Изобретение относится к машиностроению, а именно к элементам конструкций ма нипуляторов, используемых для автоматизации различных производственных процессов.
Цель изобретения - упрощение конструкции.
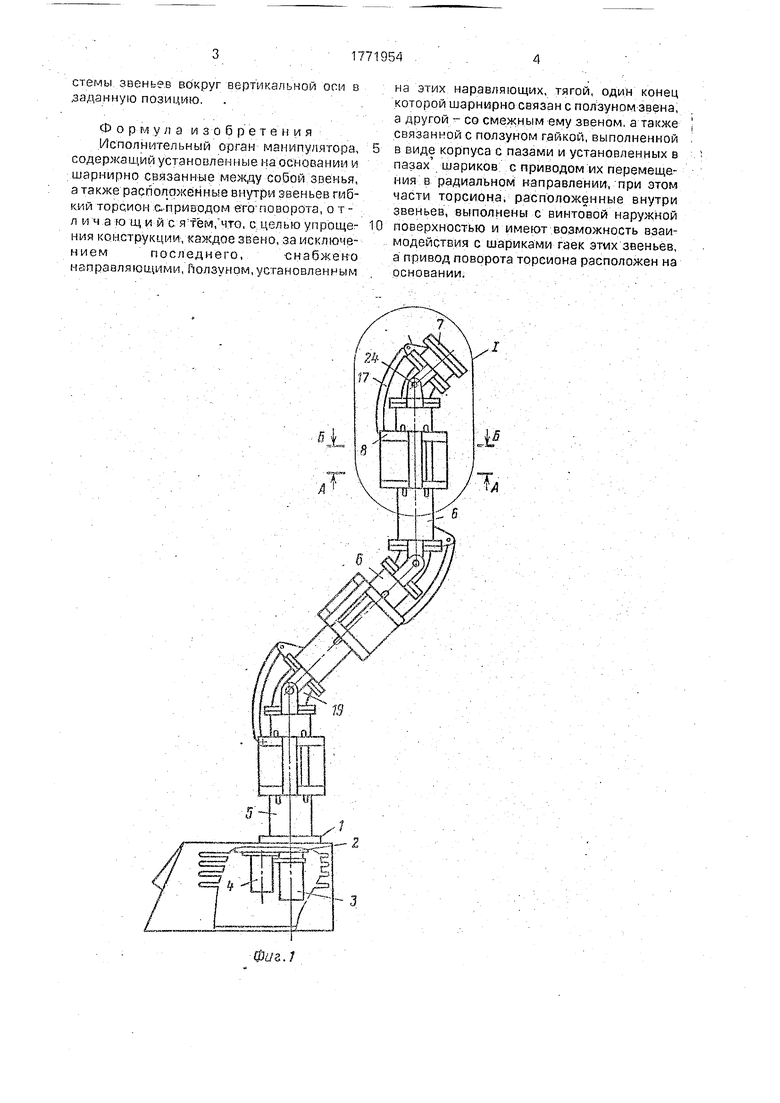
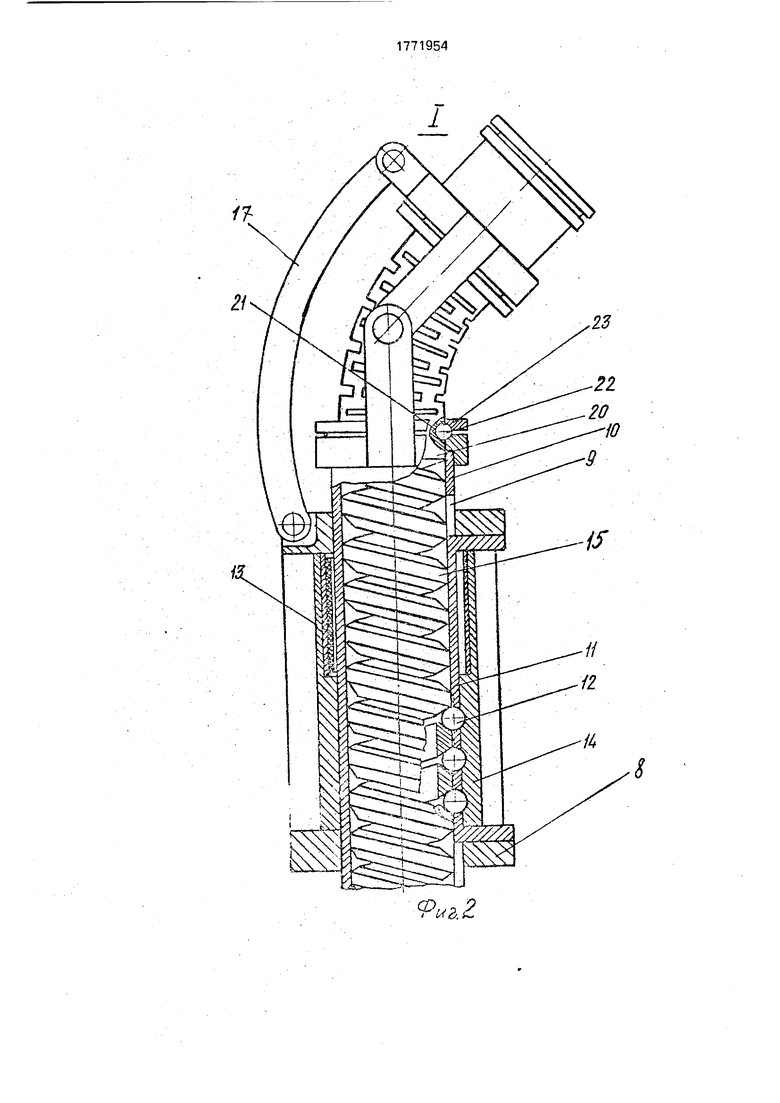
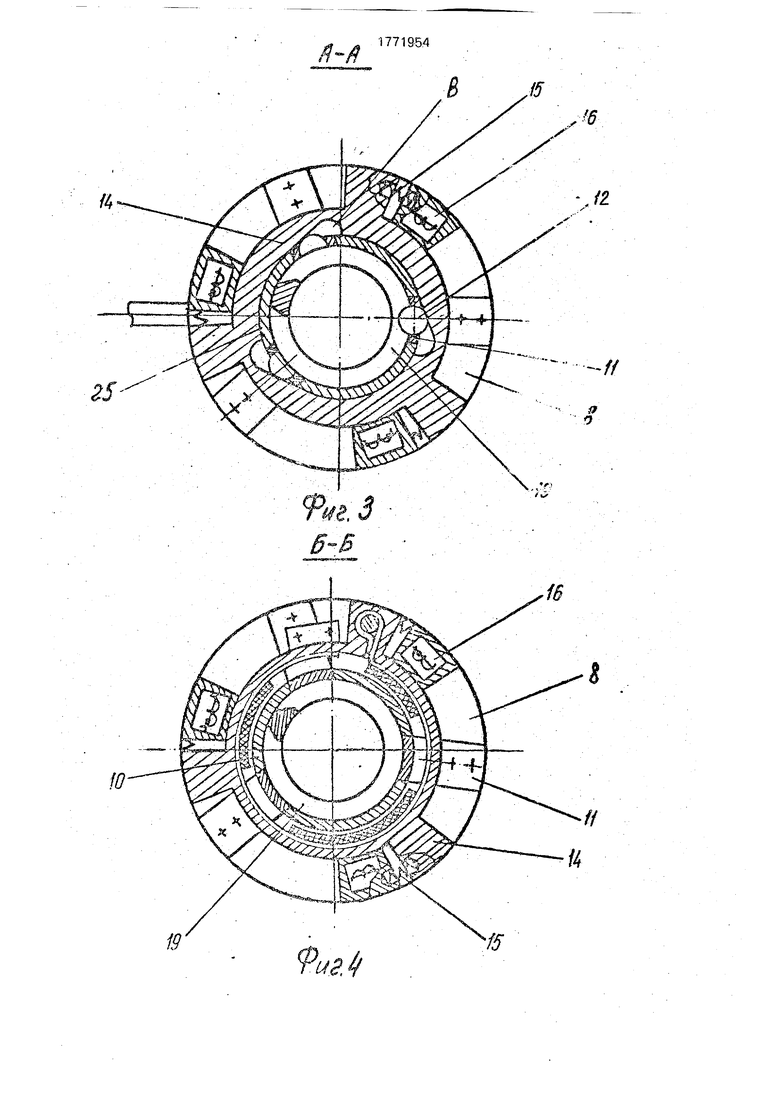
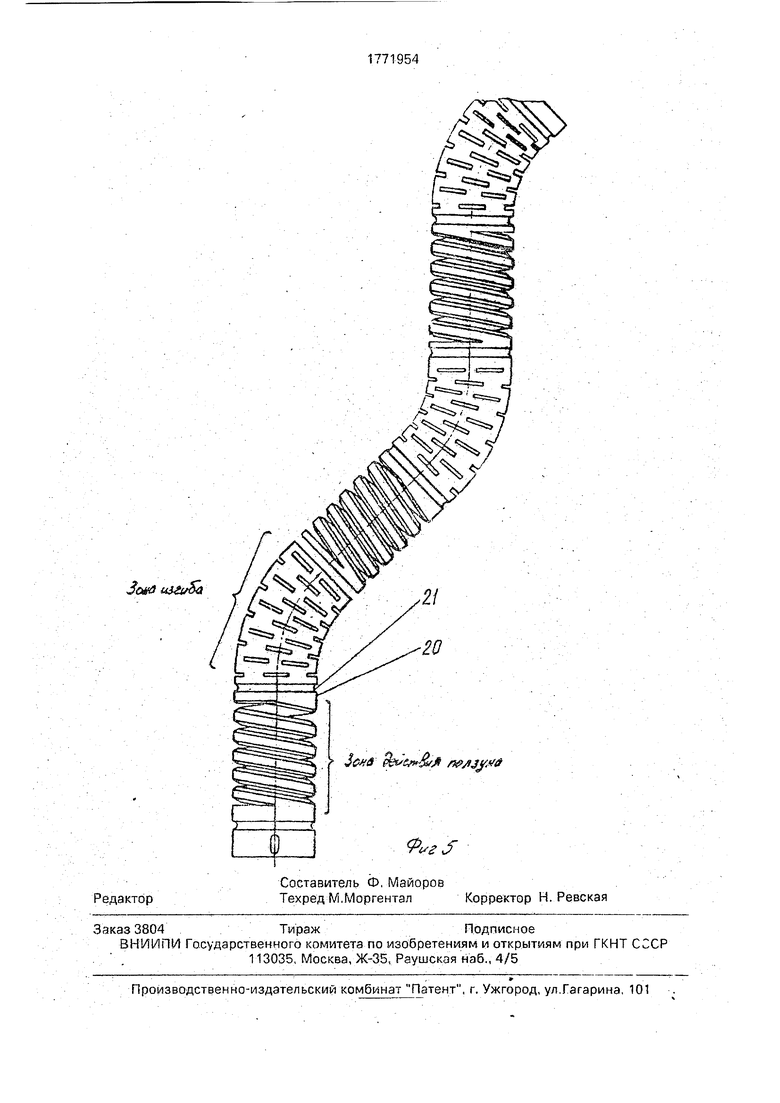
На фиг, 1 изображен исполнительный орган, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 - торси- он.
Исполнительный орган манипулятора содержит основание 1 с фланцем 2, к которому крепятся приводные двигатели 3 и 4, щарнирно связанные звенья: начальное 5, промежуточное 6 и конечное 7. На каждом звене, кроме конечного, установлены ползуны 8, на которых закреплены гайки, включающие расположен ные под углом 120° между собой и входящие в пазы 8 корпуса 10, обоймы 11с шариками 12, а также приводы 13 перемещения шариков 12 в радиальном направлении, включающие втулку 14, пружины 15, электромагниты 16. Ползуны 8 соединены тягами 17 с шарнирами 18 на фланцах трубчатых корпусов последующих звеньев. Внутри всехзвеньев проходит комбинированный торсион 19. В зонах изгиба торсион 19 выполнен в виде прорезной пружины в начале и в конце участка изгиба имеются места усиления 20 с лунками 21, шарики 22, фиксируемые фланцами 23. В зонах действия ползунов торсион выполнен в винтовой поверхности. Позицией 24 обозначен шарнир, соединяющий звенья.
Исполнительный орган манипулятора работает следующим обрасом. При вращении двигателем 3 торсиона 19 зо включенном состоянии, шарики 12 вводят в зацепление с винтовой поверхностью торсиона 19, прижатые втулкой 14, повернувшейся по часовой стрелке вокруг осил в результате воздействия включенного электромагнита. Ползун при этом получает поступательное движение, воздействуя гягой 17 на корпус последующего звена, заставляя его поворачиваться в шарнире 24 нэ заданный угол.
В выключенном состоянии шаоики 12 имеют возможность уходить в почости Е (см. фиг. 3), не препятствуя вращению торсиона 19. Втулка 14 под действием пружин 15 поворачивается, фиксируя достигнутый угол поворота. С помощью реверсивного двигателя 4 производится поворот всей сисл
N4
XI
О СЛ
стемы звеньев вокруг вертикальной оси в заданную позицию.
Формула изобретения
Исполнительный орган манипулятора, содержащий установленные па основании и шарнирно связанные между собой звенья, а также расположенные внутри звеньев гибкий торсион а приводом его поворота, отличающийся тем, что, с целью упрощения KOHCI рукции, каждое звено, за исключе- ниемпоследнего,-снабжено
направляющими, Ползуном, установленным
0
на этих наравляющих, тягой, один конец которой шарнирно связан с ползуном звена, а другой - со смежным ему звеном, а также связанной с ползуном гайкой, выполненной в виде корпуса с пазами и установленных в пазах шариков с приводом их перемещения в радиальном направлении, при этом части торсиона, расположенные внутри звеньев, выполнены с винтовой наружной поверхностью и имеют возможность взаимодействия с шариками гаек этих звеньев, а привод поворота торсиона расположен на основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832619A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ВЕНТИЛЯЦИИ | 2007 |
|
RU2353860C1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| ТРАНСПОРТНЫЙ УНИВЕРСАЛЬНЫЙ ВАРИАТОР АВТОМАТИЧЕСКОГО ДЕЙСТВИЯ "ТРАНСУНВАРТОР-АВТОМАТ" | 1992 |
|
RU2047023C1 |
| Исполнительный орган манипулятора | 1980 |
|
SU1097187A3 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
Сущность изобретения: при вращении двигателем торсиона, проходящего внутри всех звеньев, происходит поступательное перемещение тех ползунов указанных звеньев, на которые поступает управляющий сигнал, обеспечивающий зацепление винтовой поверхности торсиона с шариками, расположенными в этих звеньях. При этом тягой поворачивается на заданный угол корпус последующего звена. С помощью двигателя производится поворот всех звеньев одновременно вокруг вертикальной оси,5 ил.
Фи&.1
1%
21
4ST
is:
On
Oo
3o#a u$&f&at
3&(Л (kvZ& &fj f&,/lty4&
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
