бы в зависимости от характера изменяющегося уровня материала, не обеспечивает эффективного точного слежения телескоиических труб за нарастающим уровнем материала в транспортном средстве и тем самым не способно создать эффективного снижения пулеуноса из люков при загрузке.
Наличие в устройстве лишь датчика контактного типа для включения и выключения привода не обеспечивает надежной работы устройства, так как необходимое по условиям загрузки движение трубы с переменными скоростями и тем более с разными их начальными абсолютными значениями не может быть достигнуто только лишь за счет частоты включения привода движения трубы. Таким образом, принятый тип датчика не обеспечивает движения трубы с разными скоростями.
Недостатком известного устройства является и отсутствие в нем специальных элементов управления и контроля подачей материала в загрузочную трубу, связанных с приводом ее движения, что не позволяет автоматически начать загрузку после достижения трубой нижнего рабочего положения и закончить ее после заполнения транспортного средства до нужных пределов (объема, веса).
Таким образом, известное устройство не способно обеспечить эффективное снижение пылеуноса из транспортных средств различной формы при их загрузке с помощью телескопических труб ввиду неточного и ненадежного автоматического выдерживания взаиморасположения труб и уровня материала как в период загрузки, так и в момент ее начала и окончания.
Цель изобретения - снижение пылеуноса как в период загрузки материала, так и в стадии ее начала и окончания путем повышения ТОЧНОСТИ: и надежности автоматического выдерживания взаиморасположения труб и уровня материала при загрузке в транспортные средства разной формы.
Цель достигается тем, что устройство управления загрузкой сыпучих материалов в транспортные средства с помощью телескопических труб снабжено задатчиком параметров движения труб, блоком контроля наличия потока материала в трубах HI регулятором скорости, один из входов которого через преобразователь соединен с выходом задатчика параметров движения труб, другой - с выходом блока контроля наличия потока материала в трубах, соединеннь1м с блоком управления приводом подачи материала, а выходом-с командным блоком.
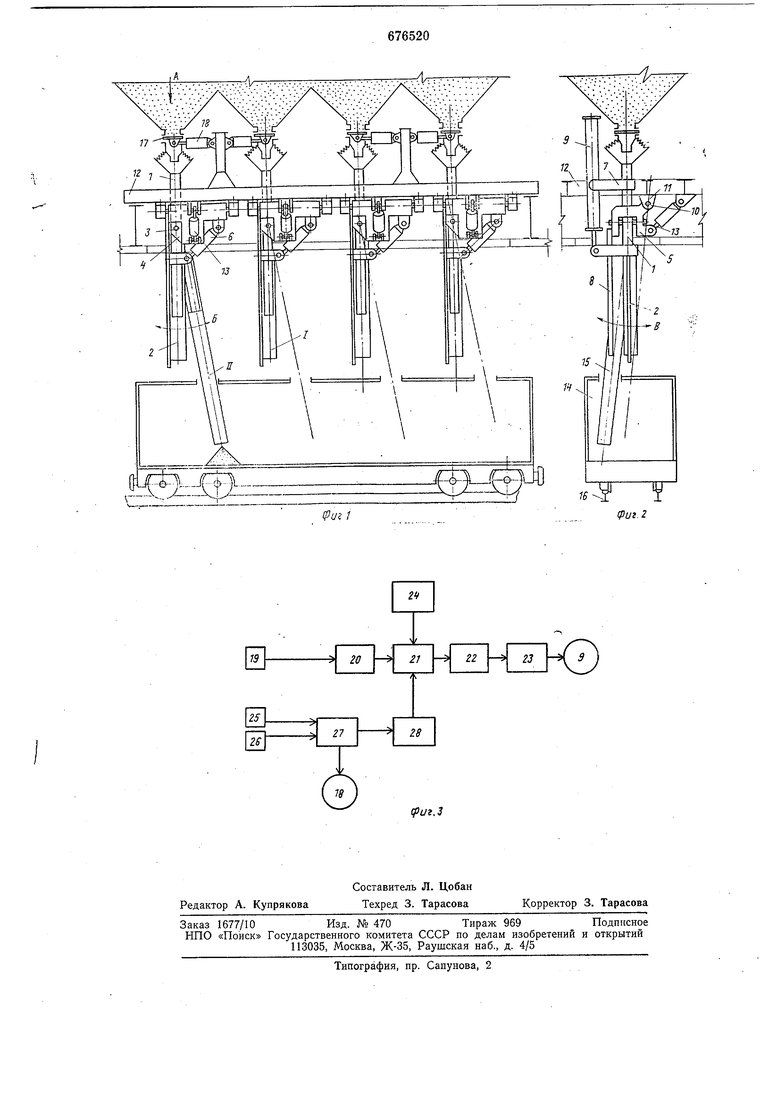
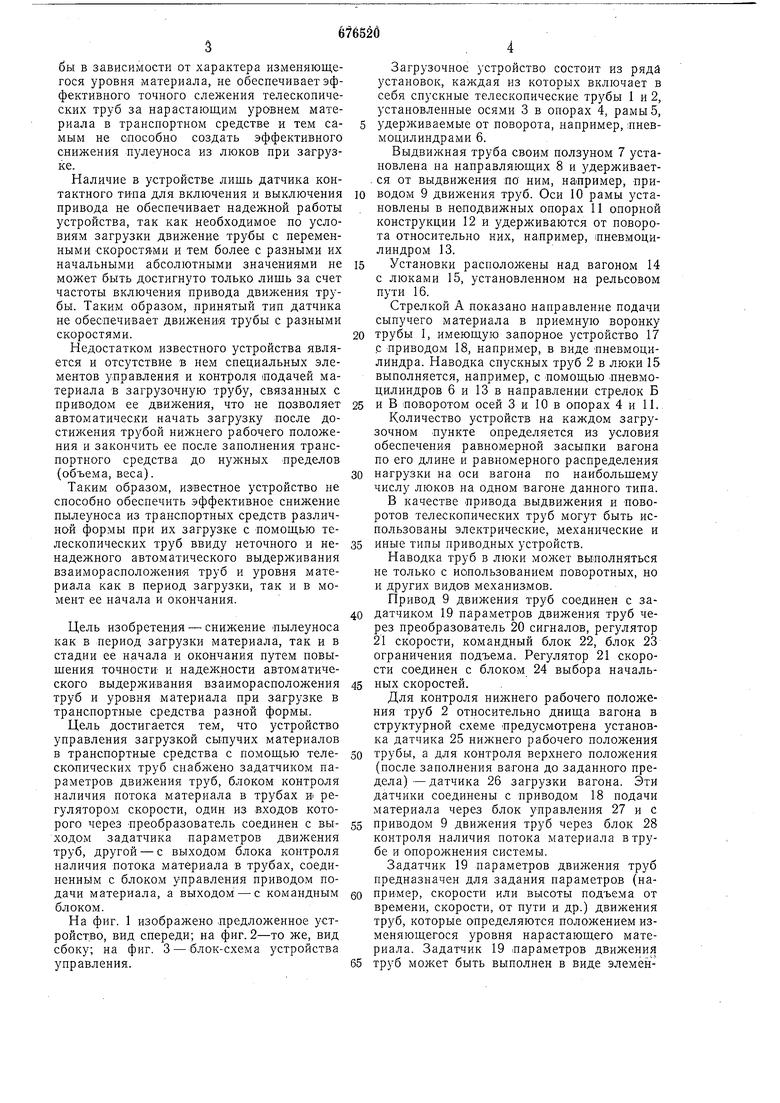
На фиг. 1 изображено предложенное устройство, вид спереди; на фиг. 2-то же, вид сбоку; на фиг. 3 блок-схема устройства управления.
Загрузочное устройство состоит из ряда установок, каждая из которых включает в себя спускные телескопические трубы 1 и 2, установленные осями 3 в опорах 4, рамы 5, удерживаемые от поворота, например, 1пневмоцилиндрами 6.
Выдвижная труба своим ползуном 7 установлена на направляющих 8 и )держивает. ся от выдвижения по ним, например, приводом 9 движения труб. Оси 10 рамы установлены в неподвижных опорах 11 опорной конструкции 12 и удерживаются от поворота относительно них, например, пневмоцилиндром 13.
Установки располол ены над вагоном 14 с люками 15, установленном на рельсовом пути 16.
Стрелкой А показано направление подачи сыпучего материала в приемную воронку трубы 1, имеющую запорное устройство 17 С приводом 18, например, в виде пневмоцилиндра. Наводка спускных труб 2 в люки 15 выполняется, например, с помощью пневмоцилиндров 6 и 13 в направлении стрелок Б и В поворотом осей 3 и 10 в опорах 4 и 11.
Количество устройств на каждом загрузочном пункте определяется из условия обеспечения равномерной засыпки вагона по его длине и равномерного распределения нагрузки на оси вагона по наибольшему числу люков на одном вагоне данного типа.
В качестве привода выдвижения н поворотов телескопических труб могут быть использованы электрические, механические и иные типы приводных устройств.
Наводка труб в люки может выполняться не только с использованием поворотных, но и других видов механизмов.
Привод 9 движения труб соединен с задатчиком 19 параметров движения труб через преобразователь 20 сигналов, регулятор 21 скорости, командный блок 22, блок 23 ограничения подъема. Регулятор 21 скорости соединен с блоком 24 выбора начальных скоростей.
Для контроля нижнего рабочего положения труб 2 относительно днища вагона в структурной схеме предусмотрена установка датчика 25 нижнего рабочего положения трубы, а для контроля верхнего положения (после заполнения вагона до заданного предела)-датчика 26 загрузки вагона. Эти датчики соединены с приводом 18 подачи материала через блок управления 27 и с приводом 9 движения труб через блок 28 контроля наличия потока материала в трубе и опорожнения системы.
Задатчик 19 параметров движения труб предназначен для задания параметров (например, скорости или высоты подъема от времени, скорости, от пути и др.) движения труб, которые определяются положением изменяющегося уровня нарастающего материала. Задатчик 19 параметров движения труб может быть выполнен в виде элемента, непосредственно следящего за ноложением уровня материала, нанример многопозиционного датчика уровня, и программного, копирующего на основе экспериментальных и теоретических данных характер изменения уровня .материала, т. е. задающего программу движения трубы по каким-либо параметрам, например по времени, скорости и др. В Последнем случае он может иметь различные модификации- исполнения, например быть выполненным в виде программного реле времени или иного типа устройства (электронного, электромеханического) , в которых переключение контактов происходит по истечении определенных, заранее заданных промежутков времени и которые позволяют подавать командные импульсы заданной длительности для подъема трубы по заранее установленному графику времени. Другим примером программного задатчика может явиться устройство, состоящее из системы, конечных выключателей, установленных на разной высоте и приводимых в действие от -поднимающейся телескопической трубы. Программные командные сигналы управления подъемом труб могут быть поданы и от датчика веса заполняющего транспорт материала -по мере увеличения веса.
Задатчик 19 параметров движения труб, выполненный в виде многопозиционного датчика уровня с несколькими, установленными одна над другой на нижних частях телескопических труб ступенями, может иметь электрическое, пневматическое и иные виды исполнения. При одновременной установке в устройстве параллельно и датчика уровня, и программного задатчика сигналы от из них могут быть поданы к блоку преобразования через блок выбора режима управления (не показан).
Преобразователь 20 сигналов предназначен для преобразования сигналов, поступающих от задатчика параметров движения труб, в сигналы управления регулятором 21 скорости и может быть выполнен, например, в виде релейного устройства.
Регулятор 21 скорости предназначен для изменения скорости привода 9 движения труб и может быть выполнен, например, в виде устройства переменных сопротивлений, из-меняющих ток в цепи якоря двигателя постоянного тока привода движения труб и подключенных к тиристорному -преобразователю привода.
Командный блок 22 предназначен для управления пуском и остановкой двигателя и включает в себя автоматический выключатель и магнитный пускатель.
Блок 23 ограничения подъема предназначен для ограничения подъема труб 2 и может быть выполнен, например, в виде стандартных конечных выключателей.
Блок 24 выбора начальных скоростей - регулирующий элемент в виде ручного задатчика-переключателя, например потенциометра, для изменения начальных скоростей.
Блок 28 контроля наличия потока в трубах предназначен для контроля наличия дви}кения потока материала из бункера в трубы I и может быть выполнен, например, в виде конечных вь ключателей, установленных на запорном з стройстве 17 привода 18
подачи материала и фиксирующих крайние положения (запертое и открытое) затвора, и реле времени.
Элементы 23-28 схемы могут иметь электрическое, гидравлическое и иные виды
исполнения.
Устройство работает следующим образом.
Принцип работы устройства основан на
том, что для эффективного снижения пылеуноса из транспортных средств разной
формы через люки, двери и другие неплотности п)тем надежного автоматического выдерживания взаиморасположения . труб и уровня материала с заданной точностью как в период загрузки, так и в -момент ее начала и окончания, привод 9 движения труб получает сигнал управления от задатчика 19 параметров движения труб, датчика 25 нижнего рабочего положения телескопических труб 2 и датчика 26 загрузки.
При работе с задатчиком параметров движения труб, выполненным в виде датчика уровня, загрузка вагона начинается после наводки и опускания спускной трубы 2 в вагон до его нижней части из положения
I в положение П. При этом приводы подачи материала и движения труб включаются после -получения сигнала от датчика 25 положения труб, который может быть )становлен как на самой трубе, так и
вне ее и срабатывать при установке трубы в нижнем положении, например, от механизма ее подъема и опускания.
По мере загрузки материала его уровень изменяется (увеличивается) и воздействует
на нижнюю ступень датчика, сигнал от которого в виде командного импульса подается на регулятор 21 скорости, в котором он преобразуется в сигнал управления скоростью -привода 9 труб, после чего
трубам сообщается большая скорость. Сигнал датчика, проходя через преобразователь 20 сигналов, регулятор 21 скорости и командный блок 22, воздействует на привод 9. Если после этого нарастание материала происходит быстрее подъема трубы, он воздействует на верхнюю ступень датчика, который подает команду в таком же порядке на сообщение трубе последующего приращения скорости. При обгоне трубой
5ФОВНЯ материала сигналом от верхней ступени датчика скорость подъема трубы снижается, при дальнейшем обгоне сигналом от нижней ступени труба получает еще большее снижение скорости. Таким образом
осуществляется слежение труб за уровнем
материала и поддержание их взаиморааположения в автоматическом режиме. При необходимости изменения начальных величин скоростей движения в регулятор 21 скорости вводятся коррективы -посредством ручного задатчика-переключателя блока 24 выбора начальных скоростей.
При работе устройства совместно с задатчиком параметров в виде программного задатчика командные сигнальные импульсы заданной длительности последнего для подъема труб по заданному графику времени, соответствующие характеру нарастания уровня материала, передаются через регулятор скорости в той же последовательности, как и лри работе с датчиком уровня. В этом случае вводом специальной программы, характеризующей формообразование материала, обеспечивается достижение той же цели, которая решается при работе с датчиком уровня.
Окончание загрузки вагона производится путем подачи сигнала от датчика 26 загрузки, подключенного, например, к измерительному устройству веса материала, загружаемого в вагон, к приводам движения труб и подачи через блок 28 контроля, после чего регулятор скорости обеспечит подъем труб в транспортное положение с максимальной скоростью.
Таким образом, устройство позволяет обеспечить эффективное снижение пылеуноса из люков транспортных средств разной формы путем повыщения точности и надежности автоматического слежения труб за положением уровня нарастающего материала. При этом работа совместно с задатчиком 19 параметров движения труб 2 обеспечивает поставленную цель в лериод загрузки, а с датчиками нижнего положения труб и загрузки - в начале и в конце загрузки.
Целесообразность задания программного управления подъемом труб диктуется необходимостью обеспечения высокопроизводительной загрузки однотипных транспортных средств с высоким темпом, определяемым главным образом временем за1Грузки, характеризующим ее производительность. Помимо сказанного, программное управление позволяет обеспечить загрузку в требуемом режиме типового транспорта нескольких видов путем ввода разных программ. Загрузку нетипового транспорта рациональнее производить с применением датчика уровня.
Использование устройства позволит обеспечить экономию материала за счет снижекия его уноса в виде .пыли и благодаря этому получить большой экономический эффект. Не менее значительным является создание благодаря использованию предлагаемого аппарата нормальных санитарногигиенических условий для работы обслуживающего персонала в зоне загрузки. Помимо этого устройство позволяет обеспечить высокопроизводительную загрузку транспортных средств практически любых
типоразмеров через люки благодаря возможности работы как от датчика уровня, так и по специальной программе, т. е. обладает свойствами универсального применения.
Одним из важнейщих преимуществ устройства является возможность обеспечения при применении специальных приборов контроля и управления Комплексной автоматизации процесса механизированной загрузки вагонов, начиная с момента подачи их в зону загрузки.
Формула изобретения
Устройство управления загрузкой сыпучих материалов в транспортные средства с помощью телескопических труб, содержащее датчики нижнего рабочего положения труб и загрузки, соединенные с блоком управления приводом подачи материала, преобразователь и соединенные последовательно командный блок и блок ограничения подъема труб, выход которого связан с приводом их движения, отличающееся тем, что, с целью снижения -пылеуноса, оно
снабжено задатчиком параметров движения труб, блоком контроля наличия Потока материала в трубах и регулятором скорости, один из входов которого через лреобразователь соединен с выходом задатчика параметра движения труб, другой - с выходом блока контроля наличия потока материала в трубах, соединенным с блоком управления -приводом подачи материала, а выходом - с командным блоком.
Источники информации, , .
принятые во внимание при экспертизе
1.Патент Великобритании № 1176982, кл. В 8Е 1973.
2.Авторское свидетельство СССР № 264154, кл. В 65G 69/18, 20.09.68.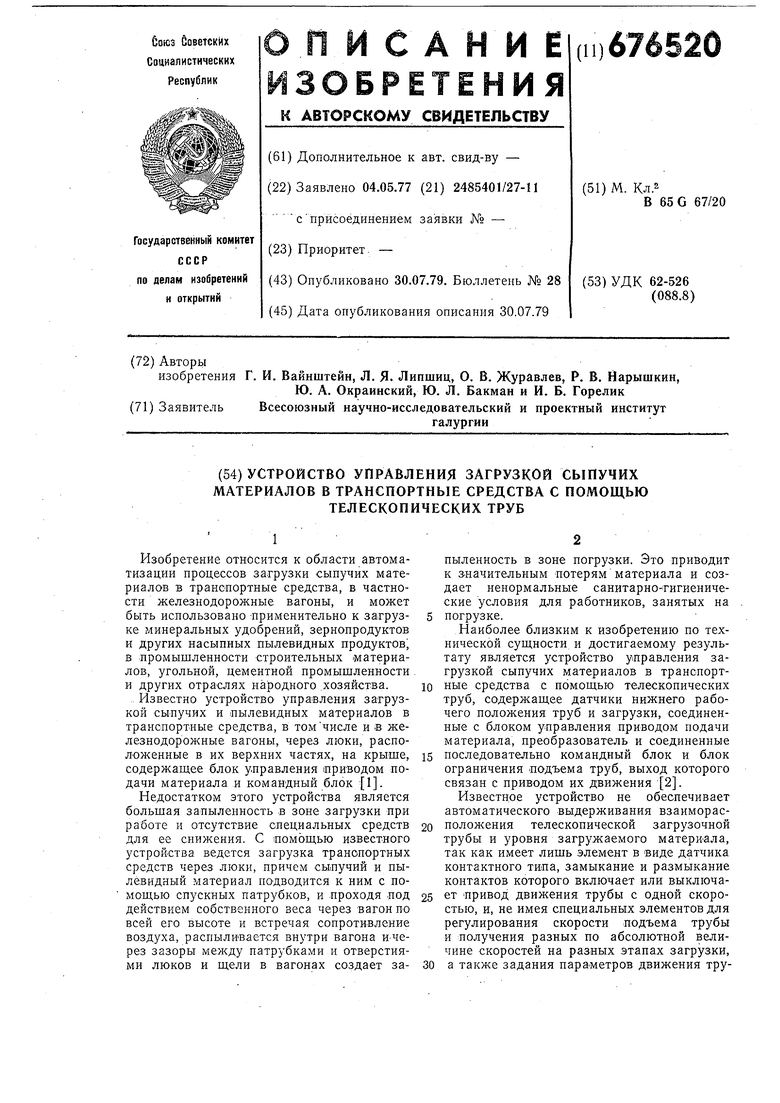
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой материалов в крытые транспортные средства через люки с помощью телескопических труб | 1978 |
|
SU950638A1 |
| Устройство для управления загрузкой материалов в крытые транспортные средства через люки с помощью телескопических труб | 1978 |
|
SU950637A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО ОЧЕРЕДНОСТИ ОБСЛУЖИВАНИЯ КОКСОВЫХ ПЕЧЕЙ И ЗАТВОРОВ УГОЛЬНОЙ БАШНИ | 1972 |
|
SU360358A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Устройство для загрузки сыпучих материалов в крытые железнодорожные вагоны | 1976 |
|
SU593993A1 |
| АВТОМАТИЧЕСКИЙ ПОГРУЗО-РАЗГРУЗОЧНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2018 |
|
RU2689080C1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Устройство для перегрузки сыпучего материала | 1990 |
|
SU1782900A1 |
| Устройство для автоматического регулирования в тормозных цилиндрах электропневматического тормоза | 1985 |
|
SU1281459A1 |
| Стенд для имитационного испытания системы управления беспилотным зерноуборочным комбайном | 2020 |
|
RU2728860C1 |