Изобретение относится к автоматике, в частности к технике управления вентильными позиционными электроприводами постоянного тока, управляемыми от вычислителя и может быть использовано для электроприводов, обеспечивающих перемещение рабочих органов механизмов на заданную величину по сигналу управления с центрального вычислителя, в частности, может быть использовано для управления рулевыми поверхностями летательных аппаратов, а та системах подтяжки строп парашютов для точного сброса грузов в требуемое место.
Целью изобретения является повышение быстродействие, повышение надежности работы за счет самоконтроля перед началом работы, а также расширение области использования за счет возможности
программной перестройки регулятора при заданной аппаратной структуре для получения требуемых технических характеристик электропривода.
Поставленная цель достигается тем, что в вентильный электропривод введены шина входного сигнала управления, соединенная со входом преобразователя входного напряжения в код и первым входом аналогового ключа, выход которого соединен с преобразователем напряжения обратной связи по положению а код, выход которого соединено вторым входом устройства определения ошибки рассогласования по положению и первым входом устройства контроля, второй вход которого соединен с выходом преобразователя входного напряжения в код и первым входом устройства определения ошибки рассогласования по
положению, выход которого соединен со входами устройства определения требуемо- го напряжения вращения, устройства определения зоны нечувствительности и первым входом устройстгз определения рассогласования по скорости, второй вход которого соединен с выходом цифрового датчика скорости, первый вход которого соединен с выходом генератора импульсов, второй вход соединен с выходом схемы ушестерения частоты датчика положения ротора, последовательно соединенные коммутатор вентильного двигателя, вентильный двигатель, исполнительный механизм, датчик по- ложения, выход которого соединен со вторым входом аналогового ключа, третий вход которого соединен со вторым выходом устройства контроля, первый выход которого соединен со входом управления блока аналоговых ключей, первая группа входов .которого соединена с выходами датчиков DA, Р В, DC коммутатора вентильного двигателя, вторая группа входов соединена с выходами формирователя контрольной частоты, выходы блока аналоговых ключей соединены со входами схемы ушестерения частоты ДПР и входами устройства определения истинного направления вращения, в ыход которого со/единен с первым входом устройства формирования направления вращения на коммутатор, второй вход которого соединен с выходом преобразователя код-ШИМ и четвертым входом устройства контроля, третий вход которого соединен с шиной сигнала Контроль, третий выход соединен с выходной шиной Исправность, пятый вход устройства контроля соединен с выходом силовых ключей коммутатора вентильного двигателя, вход динамического торможения коммутатора соединен с выходом преобразователя код-Щ ИМ, вход направления вращения коммутатора соединен с-выходом устройства формирования направления вращения на коммутатор, третий вход устройства формирования направления вращения на коммутатор соединен с выходом устройства определения требуемого направления вращения, выход устройства определения рассогласования по скорости соединен с первым входом реверсивного счетчика, второй вход которого соединен с выходом устройства определения зоны нечувствительности.
В прототипе при отличии значений периодов датчика скорости и задатчика скорости менее чем в 2 раза режим форсирования уменьшения рассогласования с максимальным ускорением не работает и реверсивный счетчик работает с поетояннойчастотой, не- .зависящей от величины рассогласования.
В предлагаемом устройстве во всем диапазоне изменения ошибки рассогласования по скорости изменяется частота, поступающая на реверсивный счетчик. При
увеличении величины рассогласования частота заполнения реверсивного счетчика увеличивается. Это позволяет значительно увеличить частоту при больших рассогласованиях, Ъ то время как при малых рассогла0 сованиях эта частота уменьшается, что позволяет значительно увеличить быстродействие и в тоже время уменьшить перерегулирование. Программируемость работы электропривода позволяет простой сменой
5 программы работы привода изменить технические характеристики работы для различных условий эксплуатации и различных применений. Появляется возможность использования стандартной аппаратной
0 структуры для реализации большого спектра электроприводов за счет простой смены программы работы электропривода.
Использование тестового контроля позволяет вычислительному устройству;
5 с которым будет работать данный электропривод определить его работоспособность и в случае его неисправности включить резерв, что повышает надежность функционирования всей системы в целом.
0
В наземных условиях использование встроенной системы контроля позволяет проводить тест-контроль на борту Л А без какого-либо использования контрольно5 проверочной аппаратуры. При тест-контроле проверяется исправность преобразователя входного напряжения в код, преобразователя напряжения обратной связи по положению в код, преобразователя код-ШИМ,
0 схемы ушестерения частоты ДПР, коммутатора вентильного двигателя, цифрового датчика скорости. Надежность повышается также за счет того, что тест-контроль осуществляется без существенного повышения
5 аппаратных затрат, увеличение которых приводит к снижению надежности работы системы контроля и всей системы в целом. В данном случае тест-контроль осуществляется вычислителем, который после прове0 дения контроля переходит на рабочую программу управления.
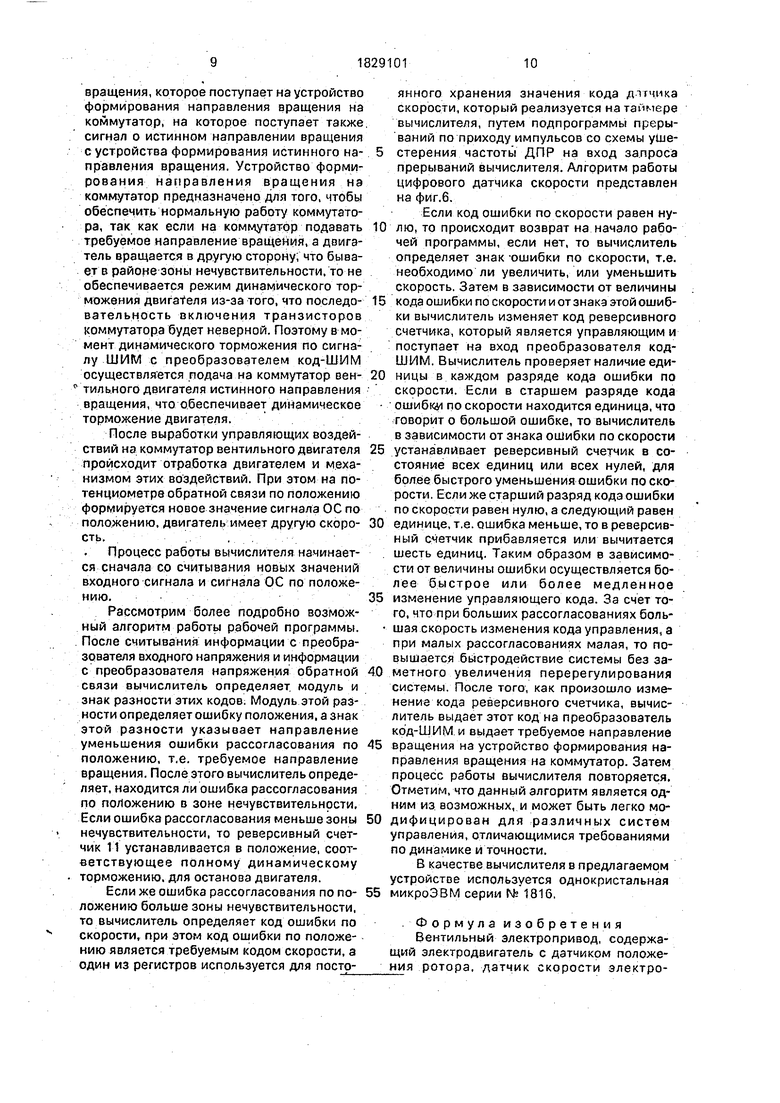
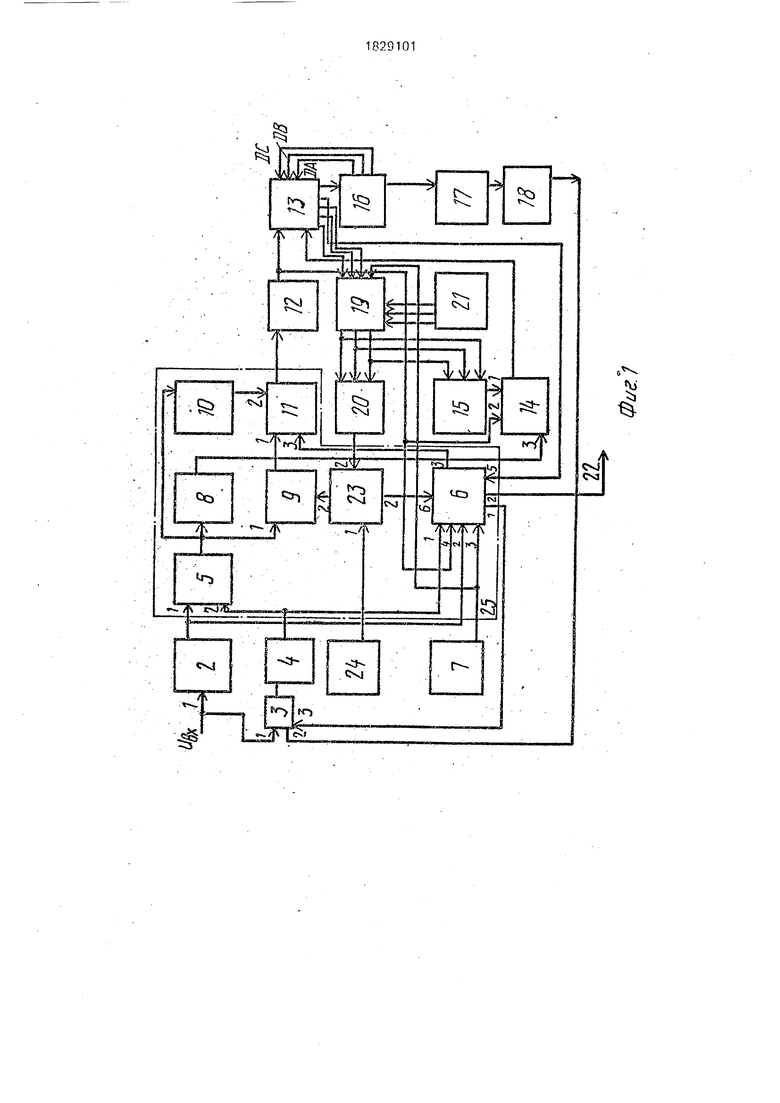
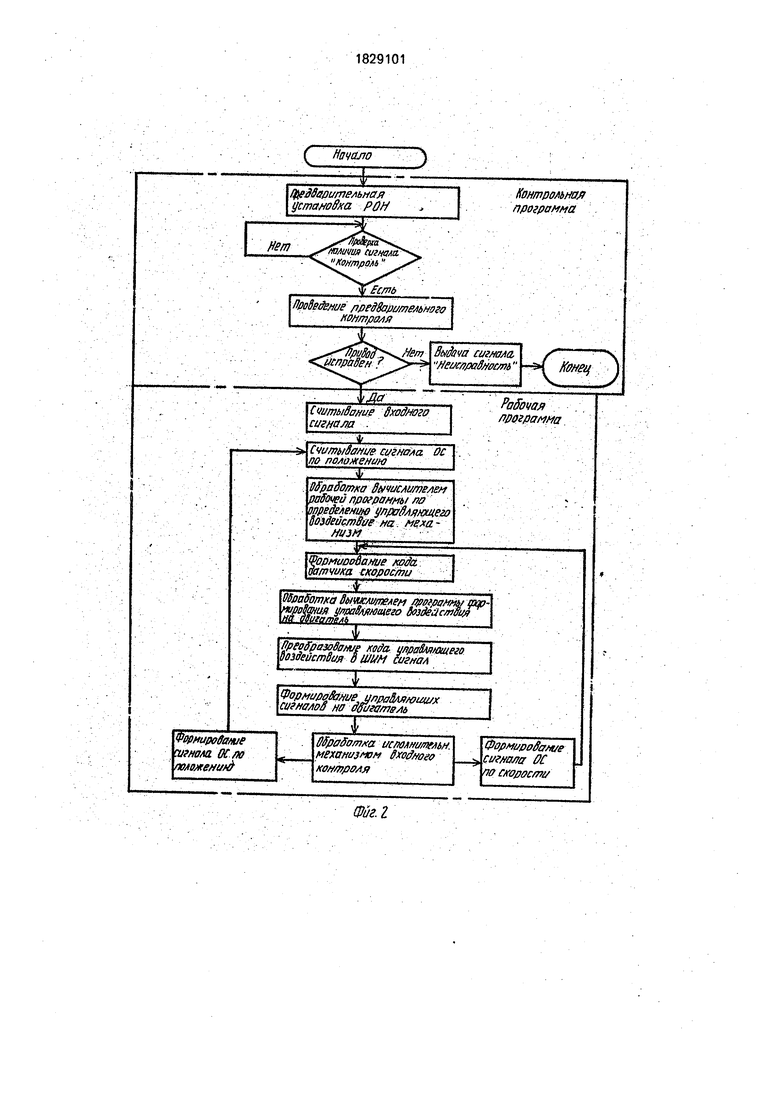
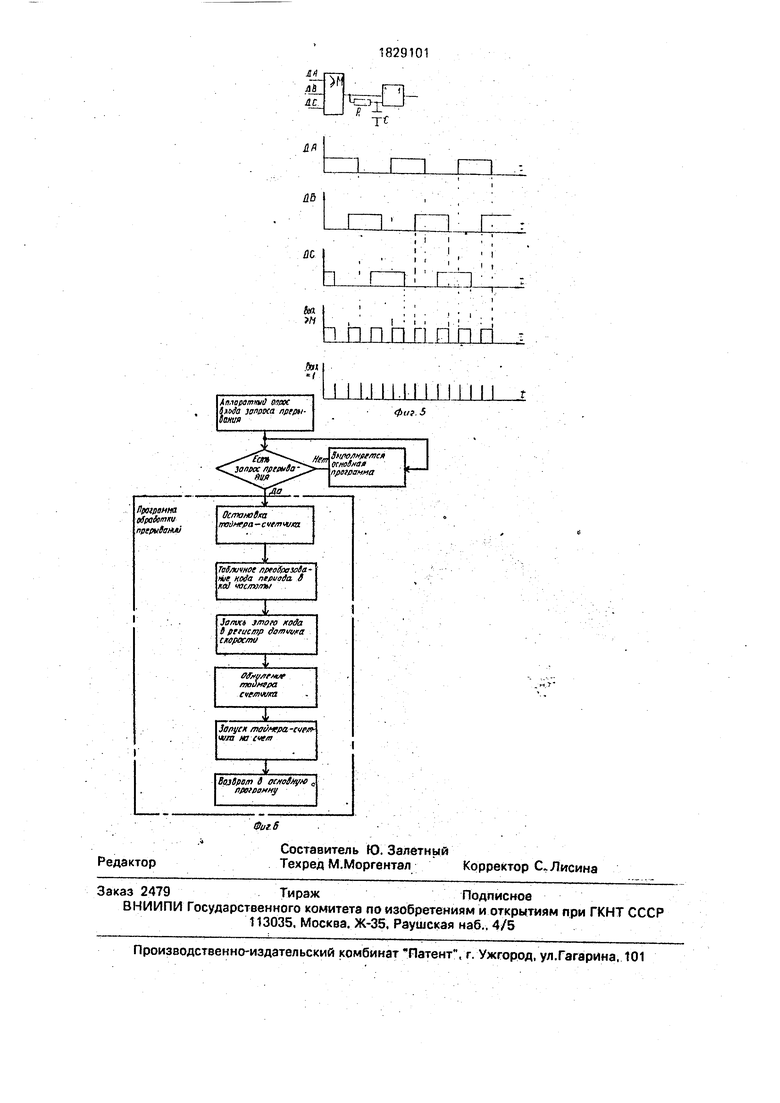
На фиг.1 представлена блок-схема позиционного электропривода; на фиг.2 - алгоритм работы электропривода; на фиг.З 5 алгоритм работы вычислителя в режиме контроля; на фиг.4-алгоритм работы рабочей программы; на фиг.5 - схема и диаграммы работы схемы ушестерения частоты.
На фиг. 6 приведен алгоритм работы цифрового датчика скорости.
Вентильный электропривод, содержит шину входного сигнала управления 1, соединенную с преобразователем входного напряжения в код 2 и первым входом аналогового ключа 3, выход которого соеди- нен со входом преобразователя напряжения обратной связи.по положению в код 4. выход которого соединен со вторым входом устройства определения ошибки рассогласования по положению 5 и устройством кон- троля &(первый вход), второй вход которого соединен с выходом преобразователя входного напряжения в код 2 и первым входом устройства определения ошибки рассогласования по положению 5. Третий вход уст- ройства контроля 6 соединен с шиной 7 сигнала Контроль..
Выход устройства 5 определения ошибки рассогласования по положению соединен с входами устройства определения требуемого направления вращения 8, устройства определения рассогласования по скорости 9, устройства определения зоны нечувствительности 10.
Выходы устройства определения зоны нечувствительности 10 и устройства определения рассогласования по скорости 9 соединены с входами реверсивного счетчика 11, выход которого соединен с входом пре образователя код-ШИМ 12, выход которо- го соединен с входом коммутатора вентильного двигателя 13 и четвертым входом устройства контроля 6. Выход устройства определения требуемого направления 8 соединен с входом устройства формирования направления вращения на коммутатор, второй вход которого соединен с выходом устройства определения истинного направления вращения 15. Последовательно соединены вентильный двигатель 16, исполнительный механизм 17, датчик положения 18, выход которого соединен с вторым входом аналогового ключа 3. Выход коммутатора вентильного двигателя 13 соединен с вентильным двигателем 16. Выходы датчика DA, DB, DC положения ротора (ДПР) коммутатора 13 через блок аналоговых ключей 19 соединены с входами схемы ушестерения частоты ДПР 20 и входами устройства определения истинного напра вле- ния вращения 15. Выходы формирователя контрольной частоты 21 соединены с второй группой входов блока аналоговых ключей 19, вход управления которыми соединен с первым выходом устройства контроля 6. Выходы транзисторных ключей коммутатора 13 вентильного двигателя соединены с пятым входом устройства контроля 6, второй выход которого соединен с входом управления аналоговым ключом 3. Выход
устройства контроля соединен с выходной шиной Исправность 22. Выход устройства формирования направления вращения на коммутатор 14 соединен с соответствующим входом коммутатора вентильного двигателя. Вход цифрового датчика скорости 23 соединен с выходом схемы ушестерения ча-. стоты ДПР 20, а выход соединен с входом устройства определения рассогласования по скорости 9, Генератор импульсов 24 выходом соединен с входом счета цифрового датчика скорости-10, Вычислитель 25 состоит из устройства определения ошибки рассогласования по положению 5, устройства определения требуемого направления вращения.8, устройства определения рассогласования по скорости 9, устройства контроля 6, устройства определения зоны нечувствительности 10, реверсивного счетчика 11, цифрового датчика скорости 23.
Вентильный электропривод работает следующим образом. При включении напряжения питания вычислитель электропривода производит предварительную установку регистров общего назначения, необходимых для хранения кода датчика скорости, кода управления, кода реверсивного счетчика, а затем устанавливается в режим ожидания сигнала Контроль.
После появления положительного напряжения на входе Контроль вычислитель переходит на программу предварительного контроля, которая проводит проверку функционирования основных блоков привода.
Принцип работы контроля состоит в следующем, Для проверки работоспособности преобразователя код-ШИМ в реверсивный счетчик записывается код, соответствующий полной раскрутке двигателя. Так как преобразователю код-ШИМ необходимо время для обработки этого кода, то пока он отрабатывает этот код вычислитель проводит проверку преобразователя входного напряжения в код. Для этого управление на преобразователь входного напряжения в код во время действия сигнала Контроль подается заранее оговоренное эталонное напряжение. Это напряжение преобразуется в код и считывается вычислителем. Вычислитель производит сравнение этого кода с контрольным кодом, который должен соответствовать подаваемому на вход контрольному напряжению. Если код преобразователя входного напряжения соответствует контрольному входу с заданным допуском, то происходит дальнейшая проверка. Теперь вычислитель проводит проверку выходного сигнала, отработанного преобразователем код-ШИМ. Если на выходе преобразователя код-ШИМ постоянный сигнал лог.О, что соответствует пол- ной раскрутке двигателя, то вычислитель пе реходит к.анализу работы преобразователя код-ШИМ в режиме динамического торможения. Для этого в реверсивный счетчик .записывается код, соответствующий режиму динамического торможения, Пока пре- образователь код-ШИМ отрабатывает этот код, вычислитель проводит проверку нулевого положения выходного вала исполнительного механизма. Для этого к вычислителю подключается преобразователь напряжения ОС по положению в код, на .который через аналоговый ключ поступает .сигнал сдатчика положения выходного вала механизма. Вычислитель считывает код с преобразователя напряжения ОС по положению в код и сравнивает его с нулем. Если этот код укладывается в заданные границы, то вычислитель считывает с преобразовате-. ля код-ШИМ сигнал и анализирует его, Если этот сигнал соответствует лог. 1, то преоб- разователь код-ШИМ функционирует нормально.
После этого: вычислитель проверяет работу коммутатора. Для этого он считывает с коммутатора комбинацию сигналов управления силовыми ключами и сравнивает ее с возможными при данном положении двигателя и данными входными сигналами коммутатора комбинациями.
Необходимо отметить, что весь контроль происходит при отсутствии силового питания на двигателе и коммутаторе, т.е. двигатель не работает и исполнительный механизм находится в нулевом положении. Затем вычислитель проводит проверку ра- ;боты преобразователя напряжения ОС по положению в код, для чего на него через аналоговый ключ, подается контрольный сигнал, находяи1ийся во время действия сигнала Контроль. На шине входного сигнала управления вычислитель считывает выходной код преобразователя напряжения ОС по положению в код и сравнивает его с контрольным с заданным допуском. После этого вычислитель проверяет работу датчика скорости. Для этого, с формирователя контрольной частоты через блок аналоговых ключей на схему ушестерения частоты дат- :Чйка положения ротора (ДПР) подаются три фазы формирователя контрольной .частоты, сдвинутые друг относительно друга на 120°, определенной частоты, имитирующие фазы ДПР./ .;
Вычислитель принимает эти импульсы, которые запускают цифровой датчик скорости, реализованный на таймере вычислителя. Принцип действия датчика скорости заключается в следующем. Импульс схемы
ушестерения частоты ДПР производит останов таймера-счетчика, запись его кода в регистр, обнуление таймера и запуск его на счет импульсов, поступающих с генератора
импульсов. Код записанный в регистр табличным способом преобразуется в код для реализации прямо пропорциональной за- вйсимости астота-код. Если в результате проверки кода датчика скорости он ерответ0 ствует контрольному, то значит датчик скорости функционирует нормально.
Если в результате проверки выявится какая-либо неисправность, на шину Исп- равность подается нулевое напряжение,
5 говорящее о том, что привод неисправен. Если привод исправен, то происходит переход на основную рабочую программу и на шину исправность выдается положительное напряжение.
0 Выполнение рабочей программы вычислителя начинается с опроса преобразователя входного напряжения в код и преобразователя напряжения ОС по положению в код, В случае работы рабочей про5 граммы, при отсутствии сигнала Контроль, через аналоговый ключ 3 проходит на преобразователь напряжения обратной связи по положению в код сигнал с датчика положения 18. Затем вычислитель отрабатывает
0 часть рабочей программы по определению управляющего воздействия на механизм в соответствии с заложенным алгоритмом. Работа возможного алгоритма рабочей программы. По приходу импульсов со схемы
5 ушестерения частоты запускается подпрограмма обработки прерываний, которая формирует код датчика скорости. В данном случае ушестерение частоты импульсов датчика положения .ротора (ДПР) вентильного
0 двигателя позволяет уменьшить интервал квантования по времени периода измерения скорости, что приводит к повышению быстродействия за счет более частого получения информации о скорости. Импульсы
5 трех датчиков положения ротора сдвинуты друг относительно друга на 120Ь и поступают на схему ушестерения частоты ДПР с коммутатора вентильного двигателя через блок аналоговых ключей.
0 Затем вычислитель-производит на основе значений кода датчика скорости и кода ошибки рассогласования по положению формирование управляющего воздействия на двигатель. Код управляющего воздейст5 вия поступает на преобразователь код- ШИМ, который преобразует этот код в ШИМ-сигнал, подаваемый на коммутатор вентильного двигателя.
По значению кода ошибки по положению определяется требуемое направление
вращения, которое поступает на устройство формирования направления вращения на коммутатор, на которое поступает также, сигнал о истинном направлении вращения с устройства формирования истинного на- 5 правления вращения. Устройство формирования направления вращения на коммутатор предназначено для того, чтобы обеспечить нормальную работу коммутатора, так как если на коммутатор подавать 10 требуемое направление вращения, а двигатель вращается в другую сторону; что бывает в районе зоны нечувствительности, то не обеспечивается режим динамического торможения двигателя из-за того, что последо- 15 вательность включения транзисторов коммутатора будет неверной. Поэтому в момент динамического торможения по сигналу ШИМ с преобразователем код-ШИМ осуществляется подача на коммутатор вен- 20 тильного двигателя истинного направления вращения, что обеспечивает динамическое торможение двигателя.
После выработки управляющих воздействий на коммутатор вентильного двигателя 25 происходит отработка двигателем и механизмом этих воздействий. При этом на потенциометре обратной связи по положению формируется новое значение сигнала ОС по положению, двигатель имеет другую скоро- 30 сть. . .. ..... .--.
. Процесс работы вычислителя начинает- ; ся сначала со считывания новых значений входного сигнала и сигнала ОС по положению.35
Рассмотрим более подробно возможный алгоритм работы рабочей программы. После считывания информации с преобразователя входного напряжения и информации с преобразователя напряжения обратной 40 связи вычислитель определяет модуль и знак разности этих кодов; Модуль этой разности определяет ошибку положения, а знак этой разности указывает направление уменьшения ошибки рассогласования по 45 положению, т.е. требуемое направление вращения. После этого вычислитель определяет, находится ли ошибка рассогласования по положению в зоне нечувствительности. Если ошибка рассогласования меньше зоны 50 нечувствительности, то реверсивный счетчик 11 устанавливается в положение, соответствующее полному динамическому торможению, для останова двигателя.
Если же ошибка рассогласования поло- 55 ложению больше зоны нечувствительности, то вычислитель определяет код ошибки по скорости, при этом код ошибки по положению является требуемым кодом скорости, а один из регистров используется для пострянного хранения значения кода дтгчика скорости, который реализуется на таймере вычислителя, путем подпрограммы преры- ваний по приходу импульсов со схемы уше- стерения частоты ДПР на вход запроса прерываний вычислителя. Алгоритм работы цифрового датчика скорости представлен на фиг.6.
Если код ошибки по скорости равен нулю, то происходит возврат на начало рабочей программы, если нет, то вычислитель определяет знак -ошибки по скорости, т.е. необходимо ли увеличить, или уменьшить скорость. Затем в зависимости от величины кода ошибки по скорости и от знака этой ошибки вычислитель изменяет код реверсивного счетчика, который является управляющим и поступает на вход преобразователя код- ШИМ. Вычислитель проверяет наличие единицы в каждом разряде кода ошибки по скорости. Если в старшем разряде кода ошибку по скорости находится единица, что говорит о большой ошибке, то вычислитель в зависимости от знака ошибки по скорости устанавливает реверсивный счетчик в состояние всех единиц или всех нулей, для более быстрого уменьшения ошибки по скорости. Если же старший разряд кода ошибки по скорости равен нулю, а следующий равен единице, т.е. ошибка меньше, то в реверсивный счетчик прибавляется или вычитается шесть единиц. Таким образом в зависимости от величины ошибки осуществляется более быстрое или более медленное изменение управляющего кода. За счет того, что при больших рассогласованиях большая скорость изменения кода управления, а при малых рассогласованиях малая, то повышается быстродействие системы без заметного увеличения перерегулирования системы. После того, как произошло изменение кода реверсивного счетчика, вычислитель выдает этот код на преобразователь код-ШИМ. и выдает требуемое направление вращения на устройство формирования направления вращения на коммутатор. Затем процесс работы вычислителя повторяется. Отметим, что данный алгоритм является одним из возможных, и может быть легко модифицирован для различных систем управления, отличающимися требованиями по динамике и точности.
В качестве вычислителя в предлагаемом устройстве используется однокристальная микроЗВМ серии № 1816.
.Формула изобретения
Вентильный электропривод, содержащий электродвигатель с датчиком положения ротора, датчик скорости электродвигателя, последовательно соединенные преобразователь код-ШИМ и коммутатор; выход которого подключен к электродвигателю, генератор импульсов, отличающийся тем, что, с целью повышения быстродействия, повышения надёжности за счет предварительного контроля работоспособности, расширения оьласти использования, в него введены датчик положения и исполнительного механизма, последовательно соединенные шина входного сигнала управления, преобразователь входного, напряжения в код, устройство определения ошибки рассогласования по положению/ устройство определения рассогласования по скорости и реверсивный счетчик, последовательно соединенные аналоговый ключ, преобразователь напряжения обратной связи по положению в код и устройство контроля, устройство определения требуемого направления вращения, устройство определения зоны нечувствительности, по- . следовательно соединенные формирова- . тель контрольной частоты, блок аналоговых кл ючей и схема ушестерения частоты датчика положения ротора, устройство определения истинного направления вращения, устройство .формирования сигнала направ-. ления вращения на коммутатор, шина сигнала контроля, первый вход аналогового ключа соединен с шиной входного сигнала управления, а второй вход - с выходом датчика положения, выход преобразователя напряжения обратной связи по положению в/код подключен к второму входу устройства определения ошибки рассогласования по положению, первый вход которого соединен с вторым входом устройства контроля, третьим входом подключенного к шине сигнала контроля и четвертому входу блока аналоговых ключей, выходы которого соединены с соответствующими входами устройства определения истинного направления вращения, а входы DA, DB и DC блока аналоговых ключей подключены к выходам
DA, D.B и DC коммутатора, второй выход которого соединен с пятым входом устройства контроля, входы DA, DB и DC подключены к соответствующим выходам датчика . положения ротора, второй вход коммутатора соединен с выходом устройства формирования сигнала направления вращения на коммутатор, первый вход которого подключен к выходу устройства определения истинного направления вращения, второй вход соединен с четвертым входом устройства контроля и выходом преобразователя код-ШИМ, третий вход - с выходом устройства определения требуемого направления вращения, вход которого подключей к выходу устройства определения ошибки рассогласования по положению и к входу устройства определения зоны нечувствительности, выходом соединенного с вторым входом реверсивного счетчика, тре
тий вход которого подключен к третьему выходу устройства контроля, а выход реверсивного счетчика соединен с входом, преобразователя код-ШИМ, датчик скорости электродвигателя выполнен цифровым
и первым входом подключен к выходу генератора импульсов, вторым входом - к выходу схемы ушестерения частоты датчика положения ротора, первый выход датчика скорости подключен к второму входу устройства определения рассогласования по скорости, второй выход датчика скорости соединен с шестым входом устройства контроля, второй выход которого подключен к выходной шине Неисправность, третий
вход аналогового ключа соединен с первым выходом устройства контроля.
Начало3
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ОБЪЕКТА С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2537957C2 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Система управления приводами антенны станции наведения | 2022 |
|
RU2794200C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |

Использование: в автоматике, в частности в технике управления вентильными позиционными электроприводами постоянного тока, управляемыми от вычислителя. Сущность; после того, как произошло изменение кода реверсивного счетчика, вычислитель выдает этот код на преобразователь код-ШИМ и требуемое направление вращения на устройство формирования направления вращения на коммутатор. Затем процесс работы вычислителя повторяется. Данный алгоритм является одним из возможных и может быть легко модифицирован для различных систем управления, отличающихся требованиями по динамике и точности. Тестовый контроль позволяет вычислителю, с которым работает электропривод, определить его работоспособность и, в случае неисправности, включить резерв. 6 ил. 15
ЕЈ
ЦрдЗвдительная ycmcwoffxa Putt
Пробед&шё рредЗарительного контрыя
Считыйаме ci/iw/ia по положению
Dfpafiomw SNWMumeMM одйочей программы по определения уп/яШянхме& 6оздейся 8(ге на механизм г
Фаёгшоодамие кода. . щтчищ скорости
ОБдаЬотка дмчислщгхлем apofpattMtf ptp- HuffoSartM упрабмюыего faded смоця дЯигатель. .
Рреоо разодание ко fa управляющего Шдейстбия о U1UM сигнал
Формирование ипраВАя/оии/х сигналов на dffi/гатвль
L
BfpaSomxa исмлни/ямьн. механизмом дходном
контроля
Контрольная программа
Есть
Выдача сигнала, rteuf/ipaff/focmi
-э/ Конец Л
Ра$очая программа
ОС
Формирование сигнала ОС па скорое/т/
Пришла, Команда Конт/ю ь ,Да
Установка dftEflepc. cve/nwx хода, соо/пд. помой раскрутке двигателя
ж
PQOi
Po&xAtoueritse лрер&азоВп/пеля ухоотг напряжения 8 ли/
Считывание лрер оазова/пеля Sxoti/tozo напряжения о xod
Уетмодха о реверс, сче/ятх к о da, соомд. Динамическом / /порно,емс 6игатем
3k Пойхмоуение преобразователя 0с д0 лала#е- ним У.too- - I
3EI
Cwff t/0fffft/e ло по положению о
iff с, лреооразоВателя 0с хоа
Считывание с хомнуталюра сигналов длрс/длетя силовыми KA/OVO/W
Раден/ИГ
jwd o m00/ibm y
Тйюхлюие/ше к преобразобзгпелн) ОС ло ЛОАО- женин д ко( кон/пролбу малрджения
-.-
,чи/лыВа/юе с лреодразоОамеля рс
мр положению В та
/Й577
Не/
№т
№/п
tfem
№я
Фармщ о$аниесигн. УеосгюабмкяП
Предёарш цстанойка
«атг -г--TipaSepKa (
е тулярния комары
±
ICititnySaMuf информации с /ipfoSpaio famfaoSi. наюахееаиа 1У&,1 . . I
$iui«t,itaHutvu pi puouuu 0одЛоозов
/«AM Hunt Oap CWtU fUx/
J.
Onpe3taf ai peiuoc.ma a5ca/nonwt n JHtlHtH Шж. a. t&e.
Qnpt3etientie aenpaSeftiUQ Spautf надI
±
мации с /ipfoSpaio ееаиа 1У&,1 . . I
ilpoieSsmf (jipcmufoStwua приоол
домчана скорости
J.
QnpsHSjltuue кода ашиока по
СКОРОСГПЦ
uft
гл.
I
t
ill
1 , I
П ГЛ. ГЛ :; I , :
b-b п п rlri h n
.a
-r
An,wpamn/il Мок todd запроса nptpti- tow/
т I-Г. m
I
t
:;
I 11.11 II III II t фч}.5
| Авторское свидетельство СССР № 1667343.кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| В.В.Хрущев | |||
| Электрические машины систем автоматики, Л.: Энергоэтомиздат, Ленинградское отделение | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Соломорезка | 1918 |
|
SU157A1 |
