4,
Q
5
5
Q
где Р M t, - количество руды, поступившей в бункер-перегружатель до начала загрузки самоходного
вагона. Т;
( ) - количество руды, поступавшее в бункер-перегружатель во время перегрузки ее в самоходный вагон. Т;
(t,p-t ,) - количество руды, перегруженное в самоходный вагон из бункера-перегружателя во время загрузки его в цикле добычи. Т; Р - количество руды в бункере-перегружателе по окончании цикла добычи руды, т.
М и N представляют собой коэффициенты пропорциональности, показывающие поступление (М) руды в бункер- перегружатель и расход ее (N) из бункера-перегружателя в единицу времени.
Тогда уравнение баланса примет вид
40
to. (f - 1)t
Загр Г
При постоянной скорости V рабочей подачи комбайна время подачи t линейно зависит от величины перемещения комбайна 1:
t 1/V.
Для рассматриваемого случая t , 1 1/V, где 1 1 - величина перемещения комбайна (сигнал датчика перемещения в момент времени t ,) .
Тогда
55
М
05 (-М- - 1)
1л
Анализируя последнее выражение, можно утверждать, что при посто. Ш5И
ной скорости рабочей подачи комбайна на забой и при постоянном расходе руды из бункера-перегружателя в процессе его разгрузки (постоянной ско- рости конвейера бункера-перегружателя) имеет место линейная зависимость времени очистки бункера-перегружателя по окончании цикла добычи от величины перемещения комбайна до момента начала перегрузки руды из бункера-перегружателя в самоходный вагон, так как входящие в выражение величины постоянны.
oS
С i-l
11
т о также
где С const 1, const 2.
Если перегрузка руды прекращается в момент окончания цикла, то количество руды в бункере-перегружателе равно остатку, растянутому по конвейеру бункера-перегружателя, а время очистки бункера как и в случае I.
Тогда TO С,-4- С2- IT,
а 1, ---- L. const. L 1
так как в выражение входят лишь постоянные величины.
Если перегрузка руды начинается в момент окончания цикла добычи руды при 1 L, то toff t pccjr С ,+ CI-L в Т const, так как L const (путь пройденный комбайном в каждом цикле постоянен).
III. Перегрузка руды из бункера- перегрз ателя в самоходный вагон начинается после окончания цикла добычи руды. Зависимости, относящиеся к этому случаю Q, f(t) и Р 3 f(t) производительность комбайна и количество руды в бункере-перегружателе, tf - время ожидания разгрузки.
Уравнение баланса принимает вид
Р, Р
4
де Р , M t
jarp количество руды,
поступившей в бункер-перегружатель в цикле добычи. Т; Р - N tpj- количество руды, перегруженное из бункера-перегружателя в самоходный вагон по окончании цикла добычи.
M t
6
баланса
Эагр
N-t
отсюда t f
.t
N yarf
При t const,
ЭйГр
L
V,
0
M
- П-r;- L T
входят
так как в выражение только постоянные величины.
Время простоя комбайна между циклами
15
п
to
т.
0
5
0
5
0
Зависимость времени очистки бункера-перегружателя от велргчинь перемещения комбайна в цикле добычи до момента начала разгрузки бункера-перегружателя при подходе самоходного вагона проиллюстрировано на фиг. 3.
Блоки 8-12 реализуют последнюю зависимость, формируя сигнал задержки обнуления датчика перемещения комбайна, а значит и отхода самоходного вагона с места загрузки, в функции величины сигнала с датчика перемещения комбайна в момент начала перегрузки руды из бункера-перегружателя в самоходный вагон.
Таким образом, введение указанных блоков позволяет точно определить момент схода руды с конвейера бункера- перегружателя при перегрузке ее в самоходный вагон в любом режиме и выдать соответствующий, сигнал на сигнальный блок 14 для отвода, самоходного вагона с позиции загрузки и начала следующего цикла добычи руды. Опорный элемент 8 определяет начйль- ный уровень сигнала с датчика 1, с которого начинает работать времярегу- лирующая цепь.
I
Устройство работает следующим образом.
После включения подачи комбайна на забой производится загрузка бункера-перегружателя рудой. При этом конвейер бункера-перегружателя не ра- ботает. При достижении сигналом с датчика t первого заданного значения командный блок 2 подает сигнал управления заданной продолжительности на пусковой механизм 3, посредством которого производится включение привода конвейера бункера-перегружателя. В результате происходит перемещение
руды в бункере-перегружателе на заданное расстояние. При этом сигнал управления с командного блока 2 на пусковой механизм 4 не поступает, комбайн продолжает-фаботу.
При достижении величиной сигнала с датчика 1 последующих значений заданных уровней происходит включение конвейера и перемещение руды в бункере-перегружателе аналогично описанному.
Одновременно возрастающий по мере продвижения конвейера в цикле добычи сигнал с датчика 1 поступает на вход опорного элемента 8, выходной сигнал которого остается равным нулю до тех пор, пока величина сигнала с датчика 1-не станет равной IQ. При дальнейшем возрастании указанного сигнала на выходе опорного элемента формируется сигнал, равный разности текущего и порогового значений 1 - 1о, который поступает на сигнальный вход аналогового ключа 9.
При расстояниях доставки руды от бункера-перегружателя к месту разгрузки, позволякщих самоходному вагону возвращаться к комбайну до окончания загрузки бункера-перегружателя, в схеме предусмотрено совмещение загрузки бункера-перегружателя с его разгрузкой, аналогичной тому, как зто выполнено в устройстве-прототипе. Самоходный вагон воздействует на датчик 7, сигналы управления с которого поступают на первый вход элемента И 5, второй вход элемента И 13, второй вход пускового механизма 3, включающего конвейер бункера- перегружателя и управляющий вход аналогового ключа 9. При этом сигналы управления на выходах элементов И 5 и 13 отсутствуют, так как на их других входах сигналов управления нет. Пусковой механизм 4 не отключает ходовую часть комбайна, и комбайн продолжает работать. Руда из бункера- перегружателя поступает в самоходный вагон, и одновременно с этим продолжается добыча.
В момент подачи сигнала с датчика 1 на управляющий вход аналогового ключа 9 последний запирается и ана- логобый сигнал с егЪ сигнального входа перестает проходить на выход ключа. Элемент 10 памяти фиксирует сигнал максимальной величины, приходящий на его вход с выхода аналогового ключа 9, т.е. сигнал на выходе ключа в момент его запирания. Таким обра зом при открытом аналоговом клю-i че 9 элемент 10 памяти находится в режиме слежения, а при запертом ключе в режиме хранения информации. С выхода элемента памяти хранящийся сигнал попадает на сигнальный вход
0 управляемого одновибратора 11, подготавливая его к работе.
При достижении сигнала с датчика 1 величины заданного максимального уровня, что соответствует определен5 ному объему добытой руды, с командного блока 2 поступает сигнал управления на пусковой механизм 4 привода ходовой части комбайна, который отключает ходовую часть, и комбайн .
0 останавливается. Одновременно с командного блока 2 сигнал на оста«ов ходовой части попадает на первый вход элемента И 13 и на вход запуска управляемого одновибратора 11, который
5 запускается и формирует на своем выходе импульс положительной полярности. Длительность этого импульса линейно зависит от величины сигнала на сигнальном входе и определяется полу0 ченным ранее вьфажением t С, Cj- 1. Далее этот импульс инвертируется элементов НЕ 12, и полученный таким образом отрицательный импульс поступает на третий вход элемента И 13, блокируя появление сигнала на его выходе.
5
0
5
0
5
За время, в течение которого осуществляется блокировка, происходит полная очистка конвейера бункера-перег ружателя от руды. Затем блокирование элемента И 13 прекращается и на третьем его входе появляется единичный сигнал. На выходе элемента И 13 также появляется единичный сигнал, который подается на обнуление датчика 1 перемещения комбайна в забое. На выходе датчика 1 устанавливается нулевое напряжение, что вызывает срабатывание элемента НЕ 6, не его выхода сигнал управления поступает на второй вход элемента И 5, а поскольку на первом входе его также присутствует сигнал, то на выходе формируется сигнал, запрещаимций включение ходовой части комбайна до отхода самоходного вагона. Кроме того, с выхода элемента НЕ 6 сигнал управления подается на сигнальный блок, сигнализирующий машинис ту самоходного вагона о том, что бункер-перегружатель пуст. Одновременно с этим командный блок 2 подготавливает к включению цепь управления ходовой частью комбайна.
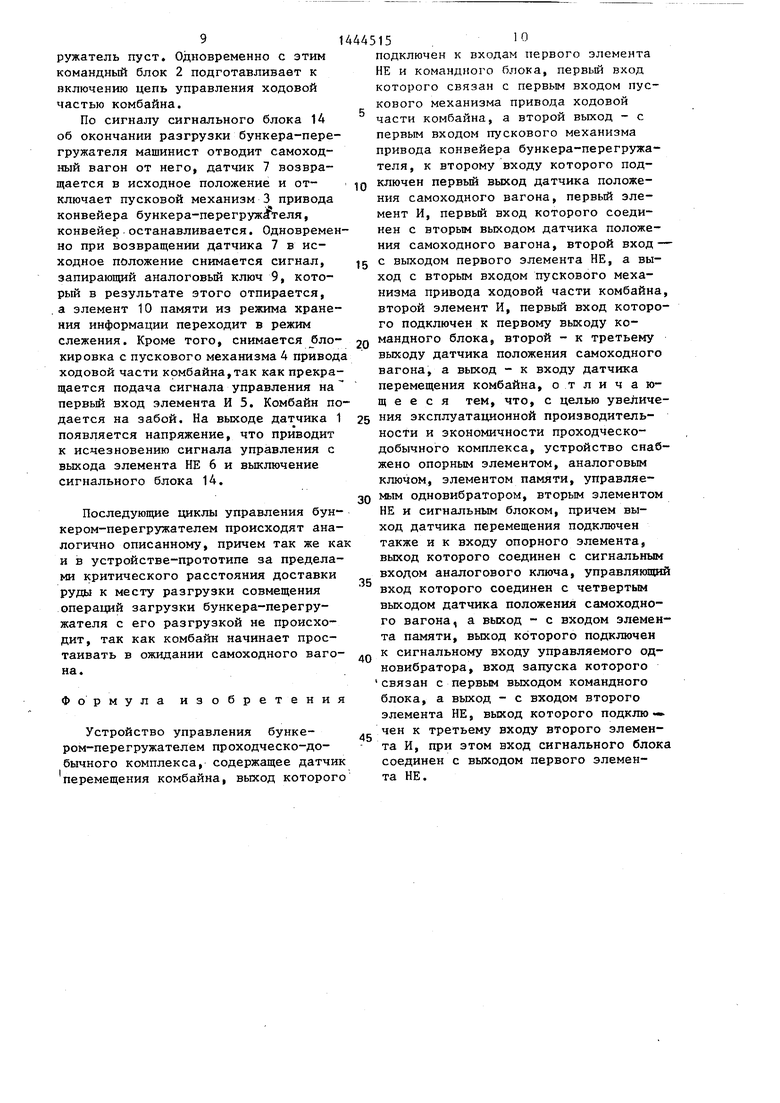
По сигналу сигнального блока 1А об окончании разгрузки бункера-перегружателя машинист отводит самоходный вагон от него, датчик 7 возвращается в исходное положение и отключает пусковой механизм 3 привода конвейера бункера-перегруж еля, конвейер останавливается. Одновременно при возвращении датчика 7 в исходное положение снимается сигнал, запирающий аналоговый ключ 9, который в результате этого отпирается, .а элемент 10 памяти из режима хранения информации переходит в режим слежения. Кроме того, снимается блокировка с пускового механизма 4 привода ходовой части комбайна,так как прекращается подача сигнала управления на первый вход элемента И 5. Комбайн подается на забой. На выходе датчика 1 появляется напряжение, что приводит к исчезновению сигнала управления с выхода элемента НЕ 6 и выключение сигнального блока 14,
Последующие циклы управления бункером-перегружателем происходят аналогично описанному, причем так же как н в устройстве-прототипе за пределами критического расстояния доставки руды к месту разгрузки совмещения операций загрузки бункера-перегружателя с его разгрузкой не происходит, так как комбайн начинает простаивать в ожидании самоходного вагона.
Формула изобретения
Устройство управления бункером-перегружателем проходческо-до- бычного комплекса, содержащее датчик перемещения комбайна, вьгход которого
подключен к входам первого элемента НЕ и командного блока, первый вход которого связан с первым входом пускового механизма привода ходовой части комбайна, а второй выход - с первым входом пускового механизма привода конвейера бункера-перегружателя, к второму входу которого подключен первый выход датчика положения самоходного вагона, первый элемент И, первый вход которого соединен с вторым выходом датчика положе10
15
20
ния самоходного вагона, второй вход- с выходом первого элемента НЕ, а выход с вторым входом пускового механизма привода ходовой части комбайна, второй элемент И, первый вход которого подключен к первому выходу командного блока, второй - к третьему выходу датчика положения самоходного вагона, а выход - к входу датчика перемещения комбайна, отличающееся тем, что, с целью увеличе25 ния эксплуатационной производительности и экономичности проходческо- добычного комплекса, устройство снабжено опорным элементом, аналоговым ключом, элементом памяти, управляе30 мым одновибратором, вторым элементом НЕ и сигнальным блоком, причем выход датчика перемещения подключен также и к входу опорного элемента, выход которого соединен с сигнальным входом аналогового ключа, управляющий вход которого соединен с четвертым выходом датчика положения самоходного вагона, а выход - с входом элемента памяти, выход которого подключен
35
40
45
к сигнальному входу управляемого од- новибратора, вход запуска которого связан с первым выходом командного блока, а выход - с входом второго элемента НЕ, выход которого подключен к третьему входу второго элемента И, при этом вход сигнального блока соединен с выходом первого элемента НЕ.
ния самоходного вагона, второй вход- с выходом первого элемента НЕ, а выход с вторым входом пускового механизма привода ходовой части комбайна, второй элемент И, первый вход которого подключен к первому выходу командного блока, второй - к третьему выходу датчика положения самоходного вагона, а выход - к входу датчика перемещения комбайна, отличающееся тем, что, с целью увеличения эксплуатационной производительности и экономичности проходческо- обычного комплекса, устройство снабено опорным элементом, аналоговым ключом, элементом памяти, управляемым одновибратором, вторым элементом НЕ и сигнальным блоком, причем выход датчика перемещения подключен также и к входу опорного элемента, выход которого соединен с сигнальным входом аналогового ключа, управляющий вход которого соединен с четвертым выходом датчика положения самоходного вагона, а выход - с входом элемента памяти, выход которого подключен
к сигнальному входу управляемого од- новибратора, вход запуска которого связан с первым выходом командного блока, а выход - с входом второго элемента НЕ, выход которого подключен к третьему входу второго элемента И, при этом вход сигнального блока соединен с выходом первого элемента НЕ.
M
06
fof-Cf -g
Фиа.2
| Устройство для управления бункером перегружателем проходческо-добычного комплекса | 1985 |
|
SU1268725A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
