В известных электроиневматических регуляторах закон регулирования формируется с помощью обратной связи.
Предложенный регулятор отличается от известных тем, что, с целью линеаризации закона движения регулятора, распределительная система содержит мембраииый блок, образующий камеры положительной и отрицательной обратной связи, соединенные неиосредственио с камерами пневмоэлектрического устройства обратной связи и через переменные дроссели со средней полостью распределительной системы н с выходным каналом регулятора; мембранный блок соединен с двумя якорями электромагнитов.
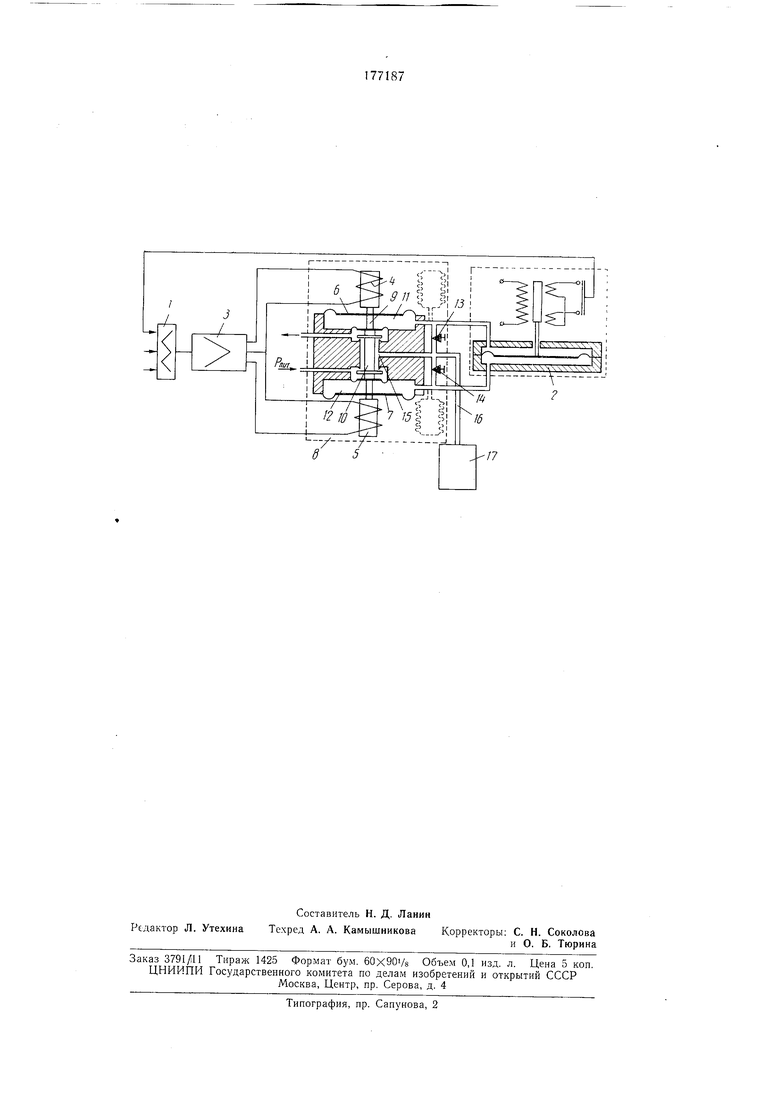
Схема регулятора приведена на чертеже.
Входные сигналы от датчиков поступают к сумматору /, к которому подается также сигнал отрицательной обратной связи от нневмоэлектрического преобразователя 2.
Выходной сигнал сумматора подается к усилителю 3, нагрузкой которого являются два дифференциально включенных электромагнита 4 и 5. Якори электрогмагнитов соединены с мембранами 6 и 7 распределительной системы 8. Мембраны щтоком 9 соедннены с клапаном 10. Камеры положительной обратной связи // и отрицательной обратной связи 12 соединеиы с камерами устройства 2 п через переменные дроссели /5 н 14 - со средней полостью 15 раснределителыюй системы и с выходным каналом /6. Выходной канал соединен с нсполинтельным механизмом 17.
Предмет изобретения
Электропневматнческий регулятор, содержащий датчики с электрическим выходом, сумматор, полупроводниковый усилитель, нагрузкой которого являются два диффереициальио включеиные электромагнита, пиевмоэлектрическое устройство обратной связи, распределительную снстему с двумя клапанами и два переменных дросселя, отличающийся тем, что, с целью лннеарнзацни уравнения движення регулятора, распределительная система содержит мембраииый блок, образуюИ1ИЙ камеры положительпой и отрицательиой обратной связи, соединенные непосредственно с камерами пневмоэлектрнческого устройства обратной связи и через переменные дроссели со средней полостью распределительной системы и с выходным каналом регулятора, а мембраииый блок соединен с двумя якорями электромагннтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ КВАЗИОПТИМАЛЬНЫЙ РЕГУЛЯТОР | 1970 |
|
SU268768A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1971 |
|
SU308234A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352975C1 |
| ГИДРАВЛИЧЕСКИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 1970 |
|
SU277426A1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР | 2021 |
|
RU2768105C1 |
| ДОЗИРУЮЩАЯ УСТАНОВКА | 1972 |
|
SU348367A1 |
| ИНДИКАТОР ОТКАЗА ПНЕВМАТИЧЕСКОГО | 1971 |
|
SU297979A1 |
| Пневматическое управляющее устройство | 1975 |
|
SU567162A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |