Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Поплавок для транспортировки на плаву трубопровода | 1981 |
|
SU976200A1 |
| Поплавок для транспортировки на плаву трубопровода | 1988 |
|
SU1534240A1 |
| СИСТЕМА Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2033371C1 |
| ПОДВОДНОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2370406C1 |
| РАСХОДОМЕР ЖИДКИХ СРЕД В ОТКРЫТЫХ ВОДОЕМАХ | 2008 |
|
RU2375681C1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| ГЛУБОКОВОДНЫЙ ОПУСКАЕМЫЙ АППАРАТ ПРЕДЕЛЬНЫХ ГЛУБИН | 2002 |
|
RU2203833C1 |
Использовано: при сооружении подводных магистральных трубопроводов. Кинематическая связь рычажно-клещевых захватов выполнена в виде тросов. Один из тросов соединен с захватом и пропущен через проходящий сквозь емкость клюз, остальные соединены соответственно своими концами с нижней частью рычагов захватов и герметичной цилиндрической емкостью. Механизм фиксации закреплен на клюзе над емкостью и взаимодействует с упором, закрепленным на тросе, пропущенном через клюз. Механизм фиксации выполнен в виде поворотного стопора, расположенного на оси ограничительной планки, курка, тяги, рычага, закрепленного на оси, каната дистанционного управления. 1 з.п. ф-лы, 2 ил.
Изобретение относится к строительству и может найти применение при сооружении подводных магистральных трубопроводов.
Целью изобретения является упрощение конструкции поплавка за счет исключения одной из емкостей и упрощения кинематических связей захватов.
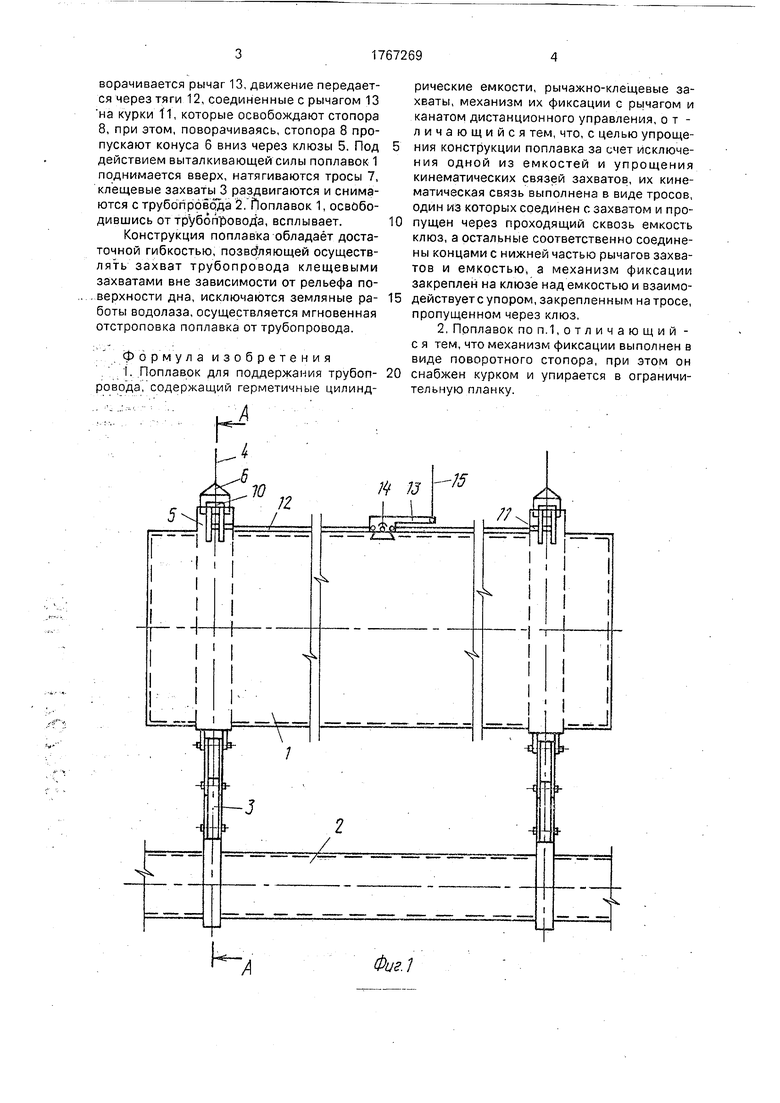
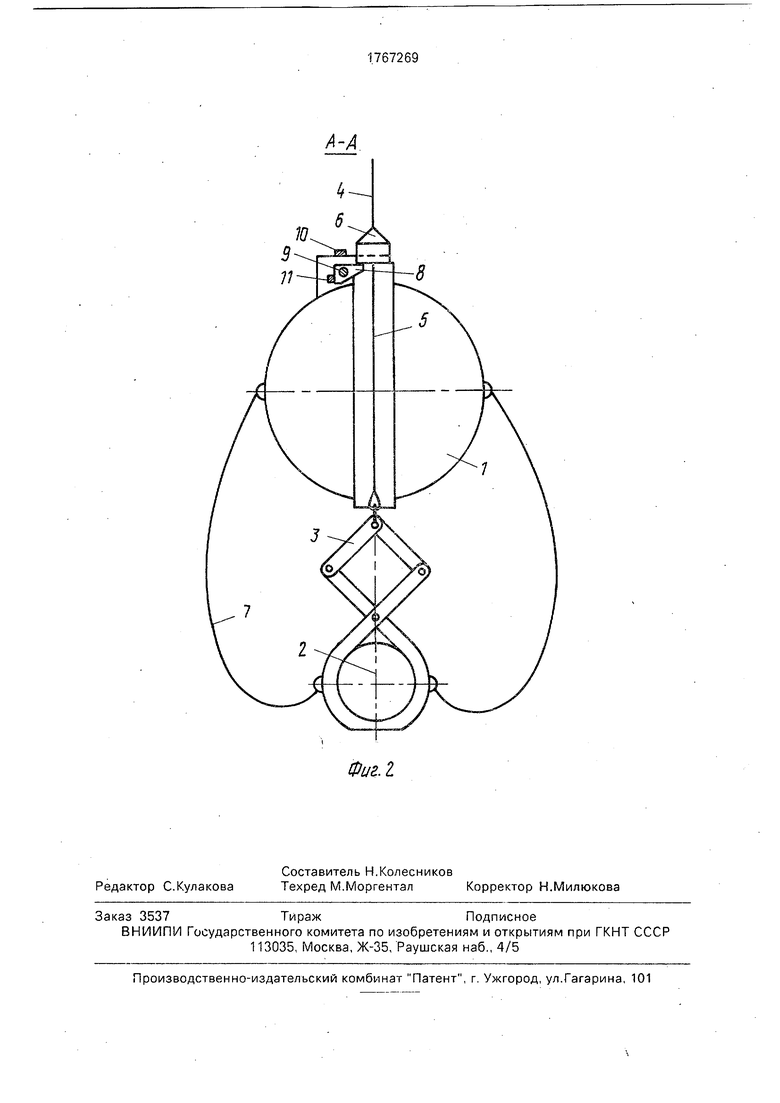
На фиг.1 изображен предлагаемый поплавок; на фиг.2 -- то же, вид сбоку.
Поплавок 1, используемый для транспортировки, прокладки и ремонта подводного трубопровода 2, содержит клещевые захваты 3, соединенные посредством тросов 4, проходящих через клюзы 5 с направляющими конусами 6, которые удерживаются на поплавке 1 с помощью механизма фиксации, тросы 7, служащие для раскрытия клещевых захватов 3.
Механизм фиксации поплавка 1 состоит из поворотного стопора 8 расположенного
на оси 9 ограничительной планки 10, курка 11, тяги 12, рычага 13, закрепленного на оси 14, каната дистанционного управления 15.
Устройство работает следующим образом.
Поплавок 1 присоединяют к подводному трубопроводу 2 посредством клещевых захватов 3, после наполнения водой поплавок 1 опускается по тросам 4 конуса 6, проходит по клюзам 5 снизу вверх, при этом срабатывает механизм фиксации, стопор 8 под действием 6 поворачивается на оси 9 до ограничительной планки 10, после прохождения конусом клюза 5 стопор под действием собственного веса возвращается в исходное положение и препятствует обратному ходу конуса 6.
Для освобождения поплавка 1 от трубопровода 2 тянут канат дистанционного управления 15, под действием которого по
О
vj
Ю О Ю
ворачивается рычаг 13, движение передается через тяги 12, соединенные с рычагом 13 на курки 11, которые освобождают стопора 8, при этом, поворачиваясь, стопора 8 пропускают конуса 6 вниз через клюзы 5. Под действием выталкивающей силы поплавок 1 поднимается вверх, натягиваются тросы 7, клещевые захваты 3 раздвигаются и снимаются с трубопровода 2. Поплавок 1, освободившись от трубопровода, всплывает.
Конструкция поплавка обладает достаточной гибкостью, позволяющей осуществлять захват трубопровода клещевыми захватами вне зависимости от рельефа поверхности дна, исключаются земляные работы водолаза, осуществляется мгновенная отстроповка поплавка от трубопровода.
Формула изобретения I. Поплавок для поддержания трубоп- 20 ровода, содержащий герметичные цилинд0
5
0
рические емкости, рычажно-клещевые захваты, механизм их фиксации с рычагом и канатом дистанционного управления, отличающийся тем, что, с целью упрощения конструкции поплавка за счет исключения одной из емкостей и упрощения кинематических связей захватов, их кинематическая связь выполнена в виде тросов, один из которых соединен с захватом и пропущен через проходящий сквозь емкость клюз, а остальные соответственно соединены концами с нижней частью рычагов захватов и емкостью, а механизм фиксации закреплен на клюзе над емкостью и взаимодействуете упором, закрепленным на тросе, пропущенном через клюз.
2, Поплавок по п1,отличающий - с я тем, что механизм фиксации выполнен в виде поворотного стопора, при этом он снабжен курком и упирается в ограничительную планку.
Фиг
| Поплавок для транспортировки на плаву трубопровода | 1981 |
|
SU976200A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
