Изобретение относится к управлению экскаваторами, а именно к механизмам тяги драглайна и механизмам подъема экскаватора-лопаты.
Целью изобретения является повышение эффективности ограничения пиковых значений момента нагрузки,
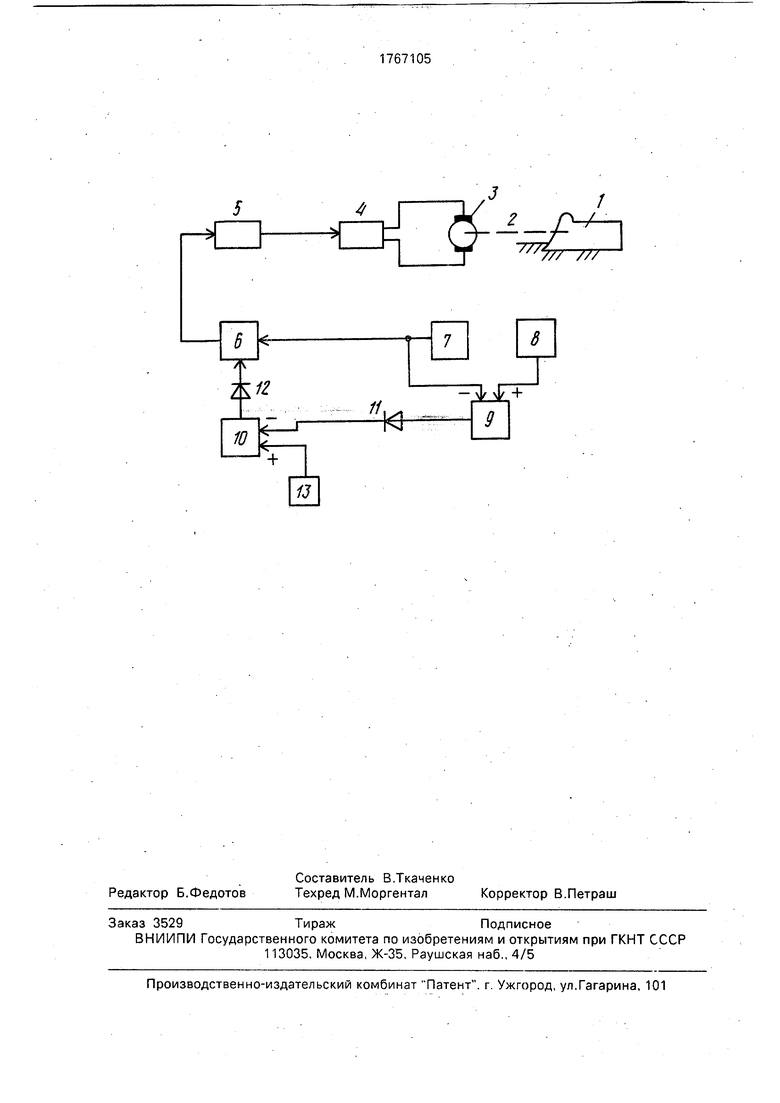
На чертеже приведена функциональная схема устройства.
Копающий механизм и его привод включает в себя ковш 1 экскаватора, соединенный через трансмиссию 2 механизма двигатель 3, подключенный к якорю двигателя управляемый преобразователь 4 с системой 5 управления.Устройство управления копающим механизмом экскаватора содержит подключенное к системе 5 управления электроприводом звено 6 ограничения, датчик 7 момента Мд двигателя 3, датчик 8 момента нагрузки Мн, первый 9 и второй 10 суммирующие усилители, первый 11 и второй 12 диоды, источник 13 задания момента отсечки Мотсз, причем выходы датчика 7 момента двигателя и датчика 8 момента нагрузки подключены к первому и второму
входам первого суммирующего усилителя 9, выход которого через первый диод 11 подключен к первому входу второго суммирующего усилителя 10, второй вход которого соединен с выходом источника 13 задания момента отсечки, выход второго суммирующего усилителя 10 через второй дополнительный диод 12 подключен к управляющему входу звена 6 ограничения, а выход датчика 7 момента двигателя подключен также к входу звена 6 ограничения.
Устройство работает следующим образом.
Выходные сигналы датчика 8 момента нагрузки Мн и датчика 7 момента двигателя Мд подают на входы первого суммирующего усилителя 9 с разными знаками. В результате на выходе первого суммирующего усилителя 9 формируют сигнал, пропорциональный разности этих моментов А М Мн - Мд. При положительном знаке этого сигнала первый диод 11 открыт, вследствие iiero этот сигнал подают на первый вход второго суммирующего усилителя 10, на второй вход которого подают сигнал задания момента
сл
С
х|
О СЛ
отсечки Мотсз с выхода источника 13 задания этого момента. Выходной сигнал второго суммирующего усилителя 10 подают через второй диод 12 на управляющий вход звена 6 ограничения, изменяя момент отсечки Моте в соответствии с зависимостью
Моте Мотсз - К(МН Мд), где К - коэффициент пропорциональности, и в режиме стопорения, когда момент нагрузки Мн превышает заданное значение момента отсечки Мотсз (и момент двигателя Мд), уменьшают текущее значение момента отсечки Моте, а вследствие этого и текущее значение момента двигателя Мд, уменьшая скорость двигателя 32 воздействием на него через систему 5 управления и преобразователь 4 в функции рассогласования между моментом двигателя Мд, уменьшающимся в результате указанного воздействия, и моментом нагрузки Мн. Уменьшение момента двигателя в режиме стопорения ускоряет торможение двигателя и снижает максимальные пиковые значения момента нагруз- ки за счет быстрого уменьшения кинетической энергии движущихся механизма и ковша. Это повышает надежность копающего механизма.
Когда скорость двигателя и механизма падает до нуля, момент нагрузки Мн уменьшается до заданного значения М0тсз,а вместе с тем и момент отсечки М0тс и момент двигателя достигает заданного значения, поскольку исчезает причина, вызвавшая превышение моментом нагрузки заданного значения.
Если разность Д М Мн - Мд отрицательна, т.е. практически момент нагрузки не превышает максимального значения Мотсз, диод 11 закрыт, формируемый вторым суммирующим усилителем 10 сигнал момента отсечки определяется только сигналом с выхода источника 13 момента задания Мотсз, т.е. момент отсечки ограничивают максимальной заданной величиной М0тс Мотсз, которой ограничивают момент двигателя, например, в режиме разгона, что требуется из условия надежной работы двигателя, а следовательно, и механизма.
Если в процессе стопорения величина Мотсз - К(МН - Мд) становится меньше нуля, минимальное значение момента отсеч- ки,т е. сигнал, поступающий с выхода второго суммирующего усилителя 10 на управляющий вход звена 6 ограничения, ограничивают нулевой величиной с помощью
второго диода 12, что исключает возможность возникновения больших отрицательных значений момента двигателя как в указанном режиме, так и в режимах тормо- жения и реверсирования приводного двигателя, что также обеспечивает повышение надежности двигателя и механизма.
Коэффициент пропорциональности К, характеризующий степень зависимости момента отсечки от разности моментов нагрузки и двигателя в предложенном устройстве в соответствии с зависимостью
Моте Мотсз - К(МН - Мд)
(выставляется коэффициентом усиления второго суммирующего усилителя 10 по первому входу), выбирают меньше единицы для обеспечения устойчивой работы управления копающим механизмом, но при этом
уменьшение момента отсечки и момента двигателя в режиме стопорения существенно превышает по величине превышение момента нагрузки над заданным моментом отсечки Мотсз, поскольку по мере уменьшения момента отсечки и момента двигателя увеличивается и разность Д М Мн - Мд, которая, в свою очередь, еще больше уменьшает момент отсечки М0тс, обеспечивая быстрое увеличение динамического момента
торможения механизма (уменьшение скорости двигателя) и эффективное ограничение пиковых значений момента нагрузки. Формула изобретения Устройство управления копающим механизмом экскаватора, содержащее датчик момента двигателя, подключенный к первому входу первого суммирующего усилителя, выход которого через диод подключен к первому входу второго суммирующего усилителя, к второму входу которого подключен источник задания момента отсечки, звено ограничения, подключенное к системе управления электроприводом, отличающееся тем, что, с целью повышения
эффективности ограничения пиковых значений момента нагрузки, оно снабжено датчиком момента нагрузки и дополнительным диодом, при этом выход датчика момента нагрузки подключен к второму входу первого суммирующего усилителя, дополнительный диод включен между вторым суммирующим усилителем и звеном ограничения, а выход датчика момента двигателя подключен также к входу звена ограничения.
4
- /
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления копающим механизмом экскаватора | 1990 |
|
SU1710676A2 |
| Способ ограничения динамических нагрузок электродвигателя и устройство для его осуществления | 1989 |
|
SU1679593A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТЙОПРНВЙДОМ " ' КОПАЮЩЕГО МЕХАНИЗМА -—_. | 1975 |
|
SU825808A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
Устройстве управления копающим механизмом экскаватора, Сущность изобретения: устройство содержит датчик 11 момента двигателя, датчик 13 момента нагрузки, два суммирующих усилителя 12, 14, два диода 15, 16, источник 17 задания мс- мента отсечки, звено 10 ограничения, систему 9 управления электроприводом. 11-10- 9; 11-14-15- 12 - 16- 10; 13 - 14; 17- 12. 1 ил.
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления копающим механизмом экскаватора | 1989 |
|
SU1641951A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
