О
а
XI
о
1ю
Изобретение относится к управлению экскаваторами, а именно к механизмам тяги драглайна и механизмам подъема экскаватора-лопаты, и является усовершенствованием устройства по авт.св. № 1641951.
Целью изобретения является повышение производительности экскаватора за счет повышения быстродействия механизма в режиме разгона при сохранении высокой эффективности ограничения динамических нагрузок в канатах копающего механизма в режиме стопорения ковша.
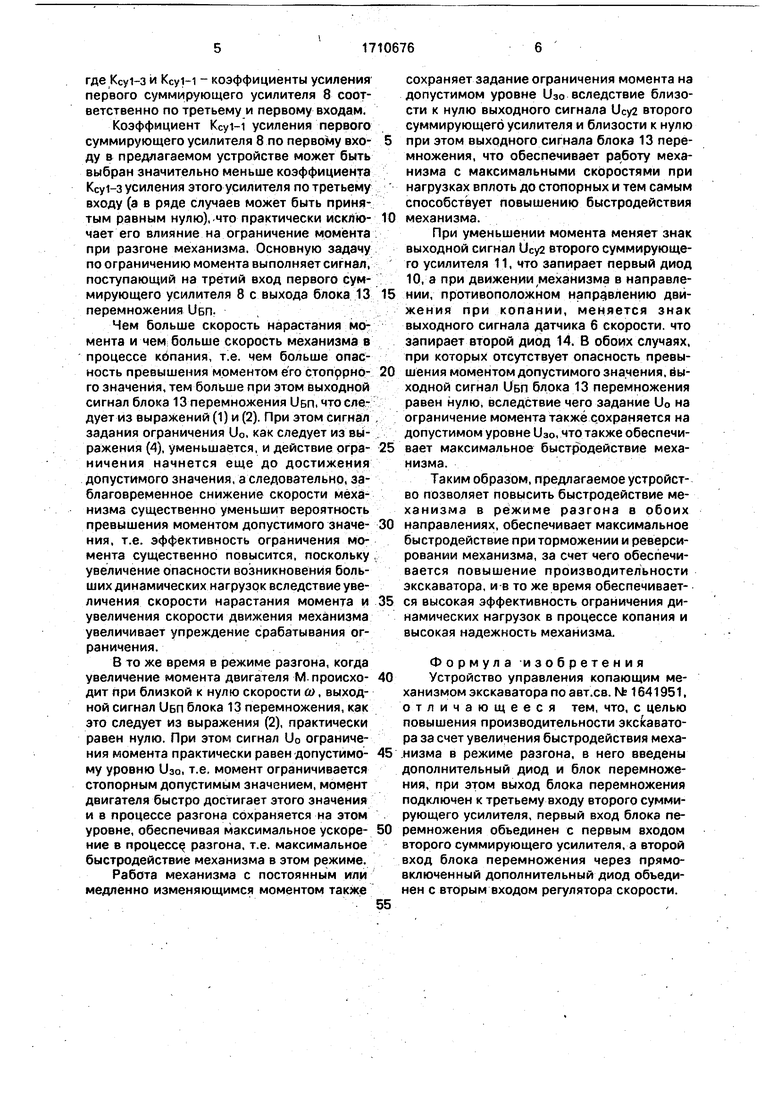
На чертеже приведена функциональная схема устройства.
Устройство управления копающим механизмом экскаватора включает двигатель 1 экскаваторного копающего механизма с питающим его преобразователем 2, к входу которого подключены соединенные последовательно регуляторы момента 3 и скорости 4 с подключенными к их входам датчикам момента 5 двигателя и скорости 6. В цепи обратной связи регулятора 4 скорости включен управляемый ограничитель 7 выходного сигнала.
Управляющий вход ограничителя 7 подключен к выходу одного суммирующего усилителя 8, два входа которого соединены соответственно с выходом источника 9 постоянного напряжения и через первый диод 10с выходом другого суммирующего усилителя 11, два входа которого, включенного по схеме вычитания, подключены к выходу датчика 5 момента непосредственно и через инерционное звено 12 соответственно.
Дополнительно в устройство введены блок 13 перемножения и второй диод 14. Выход блока 13 перемножения подключен к третьему входу первого суммирующего усилителя 8, первый вход блока 13 перемножения соединен через первый диод 10 с выходом второго суммирующего усилителя 11, а второй его вход через второй диод 14 подключен к выходу датчика 6 скорости.
Устройство работает следующим образом.
В случае увеличения нагрузки механизма возрастает сигнал с выхода датчика 5 момент jUAM М, где дм масштабный коэффициент датчика. Этот сигнал поступает на входы второго суммирующего усилителя 11 непосредственно и через инерционное звено 12, где происходит вычитание и умножение разности на коэффициент усиления усилителя 11 Ксу2.,При этом на выходе второго суммирующего усилителя11 формируется сигнал
ису2-Ксу2(идмМ- ff-г).(1)
где выражение (1+рТ) В знаменателе второго члена в скобках приведенного выражения (1) определяет задержку выходного сигнала инерционного звена 12с постоянной времени Т(р - оператор преобразования Лапласа). Если, например, момент М увеличивается линейно, также линейно увеличивается сигнал, указанный первым в скобках приведенного выражения, а второй сигнал в скобках остается по времени от первого вследствие инерционности звена 12, причем это отставание тем больше, чем больше скорость нарастания момента, поэтому и величина выходного сигнала второго суммирующего усилителя 11 при этом увеличивается.:Диод 10 включается так, что при возрастании момента он открыт, и выходной сигнал Ucy2 второго суммирующего усилителя
11 поступает на вход блока 13 перемножения, на второГ; вход которого через второй диод 14 подают выходной сигнал датчика 6 скорости (Лф- ш. где /гцг масштабный коэффициент датчика 6 скорости о . Диод 14
включен так, что на второй вход блока 13 перемножения выходной сигнал датчика 6 скорости поступает только при знаке скорости ft), соответствующем направлению движения ковша в сторону его заполнения в
процессе копания.
При этом на выходе блока 13 перемножения формируют сигнал, пропорциональный произведению скорости шна выходной сигнал Ucyr второго суммирующего усилителя 11:
иБП КБП/г.иШ- Усуг, (2) где КБП - коэффициент блока 13 перемножения.
Выходные сигналы второго суммирующего усилителя 11 и блока 13 перемножения поступают соответственно на первый и третий входы первого суммирующего усилителя В, где вычитаются из выходного сигнала источника 9 постоянного напряжения,
представляющего собой напряжение задания ограничения момента Узо. пропорциональное стопорному моменту Метоп
УЗО Мстрп.(3)
в результате на выходе первого суммирующего усилителя 8 формируется поступающий на ограничитель 7 сигнал ограничения выходного сигнала регулятора 4 скорости УО, который пропорционален текущему ограничению момента М, поступающему на вход регулятора 3 момента с выхода регулятора скорости в режиме ограничения
УО Узо - Kcyl-3 UBH - Kcy1-1 Усу2. (4)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления копающим механизмом экскаватора | 1989 |
|
SU1767105A1 |
| Устройство управления копающим механизмом экскаватора | 1989 |
|
SU1641951A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Устройство для управления поворотом одноковшового экскаватора | 1977 |
|
SU682615A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Способ ограничения динамических нагрузок электродвигателя и устройство для его осуществления | 1989 |
|
SU1679593A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Система управления механизмом поворота экскаватора-драйглайна | 1977 |
|
SU653347A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТЙОПРНВЙДОМ " ' КОПАЮЩЕГО МЕХАНИЗМА -—_. | 1975 |
|
SU825808A1 |
Изобретение относится к управлению экскаваторами, а именно к механизмам .тяги драглайна и механизмам подъема экскаватора-лопаты. Цель - повышение производительности экскаватора за счет увеличениябыстродействия механизма в режиме разгона. Устройство содержит регуляторы скорости 4 и момента 3. В цепь регулятора 4 скорости включен ограничитель, управляемый сигналом с первого суммирующего усилителя 8. На входы первого суммирующего усилителя 8 поступают сигнал от источника 9 постоянного напряжения, представляющий напряжение задания ограничения момента, сигнал с второго суммирующего усилителя 11 м сигнал с блока 13 перемножения. Основную задачу ограничения момента выполняет сигнал с блока 13 перемножения, который формирует сигнал, пропорциональный произведению скорости, поступающей с датчика 4 через диод 14, на выходной сигнал второго суммирующего усилителя 11. 1 ил.
| Устройство управления копающим механизмом экскаватора | 1989 |
|
SU1641951A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
