Изобретение относится к устройствам для транспортирования изделий по технологическим позициям автоматических и механизированных линий круглой компоновки для химической и электрохимической обработки поверхности основного металла и получения металлических и неметаллических покрытий.
Изобретение может быть использовано для оборудования цехов электрохимических покрытий в радио и электротехнической, электронной, часовой и других отраслях промышленности,
Известен консольный автооператор, состоящий из сварного корпуса, механизма горизонтального перемещения, вертикальных направляющих, консольной каретки с грузозахватом, связанной цепной передачей с грузоподъемным механизмом, кабе- лепротягивающего устройства, панели ручного управления.
Такой автооператор может быть использован для однорядного расположения ванн.
Известен автооператор с программным управлением, состоящий из расположенных по окружности стационарных ванн, центральной колонны, двух операторов кранового типа с телескопическими устройствами, укрепленными на колонне независимо один от другого и снабженных отдельными приводами.
В известном техническом решении привода горизонтального перемещения операторов и управления телескопическими устройствами расположены на самом операторе, что приводит к усилению конструкции, а следовательно, и к увеличению его металлоемкости.
Наличие телескопических устройств и устройств для контрактного подвода электропитания к приводам усложняет конструкцию оператора.
Целью изобретения является упрощение конструкции и уменьшение металлоемкости автооператора.
Поставленная цель достигается тем, что автооператор для гальванических ванн, содержащий платформу, центральную пустотелую колонну, две консоли, механизмы вертикального и горизонтального перемещения консолей с приводами, систему управления, согласно изобретению, центральная пустотелая колонна выполнена с продольными прорезями, снабжена винтами, плавающими гайками, кольцами, втулками и муфтами с тягами, причем плавающие гайки соединены с втулками посредством пальцев, размещенных в продольных прорезях, на втулках установлены муфты, шарнирно соединенные тягами с консолями, при этом
плавающие гайки установлены на винтах, соединенных с приводами механизмов вертикального перемещения, а механизм горизонтального перемещения выполнен с
дополнительными муфтами, многопрорезными стопорным колесом и крестом мальтийского механизма и колеса с цевкой и запирающей дугой, причем дополнительные муфты шарнирно соединены с консоля0 ми, многопрорезное стопорное колесо и крест мальтийского механизма жестко соединены между собой, а колесо с цевкой и запирающей дугой соединено с приводом механизма горизонтального перемещения
5 и установлено с возможностью взаимодействия с крестом мальтийского механизма.
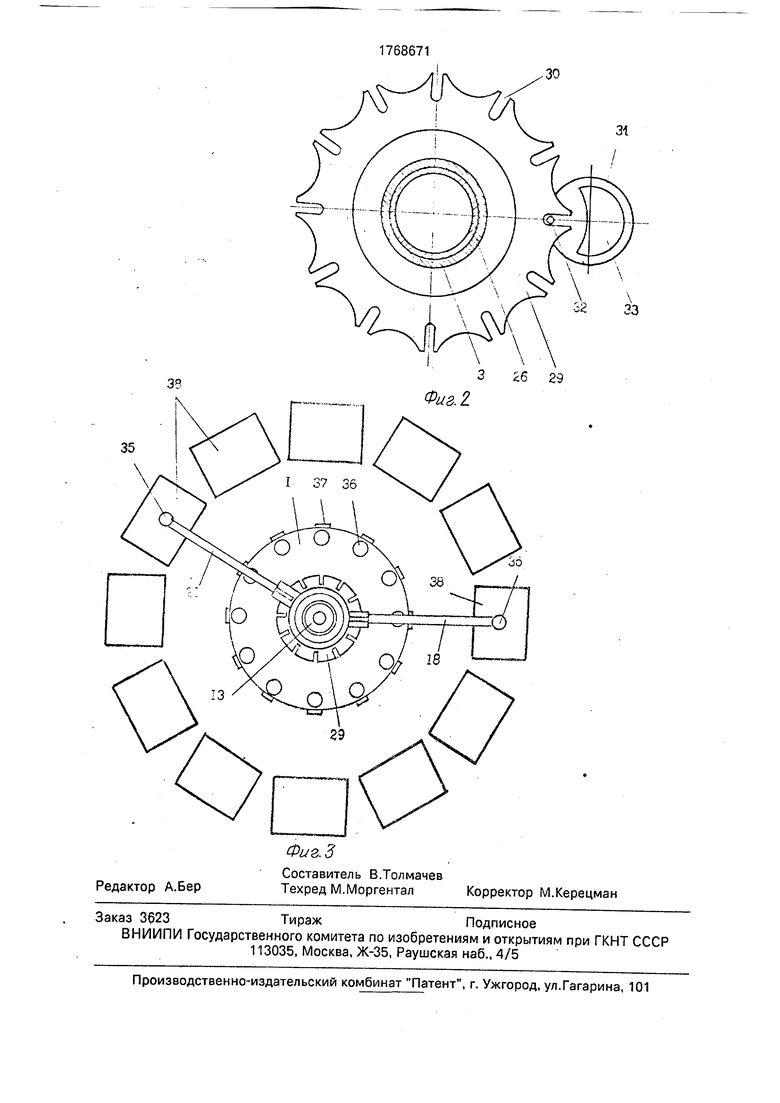
На фиг. 1 представлен боковой вид автооператора в разрезе; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - план расположения
0 линии.
Автооператор содержит платформу 1, на котор )й установлено основание 2 с пустотелой колонной 3, снабженной прорезями 4 и 5. На колоне размещены втулки 6 и 7,
5 соединенные при помощи пальцев 8 и 9 с плавающими гайками 10 и 11. Гайка Юснаб- жены винтом 12, соединенным с приводом 13, а гайка 11 снабжена винтом 14, соединенным с приводом 15. На втулке 6 разме0 щена муфта 16, шзрнирносоединенная при помощи тяги 17 с консолью 18, а на втулке 7 размещена муфта 19, шарнирно соединенная при помощи тяги 20 с консолью 21. Консоли 18 и 21 шарнирьо закреплены в
5 дополнительных муфтах 22 и 23 и снабжены стопорами 24 и 25. Дополнительные муфты 22 и 23 размещены на втулке 26 с возможностью свободного проворачивания относительно друг-друга и втулки 26, которая в
0 свою очередь свободно проворачивается вокруг колонны 3. С втулкой 26 жестко скреплены стопорное колесо 27 с прорезями 28 и крест 29 мальтийского механизма с пазмами 30.
5 Колесо 31 с иевкой 32 и запирающей дугой 33 размещено на платформе 1 и соединено с приводом 34.
Каждая консоль 18 и 21 снабжена устройством 35 для захвата подвески с издели0 ями (не показана),
На платформе 1 (фиг, 3) установлены устройства 36 для вибрации консоли и устройства 37 для точной фиксации консолей. Линия состоит из гальванических ванн
5 38, расположенных по кольцу.
Автооператор работает следующим образом. При включении привода 13 на подъем вращается винт 12, который взаимодействуя с гайкой 10 перемещает ее вверх. Одновременно, соединенная при помощи
пальцев 8 с гайкой 10 перемещается втулка 6, а расположенная на ней муфта 16 при помощи тяги 17 подымает консоль 18, на которой устройством 35 удерживается под- вестка с изделиями (не показана). При подъ- еме консоли 18 стопор 24 входит в одну из прорезей 28 стопорного колеса 27 и, достигнув определенного положения консоли, привод 13 отключается. Для горизонтального перемещения консоли 18 на другую пози- цию включают привод 34, который вращает в заданном направлении колесо 31. Цевка 32, расположенная на этом колесе, входит в один из пазов 30 креста 29 и проворачивает его на определенный угол, соответствую- щий перемещению консоли 18 на одну соседнюю позицию. При полном обороте колеса 31 цевка 32 выходит из паза, а крест запирается дугой 33, что исключает его самопроизвольный разворот. Совместно с крестом 29 проворачивается втулка 26, а вместе с ней и стопорное колесо 27, которое, воздействуя на стопор 24, поворачивает консоль 18. Совместно с консолью проворачиваются муфты 22 и 16.
Так как число пазов креста 29 и число прорезей стопорного колеса 27 соответствует числу позиций линии, то за один полный оборот колеса 31, консоль 18 перемещается на соседнюю позицию в ту или другую сторону, взависимости от направления вращения привода 34.
При перемещении консоли 18 на более дальнюю позицию требуется и соответствующее число оборотов колеса 31. В период установления консоли 18 над требуемой позицией (ванной 38) привод 34 отключается.
Опускание консоли 18 осуществляется путем вращения привода 13 в противоположную сторону. При этом вращением вин- та 12 плавающая гайка опускается, вместе с ней опускается втулка 6 и муфта 16 с тягой 17. С опусканием консоли 18 стопор 24 выходит из прорези 28 стопорного колеса 27, консоль входит в фиксатор 37 (фиг, 3) точно- го положения на позиции (ванны 38), а привод 13 отключается. При необходимости
включается устройство 37 для вибрации консоли.
Аналогичным образом осуществляется подъем, горизонтальное перемещение и опускание консоли 21.
Перемещение консолей 18 и 21 в вертикальном и горизонтальном направлениях может иметь разнообразные комбинации, соответствующие выполнению технологических операций по заданной циклограмме.
Включение и отключение приводов 13, 15 и 34 осуществляется известными системами управления автооператорами.
Формула изобретения Автооператор для гальванических ванн, содержащий платформу, центральную пустотелую колонну, две консоли, механизмы вертикального и горизонтального перемещения консолей с приводами, систему управления, отличающийся тем, что, с целью упрощения конструкции и снижения металлоемкости, центральная пустотелая колонна выполнена с продольными прорезями, винтами, плавающими гайками, пальцами, втулками и муфтами с тягами, причем плавающие гайки соединены с втулками посредством пальцев, размещенных в продольных прорезях, на втулках установлены муфты, шарнирно соединенные тягами с консолями, при этом плавающие гайки установлены на винтах, соединенных с приводами механизмов вертикального перемещения, а механизм горизонтального перемещения выполнен с дополнительными муфтами, многопрорезными стопорным колесом и крестом мальтийского механизма и колесом с цевкой и запирающей дугой, причем дополнительные муфты шарнирно соединены с консолями, многопрорезные стопорное колесо и крест мальтийского механизма жестко соединены между собой, а колесо с цевкой и запирающей дугой соединено с приводом механизма горизонтального перемещения и установлено с возможностью взаимодействия с крестом мальтийского механизма.
3
35
3 Яб 29
Фиг. 2.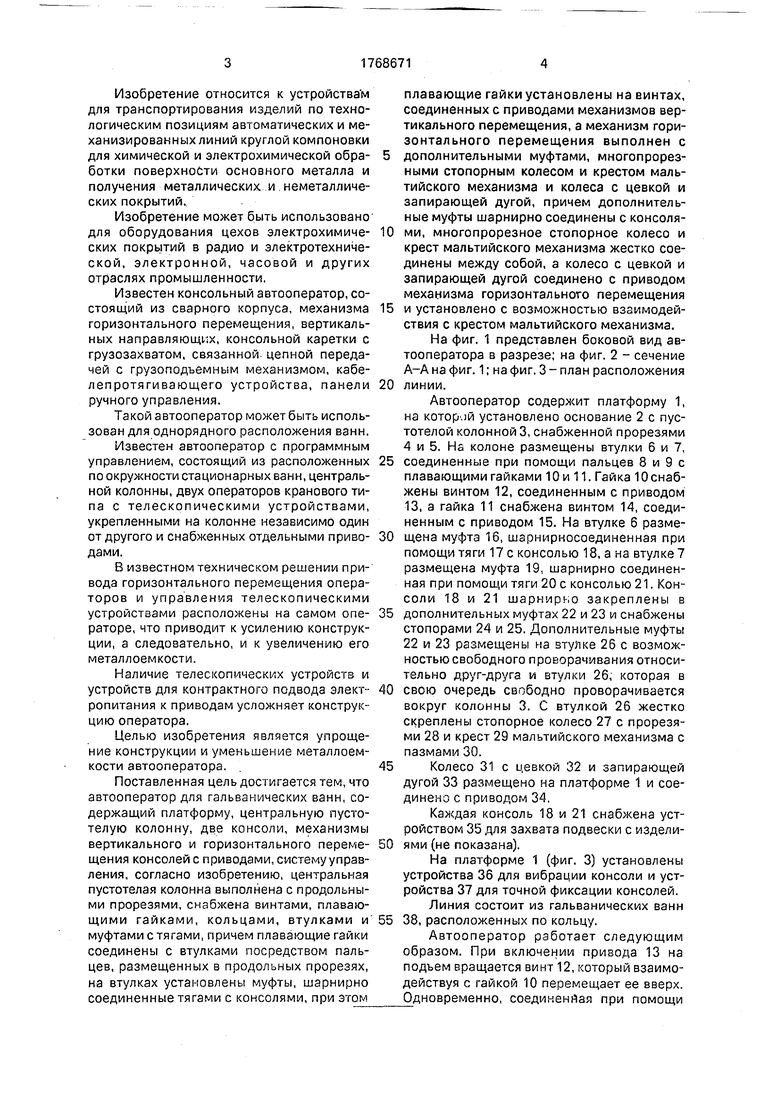

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1990 |
|
RU2035268C1 |
| Привод подачи рабочего органа | 1983 |
|
SU1114516A1 |
| Поворотное устройство | 1985 |
|
SU1293429A1 |
| Устройство для прессования порошковых материалов | 1991 |
|
SU1834811A3 |
| Многопозиционный, многошпиндельный полуавтоматический станок карусельного типа | 1960 |
|
SU139898A1 |
| Мальтийский механизм | 1982 |
|
SU1084521A1 |
| МАШИНА ДЛЯ ФРАНКИРОВАНИЯ ПОЧТОВЫХ ПАКЕТОВ | 1970 |
|
SU280365A1 |
| Загрузочное устройство | 1987 |
|
SU1509222A1 |
Сущность изобретения: в автооператоре для гальванических ванн центральную пустотелую колонну 3 выполняют с продольными прорезями 4 и 5, винтами 12 и 14, плавающими гайками 10 и 11, пальцами 8 и 9 втулками 6 и 7, и муфтами 16 и 19, с тягами 17 и 20, плавающие гайки 10 и 11 соединены с втулками 6 и 7 посредством пальцев 8 и 9, размещенных в продольных прорезях 4 и 5. На втулках 6 и 7 установлены муфты 8 и 9, шарнирно соединенные тягами 17 и 20 с консолями 18 и 21. Плавающие гайки установлены на винтах 12 и 14,соединенных с приводами 13 и 15 механизмов вертикального перемещения, а механизм горизонтального перемещения выполнен с дополнительными муфтами 22 и 23, многопрорезными стопорным колесом 27 и крестом 29 мальтийского механизма и колеса 31с цевкой 32 и запирающей дугой 31, дополнительные муфты 22 и 23 шарнирно соединены с консолями 18 и 21, многопрорезные стопорное колесо 27 и крест 29 мальтийского механизма, жестко соединены между собой, а колесо 31 с цевкой 32 и запирающей дугой 22 соединено с приводом 34 механизма горизонтального перемещения и установлено с возможностью взаимодействия с крестом 29 мальтийского механизма. 3 ил. .13 (/ с ю Г6 1 о 00 CN 4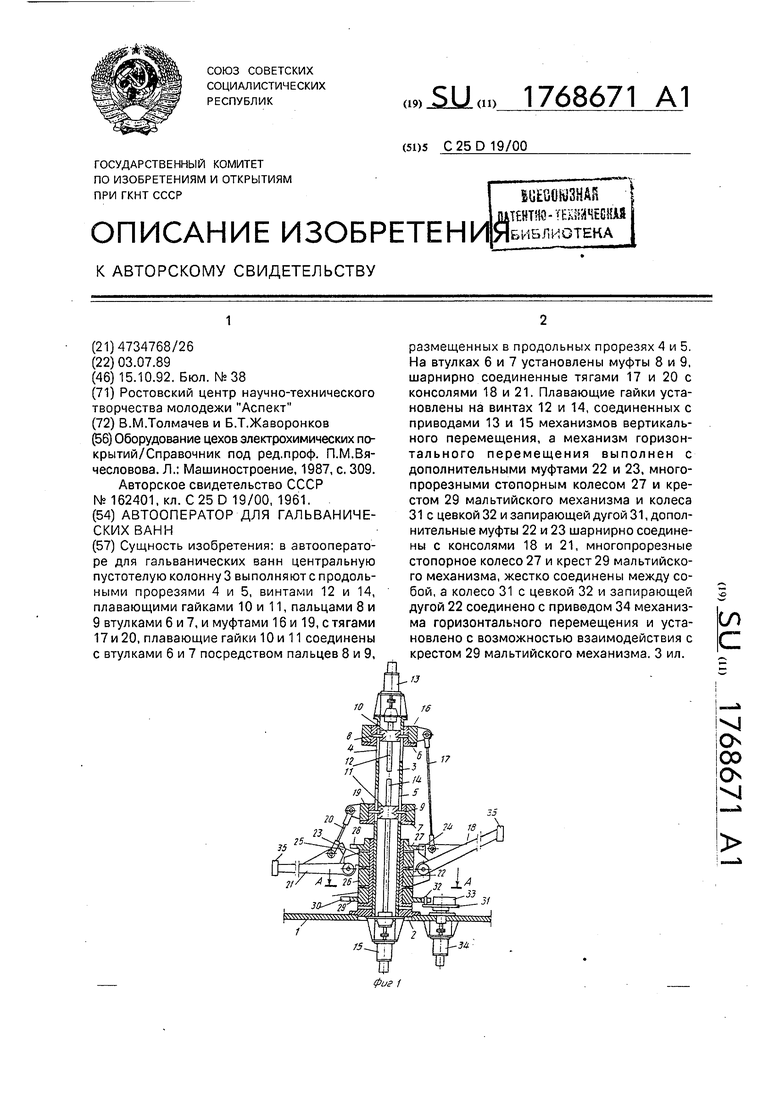
| Оборудование цехов электрохимических покрытий/Справочник под ред.проф | |||
| П.М.Вя- чесловова | |||
| Л.: Машиностроение, 1987, с | |||
| Переставная шейка для вала | 1921 |
|
SU309A1 |
| 0 |
|
SU162401A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
