Изобретение относится к электротехнике, а именно к средствам ограничения нагрузок электродвигателей, работающих с частыми перегрузками и стопорениями, например электроприводов землеройных машин, горнодобывающих машин, нажимных винтов прокатных станов и др.
Цель изобретения - повышение эффективности ограничения динамических нагрузок в режиме стопорения электродвигателя и повышение его надежности.
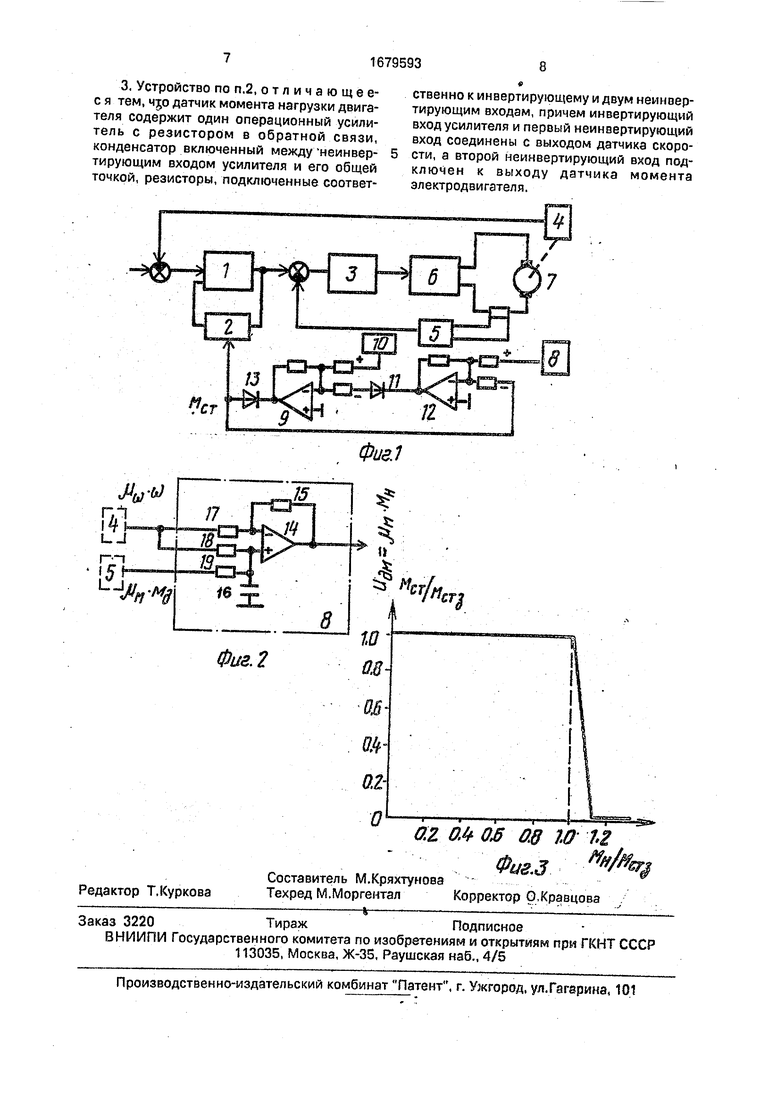
На фиг.1 приведена схема устройства для осуществления способа; на фиг.2 - схема датчика момента нагрузки; на фиг.З приведена зависимость стопорного момента от момента нагрузки.
Устройство для ограничения динамических нагрузок электродвигателя содержит последовательно включенные регулятор 1 скорости с управляемым блоком 2 ограничения в цепи его обратной связи и регулятор 3 момента двигателя, датчики 4 скорости и
момента 5 двигателя, подключенные ко входам соответственно регулятора скорости 1 и регулятора 3 момента двигателя, тири- сторный преобразователь 6, выход которого подключен к двигателю 7, датчик 8 момента нагрузки, первый суммирующий усилитель 9, к одному входу которого подключен источник 10 задания максимального значения стопорного момента, а на втором входе включен первый диод 11, второй суммирующий усилитель 12 и второй диод 13, причем два входа второго суммирующего усилителя 12 подключены к выходу датчика 8 момента нагрузки и к выходу первого суммирующего усилителя 9, выход второго суммирующего усилителя 12 через первый диод 11 подключен к второму входу первого суммирующего усилителя 9, выход которого подключен к управляющему входу блока 2 ограничения через второй диод 13. Датчик 8 момента нагрузки (фиг.2) выполнен на одном операционном усилителе 14 с резистором 15 в
СО
с
о
XI
о ел о со
обратной связи с включенным между неинвертирующим входом и общей точкой усилителя конденсатором 16 с резистором 17, подключенным к инвертирующему входу, и двумя резисторами 18 и 19, неинвертирующим входом подключенными к неинвертирующим входам, причем инвертирующий вход и первый неинвертирующий резистор- ный вход усилителя подключены к выходу датчика 4 скорости, а второй неинвертирующий резисторный вход подключен к выходу датчика 5 момента двигателя.
Согласно данному способу с помощью датчика 5 измеряют момент двигателя, задают стопорное значение момента Мет с по- мощью блока 2 ограничения в цепи обратной связи регулятора скорости, сравнивают эти величины, и по достижении моментом двигателя величины момента стопорного, вызываемого увеличением момента нагрузки, двигателя уменьшают скорость приводного двигателя, ограничивая тем самым максимальные значения момента нагрузки. Для увеличения эффективности ограничения нагрузок задают максимальное значение стопорного момента МСтэ с помощью источника 10 задания максимального значения стопорного момента, выходной сигнал которого подают через первый суммирующий усилитель 9 и второй диод 13 на управляющий вход блока 2 ограничения, измеряют момент нагрузки с помощью датчика 8, сравнивают момент нагрузки Мн с текущей величиной стопорного момента МСт (входным сигналом управляющего блика 2 ограничения) с помощью второго суммирующего усилителя 12 и изменяют значение стопорного момента в соответствии с приведенной выше зависимостью с помощью первого суммирующего усилителя 9 и диодов 11 и 13. При этом, если момент нагрузки меньше величины стопорного момента Мн Мет, то стопорный момент сохраняет величину максимального значения Мет МСтз (горизонтальный участок характеристики на фиг.З), поскольку диод 11 при этом заперт. Если в процессе стопорения момент нагрузки станет больше стопорного момента Мн МСт, то величину стопорного момента изменяют согласно зависимости Мет Мстэ - К(Мн-Мст) (ДИОД 11 при ЭТОМ открывается). Поскольку с увеличением Мн изменяется величина Мет, входящая и в правую часть этой зависимости, то зависимость стопорного момента от момента нагрузки определяется при этом выражением
Мет
Мстз К. Мн 1 -К
(крутой участок характеристики на фиг.З, построенный для К 0,9). Таким образом, даже небольшое увеличение момента нагрузки по сравнению с максимальным
стопорным моментом дает быстрое уменьшение стопорного момента, а вследствие этого и момента двигателя, что обеспечивает быстрое снижение скорости двигателя и эффективное ограничение динамических
нагрузок. При уменьшении стопорного момента до нуля К(Мн-Мст) Мстз сохраняет это нулево.е значение (фиг.З) вследствие запирания диода 13.
Устройство для осуществления способа
ограничения нагрузок электропривода работает следующим образом.
На два входа второго суммирующего усилителя 12 подают сигналы, пропорциональные моменту нагрузки Мн (с выхода датчика 8 момента нагрузки) и стопорному моменту Мет (входной сигнал управляемого блока 2 ограничения), с противоположными знаками. На выходе второго суммирующего усилителя 12 формируют разность
этих сигналов с коэффициентом К: К(МН- -МСт). Если эта разность отрицательна (при Мн Мет), то знак выходного сигнала второго суммирующего усилителя 12 запирает диод 11 и на второй вход первого суммирующего усилителя 9 поступает нулевой сигнал, а на первый его вход подают выходной сигнал источника 10 задания максимального значения стопорного момента МСтз. который через первый суммирующий усилитель
9 и открытый при этом диод 13 поступает на управляющий вход блока 2 ограничения, обеспечивая задание максимального значения стопорного момента для электродвигателя (горизонтальный участок характеристики на фиг.З), т.е. обеспечивается реализация первого значения стопорного момента из приведенной выше зависимости, определяемой данным способом.
Если момент нагрузки превысит
заданное значение стопорного момента (Мн Мстэ), то выходной сигнал второго суммирующего усилителя 12 поменяет знак, диод 11 откроется, и на второй вход первого суммирующего усилителя 9 подают сигнал,
пропорциональный величине К(Мн-МСт). со знаком, противоположным знаку сигнала Мстз с выхода источника 10, подаваемого на первый вход первого суммирующего усилителя 9. В результате с выхода первого
суммирующего усилителя через диод 13 на управляющий вход блока 2 ограничения подают уменьшающийся сигнал задания стопорного момента Мет Мстз-К(Мн-Мст). Одновременно этот уменьшающийся сигнал подают на второй вход второго суммирующего усилителя 12, вызывая ускоренный рост выходного сигнала этого усилителя 12, а вслед за этим и ускоренное уменьшение выходного сигнала первого суммирующего усилителя, т.е. быстрое уменьшение стопорного момента МСт (крутой участок характе- ристики на фиг.З), что вызывает уменьшение задаваемого регулятором скорости с .- ограничителем 2 момента двигателя, быстрое уменьшение скорости двигателя и эффективное ограничение динамических нагрузок. Если при этом выходное напряжение первого суммирующего усилителя 9 уменьшается до нуля и меняет знак, то диод 13 запирается и на входе блока 2 ограничения задание стопорного момента остается нулевым.
Датчик 8 момента нагрузки может быть выполнен в соответствии со схемой, приве- денной на фиг.2. Работает он следующим образом.
На инвертирующий вход усилителя 14 и иа его первый неинвертирующий вход подают выходной сигнал ш с выхода датчика 4 скорости т с масштабным коэффициентом /г, а на второй неинвертирующий вход усилителя подают выходной сигнал Цн Мд датчика 5 момента двигателя Мд с масштабным коэффициентом . Если принять значения параметров резисторов 15,19,17.18 и конденсатора 16 этого датчика из условий ns rig, пу ris.
с , П8 Г19 . Ј15 . Јij . П8 + М9 Г17
где J - момент инерции привода и механизма, то выходное напряжение Удм определяется зависимостью:
dtl
d ш
+ (Мд- J f) Лм Мн
где Т . . Г18 + П9
Обеспечив достаточно малое значение постоянной времени Т, достаточное для сглаживания помех (например, уменьшением величины емкости Cie конденсатора 16), можно с достаточной степенью точности считать, что выходное напряжение усилителя 14 и всего датчика 8 пропорционально моменту нагрузки Мн.
Таким образом, данное предложение позволяет повысить эффективность ограничения динамических нагрузок электропривода в режиме стопорения и тем самым
0 5
0
5 0
5
0
5
0
5
повысить надежность электропривода и механизма.
Формула изобретения
1.Способ ограничения динамических нагрузок электродвигателя, согласно которому измеряют момент двигателя, задают стопорное значение момента, сравнивают эти величины и по достижении моментом двигателя стопорного значения, вызываемого ростом момента нагрузки, уменьшают скорость приводного двигателя, а также измеряют момент нагрузки на двигатель и изменяют значение стопорного момента, отличающийся тем. что, с целью повышения эффективности ограничения динамических нагрузок в режиме стопорения и повышения надежности, сравнивают момент нагрузки с текущей величиной стопор- ного момента и изменяют значение стопорного момента в соответствии с зависимостью:
При Мн S Мп Ma ( Мс«при Мн Мл
Me - К (Мн - МсО при К (М„ - МС1) Ь М:т ,
где МСт и Мстз - текущее и максимально заданное значения стопорного момента: Мц - момент нагрузки двигателя: К - постоянный коэффициент.
2.Устройство для ограничения динами- ческих нагрузок электродвигателя, содержащее последовательно включенные регулятор, скорости с управляемым блоком ограничения в цепи его обратной связи и регулятор момента двигателя, датчики г.ко- рости и момента двигателя, подключенные к входам соответствующих регуляторов, ти- ристорный преобразователь, выход которого предназначен для подключения к якорной обмотке электродвигателя, а вход- к регулятору момента, датчик момента нагрузки, первый суммирующий усилитель, к первому входу которого подключен источник задания максимального значения стопорного момента, а на втором входе включен первый диод, второй суммирующий усилитель и второй диод, отличающееся тем, что, с целью повышения эффективности ограничения динамических нагрузок в режиме стопорения и повышения надежности, два входа второго суммирующего усилителя подключены к выходу датчика момента нагрузки и к выходу первого суммирующего усилителя через второй диод, выход второго суммирующего усилителя через первый диод подключен к второму входу первого суммирующего усилителя, выход которого подключен к управляющему входу блока ограничения через второй диод.
3. Устройство по п.2, отличающее- с я тем, чр датчик момента нагрузки двигателя содержит один операционный усилитель с резистором в обратной связи,
конденсатор включенный между неинвер- 5 сти, а второй неинвертирующий вход под- тирующим входом усилителя и его общей ключей к выходу датчика момента
ственно к инвертирующему и двум неинвертирующим входам, причем инвертирующий вход усилителя и первый неинвертирующий вход соединены с выходом датчика скоро
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления копающим механизмом экскаватора | 1989 |
|
SU1767105A1 |
| Устройство управления копающим механизмом экскаватора | 1990 |
|
SU1710676A2 |
| Устройство управления копающим механизмом экскаватора | 1989 |
|
SU1641951A1 |
| Электропривод постоянного тока с подчиненным регулированием параметров | 1976 |
|
SU692041A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Устройство для ограничения динамических усилий в канатах экскаватора | 1977 |
|
SU609848A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство для определения частоты вращения двигателя постоянного тока | 1978 |
|
SU765958A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах, работающих с частыми перегрузками и стопорениями. Целью изобретения является повышение эффективности ограничения динамических нагрузок в режиме стопорения и повышения надежности. Согласно данному способу с помощью датчика 8 измеряют момент нагрузки, сравнивают момент нагрузки с величиной стопорного момента на входе второго суммирующего усилителя 12 и изменяют значение стопорного момента по определенной зависимости, реализуемой усилителем 9, диодами 11 и 13. 2 с.п. и 1 з.п,ф-лы, 3 ил.
точкой, резисторы, подключенные соответ- ®-2
электродвигателя.
Фие.1
| Электропривод постоянного тока с подчиненным регулированием параметров | 1976 |
|
SU692041A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
