Изобретение относится к авиационной технике и технике магнитных измерений, в частности к конструкции буксируемых устройств, и может быть использовано для поиска скопления магнитных тел, руд, полезных ископаемых и т.п. с помощью буксируемого магнитного зонда с заданной ориентацией его измерительной оси, а также при буксировке других приборов, где необходима ориентация их измерительных осей в вертикальном направлении.
Известно устройство для буксировки измерителя магнитного поля, содержащее летательный аппарат с размещенным на нем датчиком - измерителем магнитного поля, измерительная ось которого совпадает с вертикальной осью.
Недостатком устройства является возможность искажения характеристик магнитного поля, наводимого в колечной системе магнитного зонда при отражении сигнала от скопления полезных ископаемых, за счет влияния металлических частей летательного аппарата и низкая точность стабилизации измерительной оси магнитного зонда вдоль
вертикали за счет отклонения летательного аппарата от горизонтали в прямолинейном полете при действии на него возмущений.
Известно также устройство для буксировки измерителя магнитного поля, содержащее буксировщик, соединенный с несущим модулем через канат и подвесную систему в виде двух тяг, связанных с одной стороны с канатом и между собой, а с другой стороны - с несущим модулем, расположенных в поперечной плоскости несущего модуля, который состоит из оболочки и стабилизатора несущего модуля по углам курса и тангажа, а также имеющее грузовое основание измерителя магнитного поля, связанное с несущим модулем.
Данное устройство обеспечивает устранение искажений характеристик мггнитно- го поля, наводимого в колечной системе измерителя магнитного поля - магнитного зонда, при отражении сигнала от скопления магнитных тел за счет разнесения магнитного зонда и металлических частей летательного аппарата путем расположения магнитного зонда на буксируемом теле, коЁ
Ч
И ю
,со о
торое обладает меньшей массой по сравнению с летательным аппаратом. Однако происходит искажение характеристик магнитного поля в коленной системе металлическими частями буксируемого тела, так как буксируемое тело самолетной формы изготовлено из металла. Кроме того, устройство имеет низкую точность стабилизации измерительной оси измерителя магнитного поля вдоль вертикали в заданном диапазоне скоростей буксировки, так как центр масс буксируемого тела расположен для самолетной схемы на расстоянии 1/4 от кромки крыла и измерение скорости буксировки от начальной балансировки буксируемого тела с нулевым углом тангажа v 0 приводит к изменению балансировочного угла тангажа v в сторону его увеличения, что отклоняет измеритель магнитного поля, жестко закрепленный на буксируемом теле на тот же угол. Недостатком данного устройства является также то, что возмущения, например порыв ветра и т.п., действующие на буксируемое тело, вызывают его колебания, причем с той же амплитудой колеблется измеритель магнитного поля, жестко закрепленный в буксируемом теле.
Цель изобретения - повышение точности стабилизации измерительной оси вдоль вертикали в широком диапазоне скоростей буксировки и уменьшение амплитуды колебаний измерителя магнитного поля.
Поставленная цель достигается тем, что устройство для буксировки измерителя магнитного поля, содержащее буксировщик, соединенный с несущим модулем через канат и подвесную систему, выполненную в виде двух тяг, связанных с одной стороны с канатом и между собой, а с другой стороны - с несущим модулем, расположенных в поперечной плоскости несущего модуля, который состоит из оболочки и стабилизатора по углам курса и тангажа, а также имеющее грузовое основание измерителя магнитного поля, связанное с несущим модулем, согласно изобретению, содержит каркас, на котором расположено грузовое основание измерителя магнитного поля, при этом каркас размещен внутри несущего модуля и соединен с верхней внутренней частью его оболочки посредством шарнирного узла.
Кроме того, стабилизатор несущего модуля по углам курса и тангажа выполнен в виде парашюта, соединенного с несущим модулем с помощью дополнительного троса.
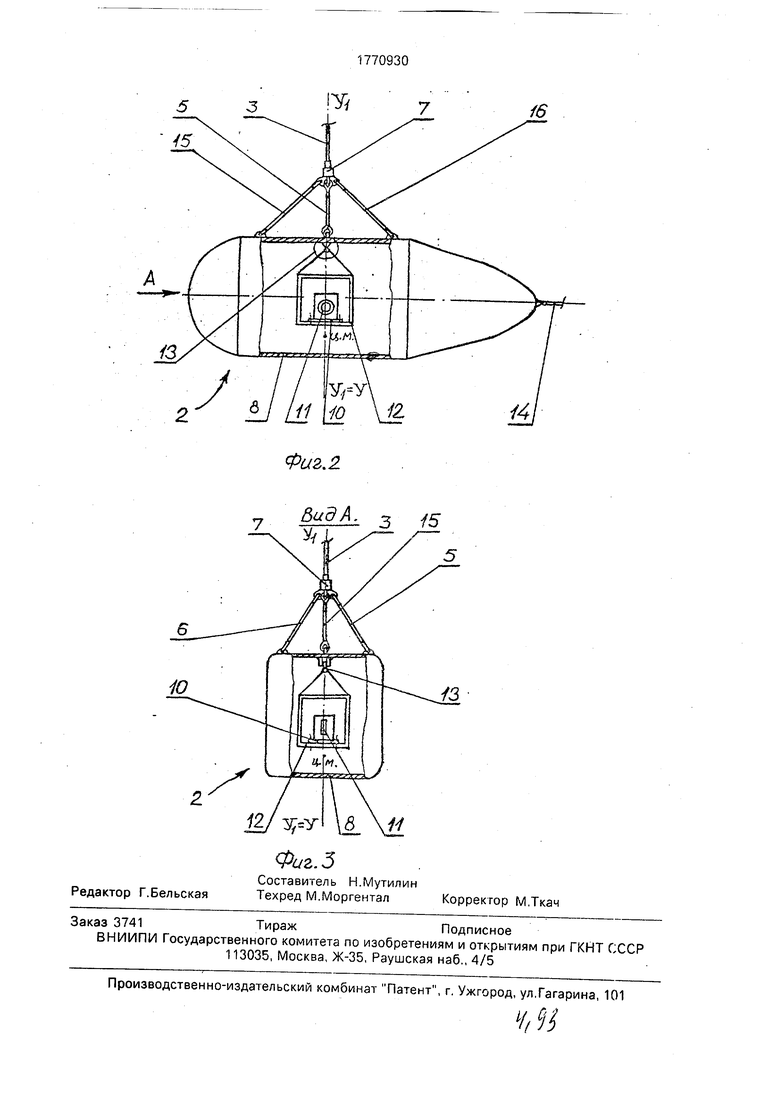
На фиг. 1 показано предлагаемое устройство; на фиг. 2 - конструкция несущего модуля; на фиг. 3 - вид А на фиг. 2.
Устройство содержит буксировщик 1, например вертолет, соединенный с несущим модулем 2 через канат 3 и подвесную систему 4 в виде двух тяг 5 и 6, связанных с
одной стороны с канатом 3 через вертлюг 7 и между собой, а с другой стороны - с несущим модулем 2, расположенных в поперечной плоскости несущего модуля 2. Несущий модуль 2 состоит из оболочки 8 и стабилизатора 9 по углам курса и тангажа. Устройство содержит также грузовое соединение 10 измерителя магнитного поля 11, например магнитный зонд.
Устройство снабжено каркасом 12, на
котором расположено грузовое основание 10 измерителя магнитного поля 11. Каркас 12 размещен внутри несущего модуля 2 и соединен с верхней внутренней частью его оболочки 8 посредством шарнирного
узла 13.
Стабилизатор 9 несущего модуля по углам курся и тангажа выполнен в виде парашюта, соединенного с несущим модулем 2 с помощью дополнительного троса 14 из диэлектрического материала, например кевлара, капрона и т.п.
Для обеспечения устойчивого подъема и спуска буксируемой системы в подвесной системе 4 предусмотрены дополнительные
ветви 15 и 16, расположенные в продольной плоскости несущего модуля 2 и с одной стороны связанные между собой и канатом 3, а с другой закрепленные на внешней поверхности несущего модуля 2.
Оболочка 8 несущего модуля 2, каркас 12, вертлюг 7, шарнирный узел 13 выполнены из диэлектрического материала, например текстолита и т.п. Канат 3 выполнен из диэлектрика, например кевлара, капрона.
Несущий модуль 2 выполнен в виде тела удобообтекаемой формы.
Устройство работает следующим образом.
При перемещении измерителя магнитного поля 11 вдоль поверхности земли на заданной скорости буксировщиком 1 несущий модуль 2 располагается на заданном расстоянии от него с помощью буксирного каната 3 и подвесной системы 4 и занимает
равновесное положение под действием направленных на него аэродинамических, массовых сил и сил натяжения каната 3 v дополнительного троса 14. При этом благодаря шарнирному креплению каркаса 12, на
котором закреплена, например, приемная колечная система магнитного зонда 11, измерительная ось колечной системы у располагается вдоль вертикали. При изменении скорости буксировки измерителя магнитного поля несущий модуль 2 отклоняется в продольной плоскости по углу тангажа из-за изменения положения вектора суммарного момента от аэродинамических, весовых сил и сил натяжения каната 3 и дополнительного троса 14. Однако за счет шарнирного узла 13 измерительная ось магнитного зонда 11 под действием силы тяжести каркаса 12 с зондом 11 остается направленной вдоль вертикали. Кроме того, при действии возмущений на несущий модуль 2, например порыва ветра W, он начинает колебаться, но эти возмущения не действуют на магнитный зонд 11, размещенный внутри несущего модуля 2, в результате чего уменьшается амплитуда его колебаний.
Формула изобретения 1. Устройство для буксировки измерителя магнитного поля, содержащее буксировщик, связанный с несущим модулем через канат и подвесную систему, выполненную в виде двух тяг, связанных с одной стороны с канатом и между собой, а с другой стороны
связанных с несущим модулем, расположенных в поперечной плоскости несущего модуля, который состоит из оболочки и стабилизатора по углам курса и тангажа, а
также содержащее грузовое основание измерителя магнитного поля, связанное с несущим модулем, отличающееся тем, что, с целью повышения точности стабилизации измерительной оси вдоль вертикали в
широком диапазоне скоростей буксировки и уменьшения амплитуды колебаний измерителя магнитного поля, оно содержит каркас, на котором помещено грузовое основание измерителя магнитного поля, при
этом каркас помещен внутри несущего модуля и соединен с верхней внутренней частью его оболочки посредством шарнирного узла.
2. Устройство поп.1, отличающеес я тем, что стабилизатор несущего модуля по углам курса и тангажа выполнен в виде парашюта, соединенного с несущим модулем с помощью дополнительного троса,


| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ | 2005 |
|
RU2358294C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Комплекс ориентации диполей буксируемой антенной системы | 1990 |
|
SU1755522A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| УСТРОЙСТВО И СПОСОБ АЭРОФИЗИЧЕСКОЙ РАЗВЕДКИ | 2014 |
|
RU2557354C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |
Использование: в авиационной технике и технике магнитных измерений, в гражданской авиации для поиска полезных ископаемых и т.п. Устройство содержит буксировщик, соединительный узел, состоящий из каната и подвесной системы, несущий модуль, состоящий из оболочки и -стабилизатора по углам курса и тангажа, грузовое основание измерителя магнитной: поля, например магнитный зонд, и каркас, связанный шарнирным узлом с корпусом магнитного зонда. 1 з.п. ф-лы, 3 ил
Фиг. 1
4
Фиг. 2
v вид А-- 3 15 7 Ъ
& Фиг.З
16
| Патент США № 3614600, кл | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
| Патент США № 3872375, кл | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
