(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1990 |
|
SU1771954A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU766856A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1202855A1 |
| Привод исполнительного органа манипулятора | 1984 |
|
SU1184668A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| СИЛОВОЙ БЛОК САМОХОДНОГО ПАРОМА И УСТРОЙСТВО ДЛЯ ЕГО КРЕПЛЕНИЯ | 2009 |
|
RU2392172C1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
I;
Изобретение относится к машиностроению, в частности к манипуляторам для механизации подъемно-транспортных и других операций.
По основному авт. св. № 766856 известен исполнительный орган манипулятора, содержащий основание, звеИья, шарнирно связанные между собой при помощи приводов, и захват. Звенья исполнительного органа: выполнены в виде трубчатых элементов с торцами, скошенными в противоположное сто РОНЫ относительно их оси, при этом оси приводов перпендикулярны торцам звеньевГ. Звенья могут быть выполнены в виде круго-вых или эллиптических цилиндров, в виде усеченных конусов (круговых или эллиптических). Торцы смежных трубчатых элементов имеют одинаковые поверхности, а приводы выполнены в виде моментных двигателей. При взаимном повороте звенья описывают конические поверхиости с вершиной конуса в точке пересечения смежных звеньев, причем половина угла конуса равна углу скосэ торца звена 1.
Такая конструкция обеспечивает взаимные перемеш:ения звеньев в широких пределах, определяемых углом скосов торцев
звеньев, а также их длиной и числом. Однако расположение приводных двигателей непосредственно внутри звеньев исполнительного органа в ряде случаев приводит к сужению технологических возможностей. Это связано с увеличением размеров звеньев в направлениях, перпендикулярных оси звена. Кроме того, возникают неудобства, связанные со скручиванием проводки управления при взаимном повороте звеньев. Расположение приводных двигателей (в
д частности электрических и гидравлических) непосредственно в звеньях в ряде случаев делает невозможным применение таких манипуляторов в средах с повышенной температурой (например выемка отливок из кокиля, обслуживание прессов горячей
5 штамповки) ввиду опасности разрушения резиновых шлангов гидросистем или пластмассовой изоляции электропроводки.
Цель изобретения - расширение технологических возможностей исполнительного органа манипулятора.
20 Для достижения поставленной цели он снабжен выполненными в виде гибких элементов трубчатыми торсионами, расположенными внутри звеньев соосно друг другу.
причем один конец каждого торсиона соединен со своим звеном, второй его конец кинематически связан с приводом этого звена, а приводы расположены на основании исполнительного органа.
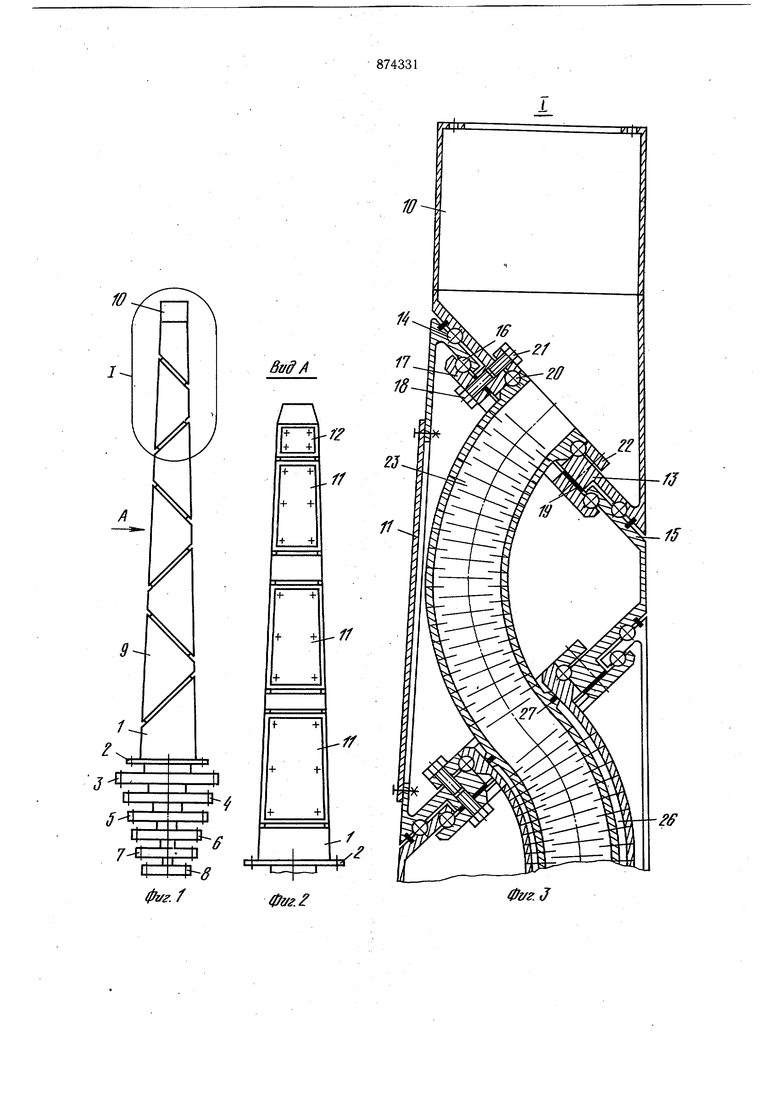
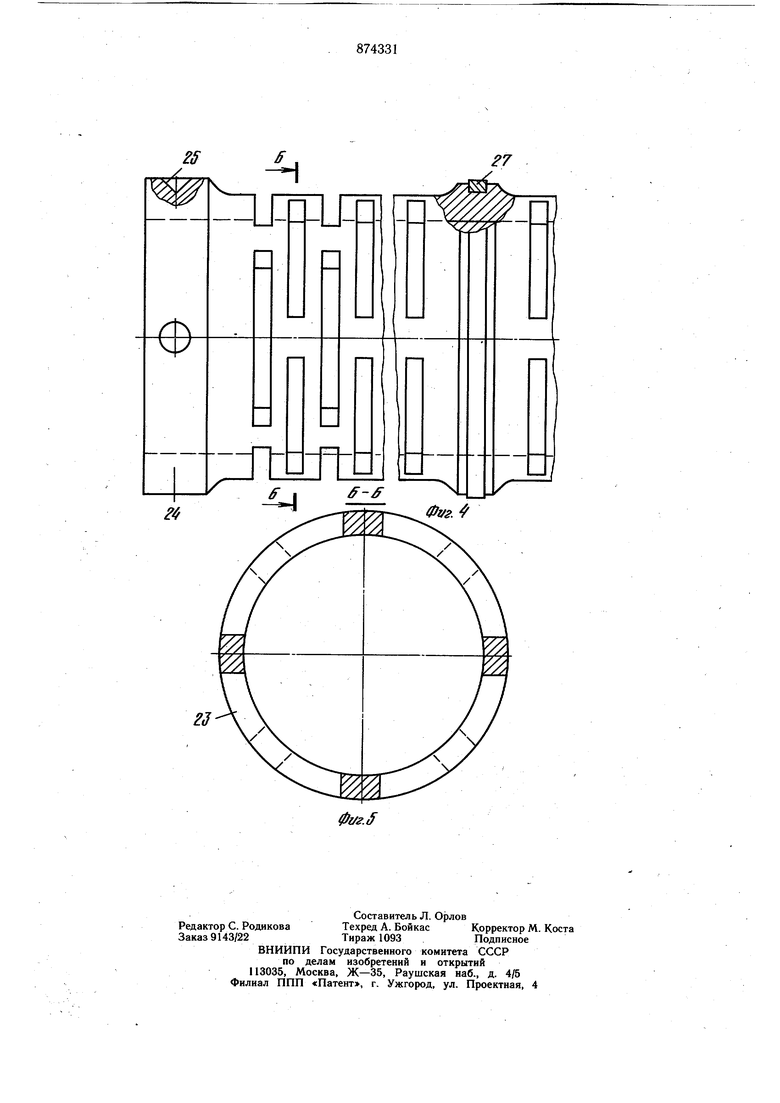
На фиг. 1 схематично изображен исполнительный орган, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - трубчатый торсион, общий вид; на фиг. 5 - сечение. Б-Б на фиг. 4.
Исполнительный орган манипулятора содержит основание 1 с фланцем 2, к которому крепятся приводные двигатели (на чертеже не показаны). Выходные валы каждого двигателя снабжены щестернями, находящимися в зацеплении с шестернями 3- 8 (фиг. 1), соединенными последовательно с промежуточными звеньями 9 и с концевым звеном 10. В данном случае число промежуточных звеньев равно пяти, следовательно, число степеней свободы равно щести.
Для облегчения монтажных работ в звеньях предусмотрены люки 11 и 12.
Каждое звено (фиг. 3) имеет фланец 13, скошенный по отношению к оси звена (в данном случае угол скоса равен 45°), в котором выполнена канавка с расположенными Б ней шариками 14. Фланец смежного звена 15 имеет аналогичную канавку с шариками 16. Группы шариков 14 и 16 стянуты фланцем 17 и болтами 18, а необходимый зазор регулируется комплектом прокладок 19. Применение шариковых опор значительно снижает потери на трение, а шарики из жаропрочных сталей могут работать при повышенных температурах. Во фланце 13 с внутренней стороны выполнены сферические лунки, в которые расположены шарики 20. Эти шарики предназначены для передачи крутящего момента при повороте звена 10 и дополнительно нагружены усилием затяжки от болтов 21, передаваемым через фланец 22, в котором выполнены аналогичные сферические лунки.
Крутящий момент, необходимый для поворота звена 10, от приводного двигателя (на чертеже не показан) и шестерни 8 (фиг. 1) передается звену через трубчатый торсион 23.
В зонах изгиба торсион 23 выполнен в виде прорезной пружины (фиг. 4 и 5), причем на его концах имеются фланцы 24 с лунками 25 под шарики 20, фиксирующие соединение торсиона 23 с фланцем 13. В месте перегиба торсиона (что соответствует месту подсоединения смежного торсиона 26)
выполнено усилие с канавкой, в которой установлено кольцо 27 из антифрикционного материала (бронза) с целью уменьшения трения при взаимном повороте торсионов 23 и 26.
Аналогичным образом подсоединяются все последующие торсионы, образующие соосную гибкую систему.
Прорезные пружины могут быть заменены соосно расположенными сильфонами или другими изделиями, жесткость которых на изгиб значительно ниже жесткости на кручение.
Исполнительный орган манипулятора работает следующим образом.
При вращении шестерни 8 (фиг. 1) приводным двигателем (на чертеже не показан) вращение передается торсиону 23, связанному с этой шестерней, причем ввиду наличия прорезей (фиг. 4 и 5) торсион работает как прорезная пружина, обеспечивая необходимую гибкость при достаточно высокой крутильной жесткости.
Величину изгибной и крутильной жесткостей можно изменять в достаточно широких пределах путем изменения количества прорезей, их ширины и расстояния между 5 прорезями.
Вращение передается концевому звену 10 через шарики 20 и фланец 13. При вращении звена 10 оно описывает в пространстве конус с полууглом при вершине, расположенной в точке пересечения смежных звеньев, равным углу скоса звена 10 (в данном случае 45°).
Аналогичным образом происходит поворот всех остальных звеньев.
Формула изобретения
Исполнительный орган манипулятора по авт. св. № 766856, отличающийся тем, что, с целью расширения технологических воз4Q можностей, он снабжен выполненными в виде гибких элементов трубчатыми торсионами, расположенными внутри звеньев соосно друг другу, причем один конец каждого торсиона соединен со звеном, второй его конец кинематически связан с приводом этого
45 звена, а приводы расположены на основании исполнительного органа.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР °№ 766856, кл. В 25 J 11/00, 1978. фг/г. фуг. 2 0i/z.J
