1
(21)4769883/03 (22)11.12.89 (46)07.10.92. Бюл. №37
(71)Проектно-конструкторский технологический институт
(72)Н.И.Харышак, М.Е.Калин, В.Н.Нагоняк и Н.В.Иваночко
(56)Авторское свидетельство СССР № 272890, кл. В 65 G 47/38, 1969.
Авторское свидетельство СССР Ns 184716, кл. В 65 G 47/38, 1962. (54) ГРАВИТАЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР Н.И.ХАРЫШАКА
(57)Использование: конвейер используется для перемещения длинномерных грузов, например бревен,столбов, труб, брусьев, пластин, досок, проката и др,, и может быть использован в лесопильно-деревообраба- тывающей и фанерной отрасли для подачи сырья на переработку. Сущность изобретения: гравитационный роликовый конвейер имеет последовательно расположенные механизмы подьема со средствами включения и со смонтированными на их подвижных элементах каркасами с роликами. Расширение технологических возможностей за счет обеспечения сбрасывания длинномерных грузов на боковую сторону конвейера и повышения надежности работы, обеспечивается путем выполнения каркасов V-образной формы с возможностью установки на каждом из них роликов под углом друг к другу. Каркасы по меньшей мере четырех последних по ходу перемещения длинномерных грузов механизмов подъема установлены на их подвижных элементах шарнирно и связаны с их неподвижными элементами посредством шарнирно соединенных с последними и каркасами тяг, Механизмы подъема выполнены в виде гидроцилиндров, а средства их включения - в виде фотореле, при этом гидроцилиндры снабжены регуляторами хода их штоков, 1 з.п, ф-лы, 3 ил.
сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1990 |
|
SU1766614A1 |
| Сбрасыватель длинномерных материалов с роликового конвейера | 1989 |
|
SU1789462A1 |
| Устройство для двустороннего сбрасывания длинномерных грузов с продольного конвейера | 1986 |
|
SU1400986A2 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для двустороннего сбрасывания длинномерных грузов с продольного конвейера | 1985 |
|
SU1244058A1 |
| Сортировочно-пакетирующая линия длинномерных изделий | 1986 |
|
SU1493325A1 |
| СПОСОБ ПОПЕРЕЧНОГО РАСКРОЯ СТВОЛА НА ЧУРАКИ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ, ВКЛЮЧАЯ СПОСОБ ФИКСАЦИИ СТВОЛА С УСТРОЙСТВОМ ФИКСАЦИИ И МЕХАНИЗМОМ ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2572200C2 |
| Двухсторонний перегружатель материалов | 1986 |
|
SU1373649A1 |
| УСТАНОВКА ПОПЕРЕЧНОГО РАСКРОЯ СТВОЛА НА ЧУРАКИ С МЕХАНИЗМОМ ПЕРЕМЕЩЕНИЯ СТВОЛА С УСТРОЙСТВАМИ ОТМЕРА И ФИКСАЦИИ ЕГО И ПИЛЬНЫМ МЕХАНИЗМОМ | 2012 |
|
RU2514756C1 |
| Устройство для сбрасывания длинномерных грузов | 1989 |
|
SU1713870A1 |
Изобретение относится к оборудованию для перемещения длинномерных грузов, например бревен, столбов, труб, брусьев, пластин, досок, проката и др., и может быть использовано в лесопильно-де- ревообрабатывающей и фанерной отрасли для подачи сырья на переработку.
Известно устройство для транспортировки грузов, включающее систему параллельно установленных приемно-передающих приспособлений с поворотно-установленными на них грузовыми приемниками.
Главный недостаток известного устройства - невозможность продольного перемещения длинномерных грузов,
Известен также гравитационный роликовый конвейер, включающий последовательно расположенные механизмы подъема со средствами включения и со смонтированными на них подвижных элементах каркасами с роликами,
Главный и основной недостаток известного конвейера - ограниченные технологические возможности из-за невозможности перемещения длинномерных грузов круглого сечения и сбрасывания их на боковую сторону, а также низкая надежность работы конвейера.
Цель изобретения - расширение технологических возможностей за счет обеспечех|
о о XI
00
сл
ния сбрасывания длинномерных грузов на боковую сторону конвейера и повышение надежности его работы.
Указанная цель достигается тем, что каркасы конвейера выполнены V-образной формы с возможностью установки на каждом из них роликов под углом друг к другу, а каркасы по меньшей мере четырех последних по ходу перемещения длинномерных грузов механизмов подъема установлены на их подвижных элементах шарнирно и связаны с их неподвижными элементами посредством b iu а р н и р н о соединенных с послеДниюиг и кйрка сЗми тяг.
Таким образом, предлагаемый конвейер соответствует критерию новизна, что позволяет сделать вывод в соответствии критерию существенные отличия.
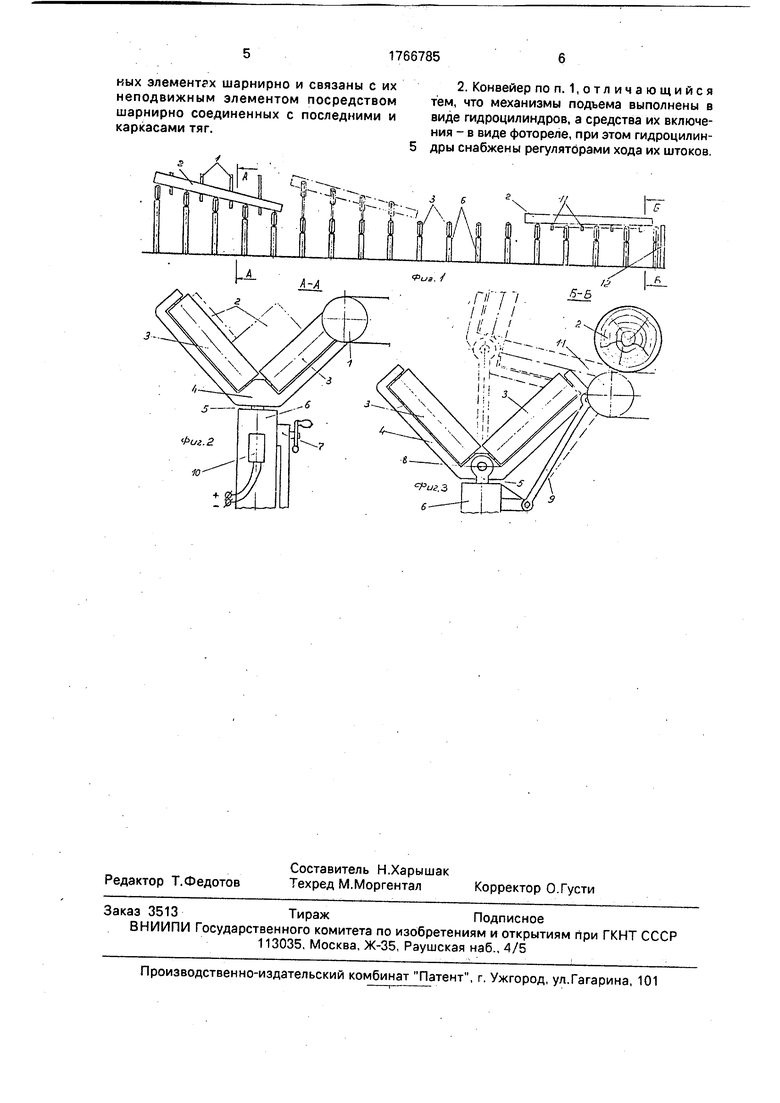
На фиг. 1 показан транспортер сбоку; на фиг. 2 - сечения по А-А на фиг. 1; на фиг. 3 - сечение по Б-Б на фиг. 1,
Гравитационный роликовый конвейер содержит поперечный транспортер 1, подающий груз 2 на ролики 3, установленные на V-образных каркасах 4, надежно поддерживающих груз и центрирующих его массу на каркасах 4. Ролики 3 свободно вращаются на своих осях. Каркасы 4 жестко закреплены на штоках 5 гидроцилиндров б, каждый из которых снабжен регулятором 7 перемещения штока 5. Последние каркасы, не менее четырех соединены со штоком 5 посредством шарнира 8, разрешающего поворот каркаса 4 в одну сторону, т.к. одна его половина шарнирно соединена тягой 9 с корпусом гидроцилиндра 6. Каждый гидроцилиндр 6 (за исключением первого и не менее четырех последних) снабжен фотореле 10 для включения подъема - опускания штока 5 поочередно по движению груза, а последний гидроцилиндр б снабжен фотореле 10 для включения одновременного подъема - опускания штоков 5 последних, не менее четырех, гидроцилиндров 6 с одновременным сбросом груза 2 на приемный транспортер 11. В конце транспортера за последним гидроцилиндром 6 установлен упор 12 для остановки груза 2.
Работает роликовый конвейер следующим образом. Транспортер 1 подает груз 2 на V-образно расположенные не менее пяти пар роликов 3, которые на первом гидроцилиндре 6 подняты на заданную высоту, а на последующих - несколько ниже относительно предыдущих, но с таким расчетом, чтобы не менее чем на шестом гидроцилиндре 6 ролики 3 находились в исходном положении. При появлении груза 2 в зоне действия фотореле 10 последнее включает одновременный подъем штоков 5 передних гидроцилиндров 6, на роликах которых побоится груз 2. Груз, находясь в наклоненном положении, скатывается на роликах 3 в сторону нижерасположенных роликов, но вследст5 вне поочередного подъема роликов по ходу груза 2 его скатывание, т.е. движение вперед продолжается. При появлении груза над следующими роликами автоматически срабатывает фотореле 10 каждого гидроцилин0 дра 6, включая подъем роликов, а ролики, освободившиеся от груза 2, возвращаются в исходное положение. Оптимальная скорость движения груза задается регулятором 7 подъема штока 5 каждого гидроцилиндра 6
5 с расчетом, чтобы грузу соответствующей массы была сообщена необходимая инерция, позволяющая ему коснуться упора 12, чем автоматически выравниваются концы груза. Как только груз оказывается на роли0 ках 3 последнего гидроцилиндра 6, срабатывает его фотореле 10, включая подъем штоков 5 последних, не менее четырех, гидроцилиндров 6, и т.к. одна сторона каждого из их каркасов 4, обращенная к приемному
5 транспортеру 11, шарнирно соединена тягой 9 с корпусом гидроцилиндра 6, при выдвижении штоков 5 их каркасы 4, поворачиваясь в сторону транспортера 11, сбрасывают груз 2 на последний, направля0 ющий груз по назначению, а штоки 5 вместе с каркасами 4 и роликами 3 занимают исходное положение. Цикл транспортировки груза беспрерывный.
Внедрение предложенного роликового
5 конвейера позволяет расширить диапазон его применения, значительно снизить расход электроэнергии, сократить трудозатраты по его монтажу и обслуживанию, повысить качество укладки груза с вырав0 ненными концами и улучшить технику безопасности его работы. Эти преимущества, по сравнению с известными транспортерами, дают положительный эффект. Формула изобретения
5 1. Гравитационный роликовый конвейер, включающий последовательно расположенные механизмы подъема со средствами включения и со смонтированными на их подвижных элементах каркасами с роликами,
0 отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения сбрасывания длинномерных грузов на боковую сторону конвейера и повышение надежности в рабо5 те, каркасы выполнены V-образной формы с возможностью установки на каждом из них роликов под углом друг к другу, а каркасы по меньшей мере четырех последних по ходу перемещения длинномерных грузов механизмов подъема установлены на их подвижных элементах шарнирно и связаны с их неподвижным элементом посредством шарнирно соединенных с последними и каркасами тяг.
|т
