Изобретение относится к проектированию элементов и систем автоматического управления и контроля и, преимущественно, может быть использовано при разработке бесконтактных информационных электрических машин с зубчатым ротором без обмотки.
Известен способ, согласно которому при подаче напряжения переменного тока на две входные обмотки в магнитопроводе датчика создается вращающийся магнитный поток, который наводит в выходных обмотках сигнал, по значению фазы которого относительно опорного сигнала определяют угловое положение ротора относительно статора, а по скорости изменения фазы выходного сигнала относительно опорного определяют частоту вращения ротора. Этот способ реализован в 1. Однако способ не может быть применен в системе управления, контроля и в электроприводах, где сигнал с датчика об угловом положении ротора относительно статора и о частоте вращения ротора должен быть представлен в виде амплитуды напряжения ЭДС.
Известен другой способ, согласно которому в магнитопроводе датчика создают пульсирующий магнитный поток, который наводит в выходных обмотках сигналы. Сигналы демодулируют и по моментам прохождения демодулированными сигналами нулевых значений определяют угловое положение ротора относительно статора, а по скорости нарастания (убывания) линейных
Х|
О XI О СО
ел
восходящих (нисходящих) фронтов демоду- лированных выходных сигналов трапецеидальной формы определяют частоту вращения ротора. Способ реализован в 2. Этот способ позволяет получить только дискретную информацию об угловом положении ротора относительно статора, что ограничивает область его применения.
Наиболее близким по технической сущности к заявляемому следует считать известный способ, заключающийся в том, что при подаче напряжения переменного тока на обмотку возбуждения создаваемый в магнитопроводе датчика переменный (пульсирующий с частотой сети) магнитный поток наводит во взаимоперпендикулярных выходных обмотках сигнал, амплитуда одной составляющей которого пропорциональна синусу и косинусу угла поворота ротора относительно статора, а амплитуда второй его составляющей (э.д.с. вращения), возникающей при вращении ротора, пропорциональна частоте вращения ротора 3.
Этот способ может быть реализован, например, в датчике по 5, содержащем, кроме обмотки возбуждения, вторую обмотку, ось которой совпадают с осью обмотки возбуждения или параллельна ей. Однако, амплитуда составляющей выходного сигнала, формируемой по этому способу при вращении ротора датчика, очень мала, что ограничивает область применения способа и датчика.
Целью изобретения является расширение области применения способа и датчика углового положения путем получения на выходе сигнала о частоте вращения ротора датчика,
С этой целью на вторую входную обмотку датчика подают напряжение постоянного тока.
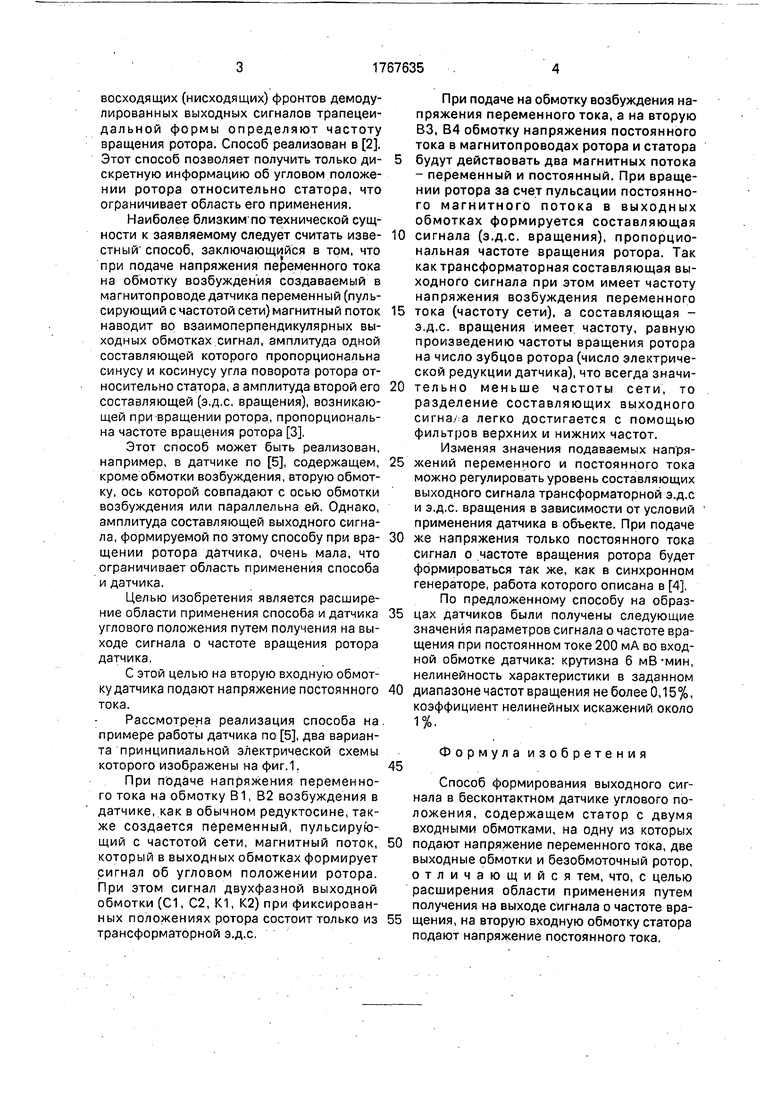
Рассмотрена реализация способа на примере работы датчика по 5, два варианта принципиальной электрической схемы которого изображены на фиг.1.
При подаче напряжения переменного тока на обмотку В1, В2 возбуждения в датчике, как в обычном редуктосине, также создается переменный, пульсирующий с частотой сети, магнитный поток, который в выходных обмотках формирует сигнал об угловом положении ротора. При этом сигнал двухфазной выходной обмотки (С1, С2, К1, К2) при фиксированных положениях ротора состоит только из трансформаторной э.д.с,
При подаче на обмотку возбуждения напряжения переменного тока, а на вторую ВЗ, В4 обмотку напряжения постоянного тока в магнитопроводах ротора и статора
будут действовать два магнитных потока - переменный и постоянный. При вращении ротора за счет пульсации постоянного магнитного потока в выходных обмотках формируется составляющая
сигнала (э.д.с. вращения), пропорциональная частоте вращения ротора. Так как трансформаторная составляющая выходного сигнала при этом имеет частоту напряжения возбуждения переменного
тока (частоту сети), а составляющая - э.д.с. вращения имеет частоту, равную произведению частоты вращения ротора на число зубцов ротора (число электрической редукции датчика), что всегда значительно меньше частоты сети, то разделение составляющих выходного сигна а легко достигается с помощью фильтров верхних и нижних частот.
Изменяя значения подаваемых нап ряжений переменного и постоянного тока можно регулировать уровень составляющих выходного сигнала трансформаторной э.д.с и э.д.с. вращения в зависимости от условий применения датчика в объекте. При подаче
же напряжения только постоянного тока
сигнал о частоте вращения ротора будет
формироваться так же, как в синхронном
генераторе, работа которого описана в 4,
По предложенному способу на образцах датчиков были получены следующие значения параметров сигнала о частоте вращения при постоянном токе 200 мА во входной обмотке датчика: крутизна 6 мВ-мин, нелинейность характеристики в заданном
диапазоне частот вращения не более 0,15%, коэффициент нелинейных искажений около 1%.
45
Формула изобретения
Способ формирования выходного сигнала в бесконтактном датчике углового положения, содержащем статор с двумя входными обмотками, на одну из которых
подают напряжение переменного тока, две выходные обмотки и безобмоточный ротор, отличающийся тем, что, с целью расширения области применения путем получения на выходе сигнала о частоте вращения, на вторую входную обмотку статора подают напряжение постоянного тока.
83Kf
I л tis Л
64
K2
,t
8
-B2 CjUv4vvx C2 -ВЧ1
г
K2
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| Вентильный электродвигатель | 1980 |
|
SU972634A1 |
| Бесконтактный стабилизированный по напряжению генератор переменного тока с комбинированным возбуждением | 2019 |
|
RU2713470C1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| СИСТЕМА ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГОСГОРАНИЯ | 1968 |
|
SU211218A1 |
| Поворотный трансформаторныйпРЕОбРАзОВАТЕль | 1979 |
|
SU815774A1 |
| Вентильный электродвигатель | 1974 |
|
SU561257A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| ЭЛЕКТРОБУР ДЛЯ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН (ВАРИАНТЫ) | 2003 |
|
RU2321717C1 |
| ВСЕСЧ>&ЮЗИАЯ пдтЕШ11а-Т1:хпУ1ЕСй | 1973 |
|
SU388335A1 |

Использование: системы автоматического управления и контроля. Сущность изобретения: при формировании выходного сигнала в бесконтактном датчике углового положения на одну из входных обмоток статора подается переменное напряжение, на другую - постоянное. При вращении ротора на выходных обмотках статора создается сигнал о частоте вращения. 1 ил. (Л С
/
a)
/ i
;
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США №4612503, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Электрические микромашины автоматических устройств, Л.; Энергия, 1976, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Бесконтактные электрические машины, М.: Высшая школа, 1985, с | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
