СлЭ
СХ5
Изобретение относится к электро- технике и может быть использовано при построении электропривода с синх ройными машинами (двигатели с неяв невыраженными полюсами, синхронные редукторные двигатели аксиального и радиального типов) с расширенным диапазоном регулирования частоты враще- ния.
Целью изобретения является расши- рение диапазона регулирования частоты вращения в условиях ограничения по напряжению силового источника пи- тания.
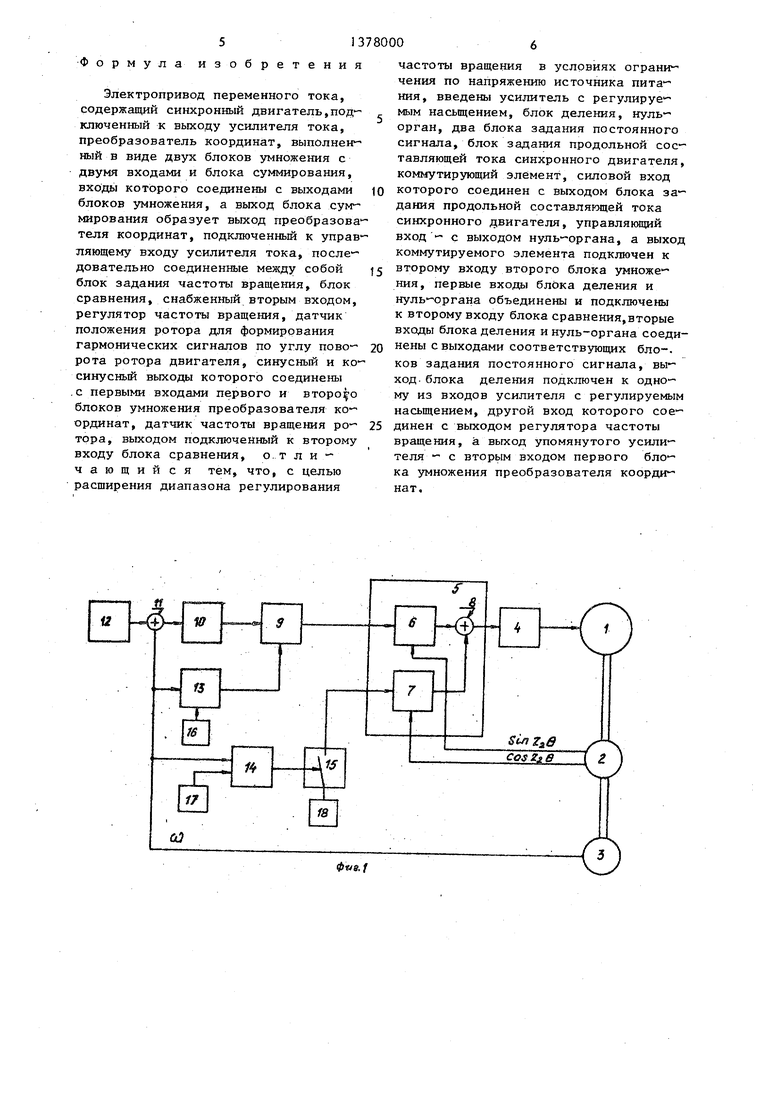
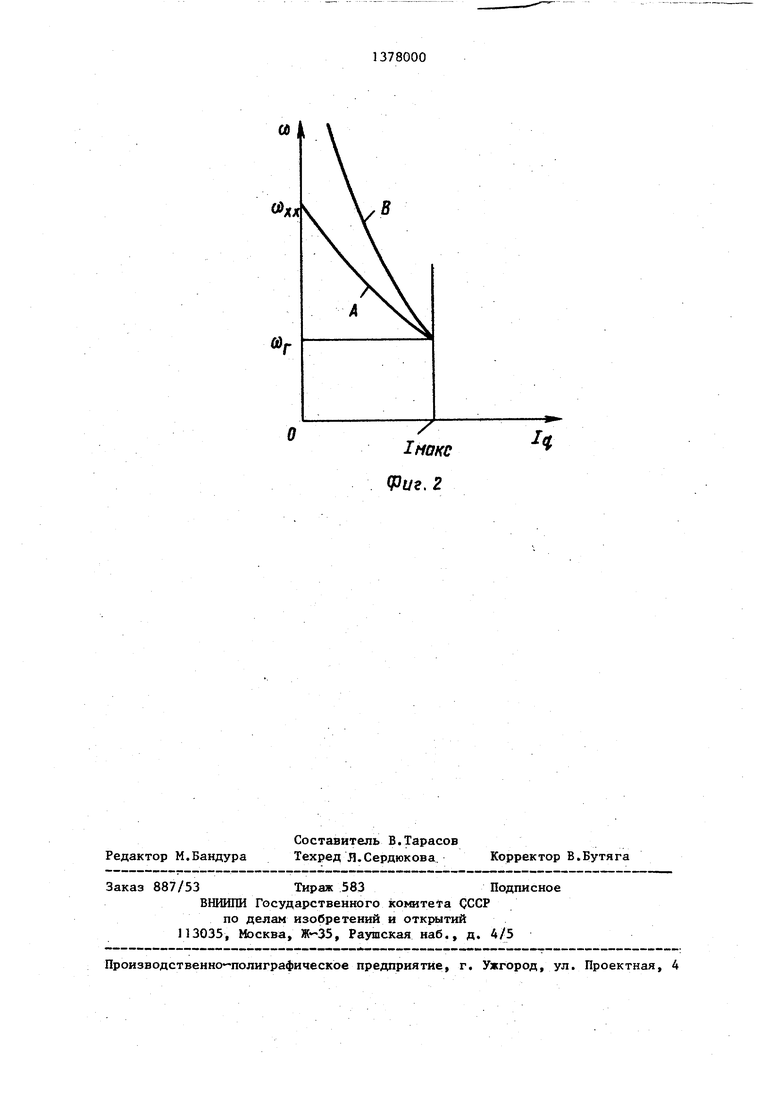
На фиг.1 показана функциональная схема электропривода; на фиг.2 ка- чествени 1е предельные механические характеристики электропривода.
Электропривод содержит синхронный двигатель 1, датчик 2 положения ротора, датчик 3 частоты вращения, усилитель 4 тока, преобразователь 5 коор20 Блок 11 сравнения вырабатывает сигнал ошибки между требуемой частотой, вращения ротора, задаваемой блоком 12, и реальной, измерение которой осуществляется с помощью датчика 3
динат, в состав которого входят два
блока 6, 7 умножения и блок 8 сумми- 25 частоты вращения. Этот сигнал ошибки рования. В электропривод введены уси- поступает на вход регулятора 10 час- литель 9 с регулируемым насыщением, регулятор 10 частоты вращения, элемент 11 сравнения, задатчик 12 частоты вращения, блок 13 деления, нуль- ЗО орган 14, коммутирующий элемент 15, блоки, 16, 17 задания постоянного сигнала
., блок 18 задания продольной составляющей тока статора синхронного
двигателя. I
Синхронный двигатель 1, датчик 2
положения ротора и датчик 3 частоты расположены на общем валу. Якорная обмотка двигателя 1 подключена к выходу усилителя 4 тока, чей вход соединен с выходом преобразователя 5 координат, образованным выходом блока 8 суммирования. Входы последнего подключены к выходам первого и второ-
тоты вращения, выходной сигнал которого задает момент двигателя I. Ротор последнего начинает вращаться, уменьшая ошибку на выходе блока 11 сравнения, В области низких частот вращения, когда последняя меньше некоторой граничной (сэ СО г), нуль-орган 14 находится в состоянии О.
35 Его выходной сигнал поступает на управляющий вход коммутирующего элемента 15 и переводит последний в разомкнутое состояние. Следовательно, на второй вход блока 7 умножения по-
40 ступает нулевой сигнал. Входной сигнал блока 7 умножения задает продольную составляющую тока синхронного двигателя 1, а значит, эта составляющая будет равна нулю при СО СО.
усилителя 9 подключен к выходу блока
13деления, первый вход которого объединен с первым входом нуль-орга-
на 14 и подключен к выходу датчика 3 частоты вращения. Выход нуль-органа
14соединен с управляющим входом коммутирующего элемента 15. Вторые входы блока 13 деления и нуль-органа 14
подключены к выходам блоков 16 и 17 соответственно. Силовой вход коммути рующего элемента соединен с выходом блока 18 задания продольной составляющей тока синхронного двигателя, а
выход - с вторым входом второго блока 7 умножения.
Электропривод работает следующим образом.
Блок 11 сравнения вырабатывает сигнал ошибки между требуемой частотой, вращения ротора, задаваемой блоком 12, и реальной, измерение которой осуществляется с помощью датчика 3
частоты вращения. Этот сигнал ошибки поступает на вход регулятора 10 час-
частоты вращения. Этот сигнал ошибки поступает на вход регулятора 10 час-
тоты вращения, выходной сигнал которого задает момент двигателя I. Ротор последнего начинает вращаться, уменьшая ошибку на выходе блока 11 сравнения, В области низких частот вращения, когда последняя меньше некоторой граничной (сэ СО г), нуль-орган 14 находится в состоянии О.
Его выходной сигнал поступает на управляющий вход коммутирующего элемента 15 и переводит последний в разомкнутое состояние. Следовательно, на второй вход блока 7 умножения по-
ступает нулевой сигнал. Входной сигнал блока 7 умножения задает продольную составляющую тока синхронного двигателя 1, а значит, эта составляющая будет равна нулю при СО СО.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1985 |
|
SU1264294A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Электропривод переменного тока | 1986 |
|
SU1427541A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Вентильный электропривод | 1984 |
|
SU1277341A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для регулирования возбуждения синхронного двигателя | 1975 |
|
SU604113A1 |
| Электропривод переменного тока | 1985 |
|
SU1275732A1 |
Изобретение относится к электро технике. Целью изобретения является расширение диапазона регулирования частоты вращения в условиях ограниче-- ния по напряжению силового источника питания. Указанная цель достигается введением в электропривод переменно го тока усилителя 9 с регулируемым насьщением, блока деления 13, нуль- органа 14, коммутирующего элемен та 15, блоков 16, 17 задания постоян ных сигналов и.блока 18 задания про дольной составляющей тока статора синхроннсзго двигателя 1. В области высоких частот вращения нуль-Морган 14 замыкает коммутирующий элемент 15. На вход преобразователя координат 5 поступает задание по продольной сос- тавляющей тока статора синхронного двигателя 1. В результате увеличива- ется максимальное значение попереч ной составляющей якорного тока. Что-- бы увеличение было максимальным, не- обходимо ограничить требуемое значе- а ние момента величиной,обратной пропор- - циональной частоте вращения, это- . го и введены блок деления 13 и уси литель 9, уровень выходного сигнала которого регулируется блоком ния 13. 2 ил. (Л
го блоков 6 и 7 умножения. Первые 45 Выходной сигнал блока 13 деления в
входы блоков 6 и 7 соединены с синусными и косинусными выходами датчика 2 положения ротора соответственно. Второй вход первого блока 6 умножения подключен к выходу усилителя 9 с регу лируе1Ф1М насыщением, чей вход соединен с выходом регулятора 10 частоты вращения. Вход регулятора 10 частоты вращения подключен к выходу блока-11 сравнения, один вход которого соеди нен с выходом задатчика 12 частоты вращения, а другой - с выходом датчика 3 частоты вращения. Вход регулирования, уровня насыщения (второй вход)
0
5
этом режиме равен постоянной величине, поскольку происходит деление на сигнал малой величины, пропорциональной частоте вращения. Блок деления настраивается так, чтобы он свои непосредственные функции начинал выполнять при СО ОЭр, а при СО СОр он находился в насыщении, которое всегда существует у реальных элементов. Выходной сигнал блока 13 деления задает постоянный уровень насыщения усилителя 9, величина которого выбирается исходя из максимально допустимого тока двигателя.
При фиксированном мпксимальном токе момент двигателя
М К 1,(1)
где К - постоянный коэффициент;
I - поперечная составляющая тока двигателя, которая совпадает с амплитудой фазного тока при продольной составляющей Ij 0.
будет максимальным именно при Ij 0. Однако при увеличении требуемой частоты вращения при Ij О, начиная с некоторой частоты вращения со со,, ЭДС возрастает до такой вели- чины, что ток на уровне допустимого уже невозможно сформировать, поскольку величина максимального напряжения источника питания усилителя тока всегда имеет конечную величину. Предельная механическая характеристика для этого случая имеет вид А (фиг,2). При уменьшении момента до нуля частота вращения возрастает до некоторой скорости холостого хода СО. В данном устройстве приса сОг нуль-орган 14 принимает состояние 1. Коммутирующий элемент 15 переводится в замкнутое состояние. В результате в двигателе задается постоянное значение продольной составляющей тока статора размагничивающего действия. Ее введение компенсирует ЭДС вращения в обмотке, а следовательно, возрастает эквивалентный запас по Напряжению источника питания. Предельная механическая характерис- тика для этого случая имеет вид В (фиг,2).
Момент двигателя определяется выражением (1), Но поскольку при увеличении частоты вращения допустимый момент уменьшается (кривая В, фиг.2), его сигнал задания (или что то же самое, задание на поперечную составляющую тока) также необходимо ограничить. Это осуществляется с помощью блока 13 деления, выходной сигнал которого в зависимости от текущей частоты вращения задает уровень насыщения усилителя 9. Блок 9 ограю1чива- ет сигнал задания момента, фор1«1руе- мого регулятором 10 частоты вращения именно в соответствии с кривой В
Эффективность рассмотренного алгоритма функционирования электроприао- да можно доказать, используя уравнения машины в осях d и q, Модуйь напряжения при
равен
(RI +LZ coIj+i )-i-(.
(2)
аV
где R,L - активное сопротивление и индуктивность якорной обмотки;
Z. - коэффициент электромагнитной редукции у синхронных редукторных мащин или число пар полюсов у машины классического типа; if - ток обмотки возбуждения; L - взаимная индуктивность
якорной и обмотки возбуждения.
Величина (i Z, W L) - модуль ЭДС вращения.
Предельные механические характеристики можно получить на основе выражения (2), если вместо U подставить величину максимального напряжения источника питания U, С учетом того, что обычно падение напряжения на активном сопротивлении при допус-: ТИМОМ токе значительно меньше величины и , из (2) получаем
(LZ coIj+ifZ uL f-b( ,
При Ij О предельная механическая характеристики (кривая А,фиг.2) определяется следующим выражением: Ufl/2
-JCiiZ,.(LZ,I) Из (3), в частности, следует, что
и
40
Lm . - --- If ,
45
(4)
Именно в соответствии с последним выражением приведена кривая В. Частота вращения при Ij Ij больше, чем при Ij О, как следует из сопоставления выражений (3) и (4) при фиксцг рованной величине 3 , в oi раз.
5
об
1 +
Ln, L
Н
Таким образом, предлагаемый электропривод при источнике питания с ограничением напряжения имеет более широкий диапазон регулирования частоты вращения.
Формула изобретения
Электропривод переменного тока, содержащий синхронный двигатель,под- ключенный к выходу усилителя тока, преобразователь координат, выполнен ный в виде двух блоков умножения с двумя входами и блока суммирования, входы которого соединены с выходами блоков умножения, а выход блока сум мирования образует выход преобразова теля координат, подключенный к управ ляющему входу усилителя тока, последовательно соединенные между собой блок задания частоты вращения, блок сравнения, снабженный вторым входом, регулятор частоты вращения, датчик положения ротора для формирования гармонических сигналов по углу пово- рота ротора двигателя, синусный и косинусный выходы которого соединены .с первыми входами первого и второго блоков умножения преобразователя ко- ординат, датчик частоты вращения ро- тора, выходом подключенный к второму входу блока сравнения, о. т л и - чающийся тем, что, с целью расщирения диапазона регулирования
.f
частоты вращения в условиях ограничения по напряжению источника питания, введены усилитель с регулируемым насыщением, блок деления, нуль- орган, два блока задания постоянного сигнала, блок задания продольной составляющей тока синхронного двигателя, коммутирующий элемент, силовой вход которого соединен с выходом блока задания продольной составляющей тока синхронного двигателя, управлянмций вход - с выходом нуль-органа, а выход коммутируемого элемента подключен к второму входу второго блока умножения, первые входы блока деления и нуль-органа объединены и подключены к второму входу блока сравнения,вторые входы блока деления и нуль-органа соединены с выходами соответствующих бло-. ков задания постоянного сигнала, выход- блока деления подключен к одному из входов усилителя с регулируемым насыщением, другой вход которого соединен с выходом регулятора частоты враще1шя, а выход упомянутого усилителя - с вторым входом первого блока умножения преобразователя координат.
V
Л Г-1 Л
4 --ч 1
Ч
Фиг. г
| Бродовский В.Н., Иванов E.G | |||
| Приводы с частотнотоловым управлени ем | |||
| M.V Энергия, 1974 | |||
| Электропривод с частотно-токовым управлением | 1982 |
|
SU1067584A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
