Изобретение относится к техническим измерениям.
Цель изобретения - повышение точности, что достигается за счет раз- дельного определения линейных и угловых погрешностей измерения перемещения подвижных органов КИМ в различных точках контролируемого пространства, в котором проводят изме- рения при помощи данной КИМ.
На чертеже показана схема, разъясняющая определение погрешностей измерения перемещений подвижных органов координатно-измерительной машиныСхематично показана координатно измерительная машина (КИМ) 1, которая содержит узел 2, установленньш с возможностью перемещения по оси Y по направляющей 3, узел 4, установ- лениьп с возможностью перемещения по оси X, пиноль 5 с измерительной головкой, устаиопленная с возможностью перемещения по оси Z, и систему 6 управления. Координатно-измеритель- ная машина 1 подключена к ЭВМ 7.
Способ заключается в следующем.
Сначала определяют по трем взаимно перпендикулярным осям X, Y, Z размеры контролируемого с помощью данной КИМ пространства 8 (пунктир). В контролируемом пространстве 8 размещают эталонную концевую меру 9 длины в нескольких позициях, число которых определяют по формуле
Ь
1
к
где контролируемого
пространства вдоль соот- петствующей координатной оси; 1 ,, - длина эталонной
концевой меры длины.
Каждая .цпя состоит из трех пололчО.ний, В первом положении конце- вую меру 9 размещают вдоль выбранной оси (ось Y), на определенном расстоянии 1 от начала координат, во втором положении меру 9 размещлют параллельно первому положению на том же расстоянии 1 от него вдоль следующей оси (ось X), в третьем положении - параллельно второму на том же расстоянии 1 от него вдоль оставшейся оси (оси Z), Во всех трех положениях на каждой позиции проводят измерения длины концевой меры 9 при помощи измерительнг гх узлов 2 и 4 и сис
Q
-5
0
Q
с
0
У Т
j RZ YjRx
темы управления в данной КИМ. После чего с использованием ЭВМ определяют линейные и углоаые погрешности измерения перемещения в каждой позиции при помощи следующей системы уравнений:
lviV:7,-l,,,T -t-(L., . -X)tg(YRJ)- +(,)tg(YjR,)i Ixjv. Zz-l v Y/T..;-f(L (Y.R,)-f -b(L,,,)l:g(Yj Ry); 1 3VjZ3-lKv,Yj-T +(Lv, ,„ (Y. W(L,,,-bZ,)tg(Y,R,),
l,,Vi,V U,,,v.,2,,
x V г результаты измерения длины концевой меры в j-й позиции в первом, втором и третьем положениях соответственно,
-линершая погрешность измерения перемещений в j-ой позиции коорди- оси Y;
-угловые погрешности измерения перемещений по осям Z и X в j-ой позиции координатной оси Y;
-расстояние от направляющей 3 координатной оси у до точки начала координат;
-расстояние от направляющей координатной оси Z до точки начала координатi
-координата кольцевой меры длины в первом, втором и третьем положении j-ой позиции координатной оси Y по осям X и Z соответственно.
По координатным осям X и Z определение погрешностей измерения перемещений прой зводят аналогично.
Формула изобретения
Способ определения погрешностей измерения перемещений подвижных,органов координатио-измерительной машины (КИМ), заключающийся в том, что определяют размеры контролируемого пространства с помощью КИМ по трем взаимно перпендикулярным осям X,Y,Z, размещают в этом пространстве эталонную концевую меру длины, изме i,o
,
1
-I
1
2
ряют ее длину при помощи измерительных узлов и системы управления КИМ и определяют погрешности измерения перемещений КИМ по результатам измерения и известным математическим зависимостям с использованием ЭВМ, отличающийся тем, что, с целью повьшения точности, размеща1 „ - истинная длина эталонной
концевой меры длины,
в каждой позиции измеряют длину концевой меры в трех положенияхj в первом - располагают ее вдоль выбранной 1
оси на определенном расстоянии от начала координат, во втором - параллельно первому и на том же расстоя
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| Способ определения погрешностей трехкоординатной измерительной машины | 1990 |
|
SU1767341A1 |
| Способ определения погрешностей сборки редуктора | 1985 |
|
SU1464035A1 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СЛОЖНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2610425C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ И ПОЛНОГО ВЕКТОРА НАПРЯЖЕННОСТИ ГЕОМАГНИТНОГО ПОЛЯ | 2016 |
|
RU2624597C1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА (КИМ) | 2005 |
|
RU2307321C2 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2009 |
|
RU2477453C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| Способ калибровки лазерного сканера, предназначенного для оценки качества поверхности сварного шва | 2023 |
|
RU2821171C1 |
| Координатная измерительная машина | 1970 |
|
SU685903A1 |
Изобретение относится к техническим измерениям. Целью изобретения является повышение точности определения погрешностей измерения перемещения . Сущность способа заключается в следующем. У координатно-изме- рительной машины определяют по трем взаимно перпендикулярным осям X, Y, Z размеры контролируемого этой КИМ пространства 8. В контролируемом пространстве размещают эталонную концевую меру длины в нескольких позициях, число которых есть отношение размера контролируемого вдоль соответствующей оси пространства к истинной длине концевой меры 9. Каждая позиция состоит из трех положений. В первом положении концевую меру 9 располагают вдоль выбранной . оси (например, Y) на расчетном расстоянии от начала координат, во втором положении - параллельно первому на таком же расчетном расстоянии от него вдоль следующей координатной оси, в третьем положении - параллель- но второму и на таком же расчетном расстоянии от него вдоль оставшейся оси. В каждом положении каждой позиции измеряют длину концевой меры и по результатам измерений, используя известные математические зависимости, определяют раздельно линейные и угловые погрешности измерений перемещений КИМ. По другим координатным осям определейие погрешностей измерения перемещений производят аналогично. 1 ил. сл со 00 со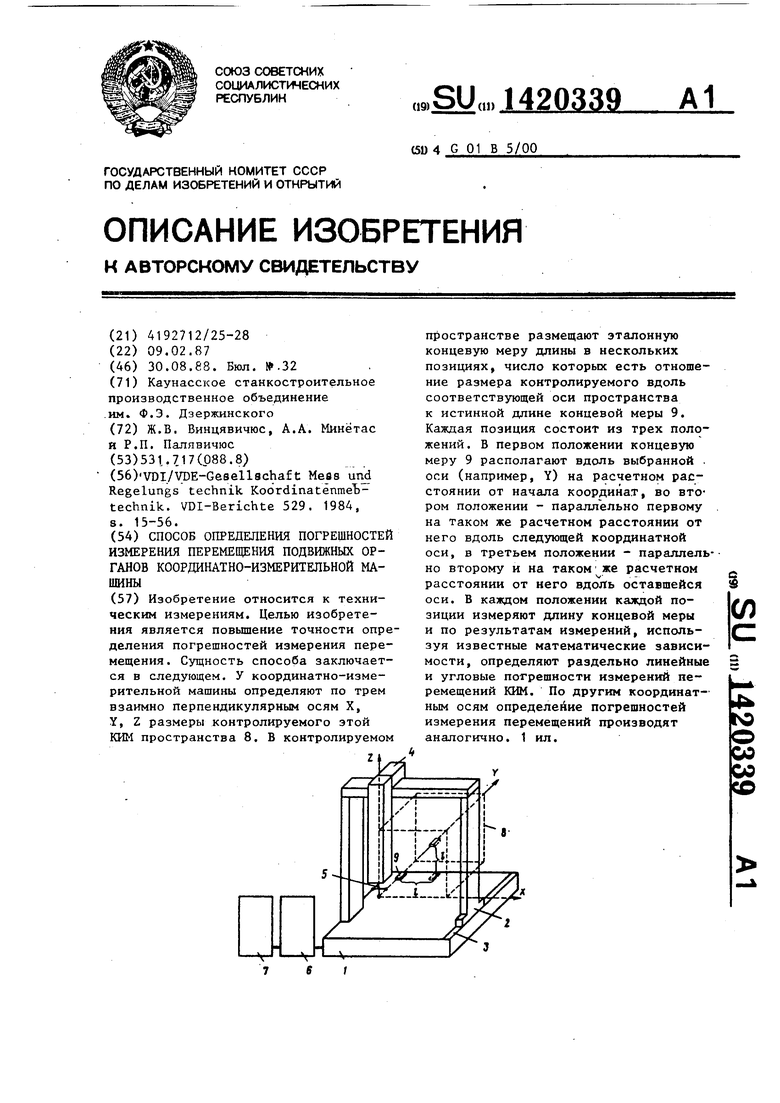
ют концевую меру длины в контролируе- нии от него вдоль следующей коорди- мом-КИМ пространстве в нескольких позициях, число hкоторых определяют по формуле
h ,
натной оси, в третьем - параллельно второму и на том же расстоянии от него вдоль оставшейся оси, и по результатам измерений определяют раздельно линейные и угловые погрешности измерения перемещения КИМ,
где L - размер контролируемого
пространства вдоль соответствующей координатной оси;
нии от него вдоль следующей коорди-
натной оси, в третьем - параллельно второму и на том же расстоянии от него вдоль оставшейся оси, и по результатам измерений определяют раздельно линейные и угловые погрешности измерения перемещения КИМ,
| VDI/ n)E-GeBellachaft Mess und Regelungs technik Koordinatenmeb- technik | |||
| Электрический быстродействующий затвор для аппарата, передающего изображения на расстояние | 1921 |
|
SU529A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
