Изобретение относится к электротехнике и может быть использовано при разработке качественных систем управления частотно-регулируемыми асинхронными двигателями, а также в тех случаях, когда требуется измерить момент, разбиваемый асинхронным двигателем.
При определении электромагнитного момента были поставлены условия: момент определяется без операции интегрирования, так как последняя приводит к накоплению ошибок и момент определяется без использования активного сопротивления двигателя, так как оно существенно меняется при изменении теплового состояния двигателя.
Электромагнитный момент асинхронного двигателя определяется вектором произведением одной из пар следующих векторов: потокосцепления ротора, статора, воздушного зазора, тока статора и тока ротора, наиболее просто определяется вектор тока статора (датчиками тока). Ниже будет доказана возможность определения потокосцепления ротора без применения операции интегрирования и поэтому момент асинхронного двигателя целесообразно определять по выражению
(li XVu),
где Zp - число пар полюсов:
И - ток статора;
$2 потокосцепление ротора;
Хт, Х2 - индуктивное сопротивление в контуре намагничивания и роторе соответственно.
Классический метод определения момента в книге (К.П. Ковач, И. Pay Переходные процессы в машинах переменного тока гос. энергоиздат, 1963 г., М) по методике, описанной в этой книге, разработано устройство для измерения момента (И.Рау и др. Прибор для измерения момента двигателя переменного тока, имеется перевод на русский язык № Ц-29558,1974 г.). В этом приборе магнитный поток определяется путем интегрирования, а момент двигателя определяется путем векторного умножения магнитного потока на соответствующие токи двигателя. Однако, это устройство имеет низкую стабильность во времени и невысокую точность при определении момента на низких частотах. Действительно магнитный поток Ф определяется по выражению:
& }(U-L,R)dt,
где R - активное сопротивление статора.
Для того, чтобы показания интегратора соответствовали значению магнитного потока, перед измерениями интегратор следу5 ет откалибровать режим Калибровка заключается в том, что интегратор переводят в режим сумматора и на вход по каналу напряжения и каналу тока подают напряжение, изменяя величину резистора по каналу
0 напряжения, добиваются того, чтобы напряжение на выходе сумматора приняло максимальное допустимое значение, затем, изменяя величину резистора по каналу тока, добиваются того, чтобы напряжение на вы5 ходе интегратора было равно нулю. Если теперь перевести сумматор в режим интегрирования и подать на вход сигналы, пропорциональные напряжения и току, то на выходе интегратора получим значение маг0 нитного потока.
Однако при таком методе определения величина магнитного потока имеет низкую стабильность во времени. Это связано с тем, что активное сопротивление двигателя
5 в зависимости от его режима может меняться в значительных пределах (1.2-1,8. раз), что приведет к нарушению балансировки. В установившемся режиме подынтегральная функция не будет равна нулю и начнется
0 процесс интегрирования, что приведет к низкой стабильности определения момента во времени.
Дополнительный источник ошибок появляется при частотном регулировании, ког5 да требуется определить момент при пониженных частотах. В этом случае составляющая IR становится соизмеримой и малейшие изменения сопротивления, вызванные как температурными изменени0 ями, так и нелинейностью магнитных цепей, приводит к ошибкам в определении момента, в случае нелинейных зависимостей между напряжением и током изменяются масштабные коэффициенты по каналам то5 ка и напряжения, калибровка прибора, выставление масштабных коэффициентов производится для одного уровня тока и напряжения, изменение режимов, при которых производилась калибровка, приводит к
0 появлению некоторого напряжения на входе интегратора, которое, накапливаясь во времени, приводит к ошибкам в определении момента.
Таким образом, описанный прибор не
5 может быть использован е качестве датчиков в системах регулирования, так как имеет низкую стабильность ао времени.
Известно устройство для измерения
электромагнитного момента электродвигателя (авт.св. № 883675) опубликованное в
бюл, №43,1981 г.)это устройство позволяет по току ротора и потокосцеплению воздушного зазора определить электромагнитный момент двигателя.
Недостаток этого устройства заключается в том. что потокосцепление определяется с помощью измерительной обмотки, расположенной в зоне обмотки статора, с последующим интегрированием сигнала. Это требует разборки и переделки стандартных двигателей, что нежелательно. Кроме того, операция интегрирования понижает точность вследствие ухода нулей интеграторов.
Известно устройство для измерения электромагнитного момента асинхронного двигателя (авт.св. ISfe 976313, опубликованное в бюл, № 43, 1982 г.). Это устройство наиболее близко к предлагаемому изобретению и поэтому оно принято в качестве прототипа. Это устройство по току статора и потокосцеплению статора позволяет определить электромагнитный момент двигателя. Устройство действительно имеет простую структурную схему, так как входными сигналами данного устройства являются ток статора и потокосцепление статора. Однако простота структуры этого устройства объясняется тем, что авторы не раскрыли блоки, которые определяют потокосцепление. Как известно, потокосцепление можно определить либо помещая в зазор электродвигателя датчик Холла, либо измерительную обмотку, или используя специальную схему измерения ЭДС (И.И. Эпштейн Автоматизированный электропривод переменного тока М., Энергоиздат, 1982 г.) с последующим интегрированием этого сигнала.
Если раскрыть эту структурную схему, вводя блоки по определению потокосцепле- ния, то устройство, принятое в качестве прототипа, будет иметь низкую точность вследствие наличия операции интегрирования.
Цель изобретения - повышение точности.
Поставленная цель достигается тем, что в устройство введены блок вычисления тока намагничивания, апериодическое звено и блок вычисления текущих составляющих тока в ортогональной системе координат, связанной с ротором, первый выход которого через апериодическое звено подключен к первому входу блока умножения, а второй - соответственно ко второму входу блока умножения, при этом датчики фазных напряжений подключены к первому входу блока вычисления тока намагничивания, выход которого подключен к первому входу блока
вычисления текущих составляющих тока в ортогональной системе координат, связанной с ротором, второй вход которого подключен к датчикам фазных токов и ко
второму входу блока вычисления тока намагничивания.
Названные существенные признаки отличают заявляемое решение от прототипа и поэтому оно соответствует критерию новизны. Существенные отличительные признаки в предлагаемом изобретении обеспечивают новые неожиданные свойства, позволяющие существенно повысить точность измерения,
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - векторная диаграмма асинхронного двигателя.
Устройство для определения электромагнитного момента асинхронного двигателя содержит датчики фазных напряжений 1, датчики фазных токов 2, блок умножения 3 и асинхронный двигатель 4. В устройство для определения электромагнитного момента асинхронного двигателя введены
блок вычисления тока намагничивания 5. апериодическое звено 6 и блок вычисления текущих составляющих тока в ортогональной системе координат, связанной с потоком 7. Причем, выход датчиков фазных
напряжений 1 соединен с первым входом блока вычисления тока намагничивания 5, выход которого подключен к первому входу блока вычисления текущих составляющих тока 7 в ортогональной системе координат,
связанной с ротором, а второй вход блока 7 подключен к датчикам фазных токов 2 и ко второму входу блока вычисления тока намагничивания 5. Первый выход блока определения составляющих тока 7 через
апериодическое звено б подключен к первому входу блока умножения 4, а второй выход блока 7 подключен ко второму входу блока умножения 4 непосредственно. Кроме того, блок определения составляющих тока 7
имеет третий управляющий выход, который соединен с третьим управляющим входом блока умножения 4. Все блоки, кроме блока определения тока намагничивания 5 и блока определения составляющих тока 7, стандартные блоки вычислительной техники. Блоки 5 и 7 описаны в авт.св. № 1372579, опубликованном в бюл. Мг 5, 1988.
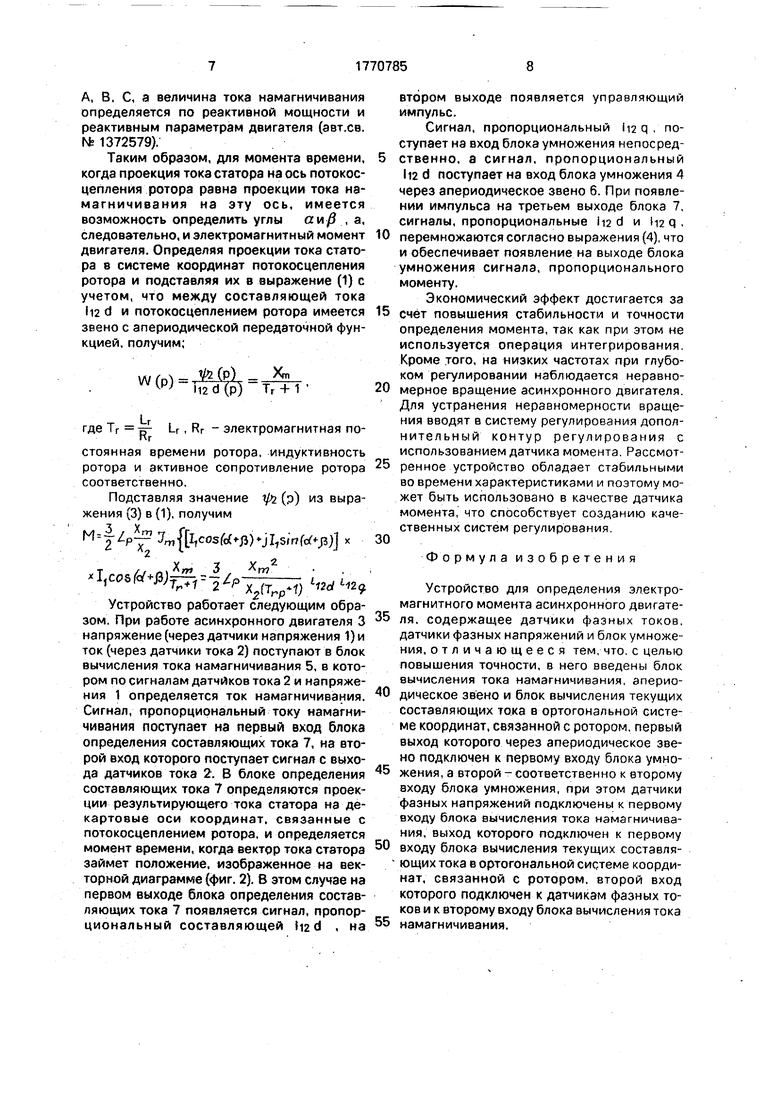
На фиг. 2 приведена векторная диаграмма асинхронного двигателя для момента
времени, когда проекция результирующего вектора тока на ось потокосцепления ротора чр2 равна проекции тока намагничивания на эту ось. Величина результирующего вектора тока определяется по величине токов
А, В, С, а величина тока намагничивания определяется по реактивной мощности и реактивным параметрам двигателя (авт.св. № 1372579).
Таким образом, для момента времени, когда проекция тока статора на ось потокос- цепления ротора равна проекции тока на- магничивания на эту ось, имеется возможность определить углы а и /3 , а. следовательно, и электромагнитный момент двигателя. Определяя проекции тока статора в системе координат потокосцепления ротора и подставляя их в выражение (1) с учетом, что между составляющей тока ha d и потокосцеплением ротора имеется звено с апериодической передаточной функцией, получим;
wf ,Vu(p) Хт. W (p) ii2d(p) Tr + 1
где Tr W Lr, Rr - электромагнитная noKr
стоянная времени ротора, индуктивность ротора и активное сопротивление ротора соответственно.
Подставляя значение ipz (p) из выражения (3) в(1), получим
If J-4{ Iic°s« J3)jI,smW.B)
.«vfafaJtsL i
Устройство работает следующим образом. При работе асинхронного двигателя 3 напряжение (через датчики напряжения 1)и ток (через датчики тока 2) поступают в блок вычисления тока намагничивания 5, в котором по сигналам датчиков тока 2 и напряжения 1 определяется ток намагничивания. Сигнал, пропорциональный току намагничивания поступает на первый вход блока определения составляющих тока 7, на второй вход которого поступает сигнал с выхода датчиков тока 2. В блоке определения составляющих тока 7 определяются проекции результирующего тока статора на декартовые оси координат, связанные с потокосцеплением ротора, и определяется момент времени, когда вектор тока статора займет положение, изображенное на векторной диаграмме (фиг. 2). В этом случае на первом выходе блока определения составляющих тока 7 появляется сигнал, пропорциональный составляющей had , на
втором выходе появляется управляющий импульс.
Сигнал, пропорциональный h2 q , поступает на вход блока умножения непосредственно, а сигнал, пропорциональный ii2 d поступает на вход блока умножения 4 через апериодическое звено б. При появлении импульса на третьем выходе блока 7, сигналы, пропорциональные h2 d и Н2 q .
перемножаются согласно выражения (4), что и обеспечивает появление на выходе блока умножения сигнала, пропорционального моменту.
Экономический эффект достигается за
счет повышения стабильности и точности определения момента, так как при этом не используется операция интегрирования. Кроме того, на низких частотах при глубоком регулировании наблюдается неравномерное вращение асинхронного двигателя. Для устранения неравномерности вращения вводят в систему регулирования допол- нительный контур регулирования с использованием датчика момента. Рассмотренное устройство обладает стабильными во времени характеристиками и поэтому может быть использовано в качестве датчика момента, что способствует созданию качественных систем регулирования
Формула изобретения
Устройство для определения электромагнитного момента асинхронного двигателя. содержащее датчики фазных токов, датчики фазных напряжений и блок умножения, отличающееся тем, что. с целью повышения точности, в него введены блок вычисления тока намагничивания, апериодическое звено и блок вычисления текущих составляющих тока в ортогональной системе координат, связанной с ротором, первый выход которого через апериодическое звено подключен к первому входу блока умножения, а второй - соответственно к второму входу блока умножения, при этом датчики фазных напряжений подключены к первому входу блока вычисления тока намагничивания, выход которого подключен к первому
входу блока вычисления текущих составля- ющих тока в ортогональной системе координат, связанной с ротором, второй вход которого подключен к датчикам фазных токов и к второму входу блока вычисления тока
намагничивания.
Фив. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АСИНХРОННОГО ДВИГАТЕЛЯ В РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ | 2000 |
|
RU2184417C1 |
Сущность изобретения: устройство содержит датчики фазных напряжений (1), датчики фазных токов (2), блок умножения (3), асинхронный двигатель (4), блок вычисления тока намагничивания (5), апериодическое звено (6). и блок вычисления текущих составляющих тока в ортогональной системе координат. (7). 1-5-7-6-3. 2-5-7-3, 2-7- 3. 2 ил. (Л С VI 8 3 01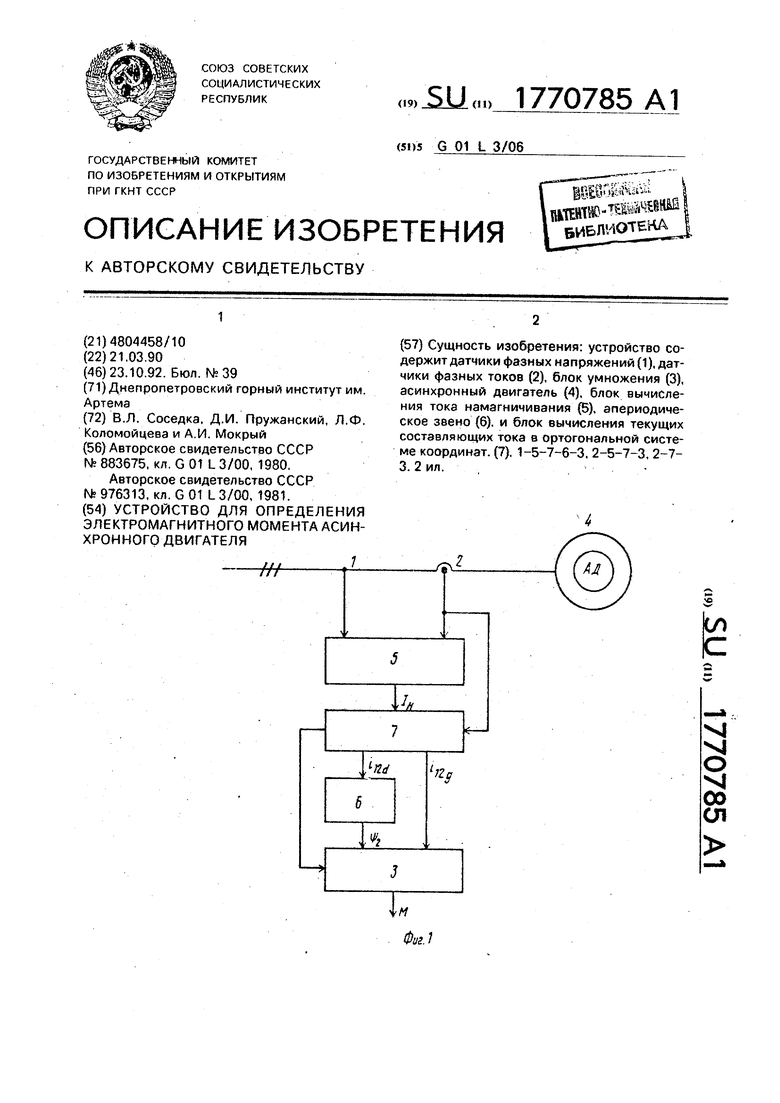
| Устройство для измерения электромагнитного момента электродвигателя | 1980 |
|
SU883675A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1981 |
|
SU976313A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
