Изобретение относится к грузозахватному устройству, используемому с подъемными механизмами для захвата, подъема, опускания и перемещения крупногабаритных изделий.
Из уровня техники известна грузовая траверса, содержащая раму, включающую продольные и поперечные балки, корпус, в котором установлено средство для связи с органом грузоподъемного средства, и грузозахватные устройства, шарнирно закрепленные на раме, рама подвижно соединена с корпусом с помощью гибких тяг, которые шарнирно закреплены на раме и корпусе, грузозахватные устройства выполнены сменными и закреплены соответственно на крайних поперечных балках рамы с помощью переустанавливаемых штырей, причем грузовая траверса снабжена устройством фиксации в транспортировочном положении взаимного положения корпуса и рамы (см. Патент RU 2214961, опубликован 27.10.2003).
Также из уровня техники известна траверса спуско-подъемного устройства, содержащая раму, автоматические захваты, амортизаторы и стропы, соединяющие автоматические захваты с амортизаторами, рама выполнена в виде двух подкрепленных поперечными ребрами жесткости параллельных балок, по торцам рамы установлены штоковые устройства, на балках расположены подвижные по длине рамы муфты с ручками-стопорами, амортизаторы вертикально встроены в подвижные муфты, имеют соосный с автоматическими захватами канал и канифас-блок над ним для заведения канатов-проводников за штоковые устройства поднимаемого объекта (см. Патент RU 2616452, опубликован 17.04.2017).
Недостатком таких известных траверс является отсутствие возможности автоматического позиционирования рабочих органов траверсы, для соединения траверсы с перемещаемым изделием необходимо затрачивать большое количество времени и применять ручной труд, сложность процесса точной установки изделия в необходимое проектное положение.
Наиболее близким к предложенному решению является траверса, содержащая продольную балку с подвесом серьги, двумя поперечными балками с размещенными на них каретками с крюковыми подвесками, продольная балка снабжена стойками сверху с установленными на них ходовыми винтами с возможностью перемещения подвеса серьги, стойками снизу с установленными на них ходовыми винтами с возможностью перемещения поперечных балок, причем в средней части подвеса серьги и поперечных балок размещены гайки, при этом поперечные балки также снабжены стойками с установленными на них ходовыми винтами с возможностью перемещения на них кареток с крюковыми подвесками, а в средней части кареток размещены гайки (см. патент RU 166835, опубликован 10.12.2016).
Недостатком наиболее близкого решения является отсутствие возможности автоматического позиционирования траверсы относительно захватываемого изделия, а также автоматического захвата изделий, при использовании траверсы необходимо использовать ручной труд для соединения грузозахватных устройств с изделием, отсутствие возможности поворота траверсы с захваченным изделием, что усложняет процесс точной установки изделия в необходимое проектное положение.
Технической проблемой, решаемой изобретением, является создание такой траверсы, с помощью которой возможен максимально точный и быстрый захват крупногабаритных изделий и позиционирование их в проектное положение.
Техническим результатом изобретения является обеспечение возможности автоматического захвата и позиционирования крупногабаритных изделий любых размеров, повышение точности установки крупногабаритных изделий в проектное положение, исключение необходимости использования ручного труда при захвате изделий, повышение скорости возведения зданий и сооружений.
Технический результат изобретения достигается благодаря тому, что траверса содержит по меньшей мере одну продольную балку, подвес с приводом, соединенный с по меньшей мере одной продольной балкой с возможностью перемещения вдоль нее, поперечные балки с приводами, соединенные по меньшей мере с одной продольной балкой с возможностью перемещения вдоль нее, и соединенные с каждой поперечной балкой с возможностью перемещения вдоль нее грузозахватные устройства с приводами, по меньшей мере одна продольная балка соединена с подвесом с помощью поворотного механизма с возможностью вращения относительно подвеса, при этом траверса снабжена блоком управления, связанным с приводами подвеса, поперечных балок, грузозахватных устройств и поворотного механизма с возможностью автоматического позиционирования.
Кроме того, траверса может быть снабжена по меньшей мере одним измерительным датчиком расстояния, связанным с блоком управления, а также по меньшей мере одним весовым датчиком, связанным с блоком управления.
Кроме того, траверса может быть снабжена по меньшей мере одной видеокамерой.
Также траверса может быть снабжена по меньшей мере одним считывателем меток, связанным с блоком управления.
Кроме того, траверса может иметь систему выравнивания, связанную с блоком управления.
Кроме того, траверса может иметь систему освещения.
Кроме того, по меньшей мере одна поперечная балка может быть соединена с по меньшей мере одной продольной балкой с помощью другого поворотного механизма с возможностью вращения относительно по меньшей мере одной продольной балки, при этом привод другого поворотного механизма связан с блоком управления.
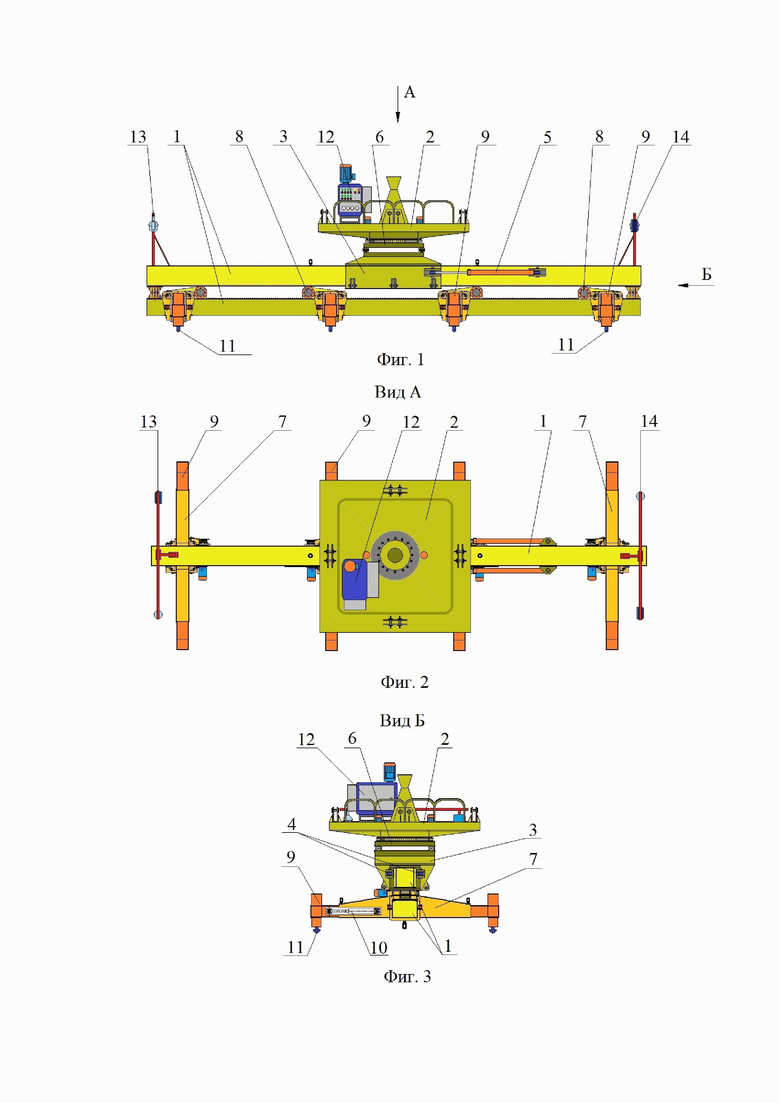
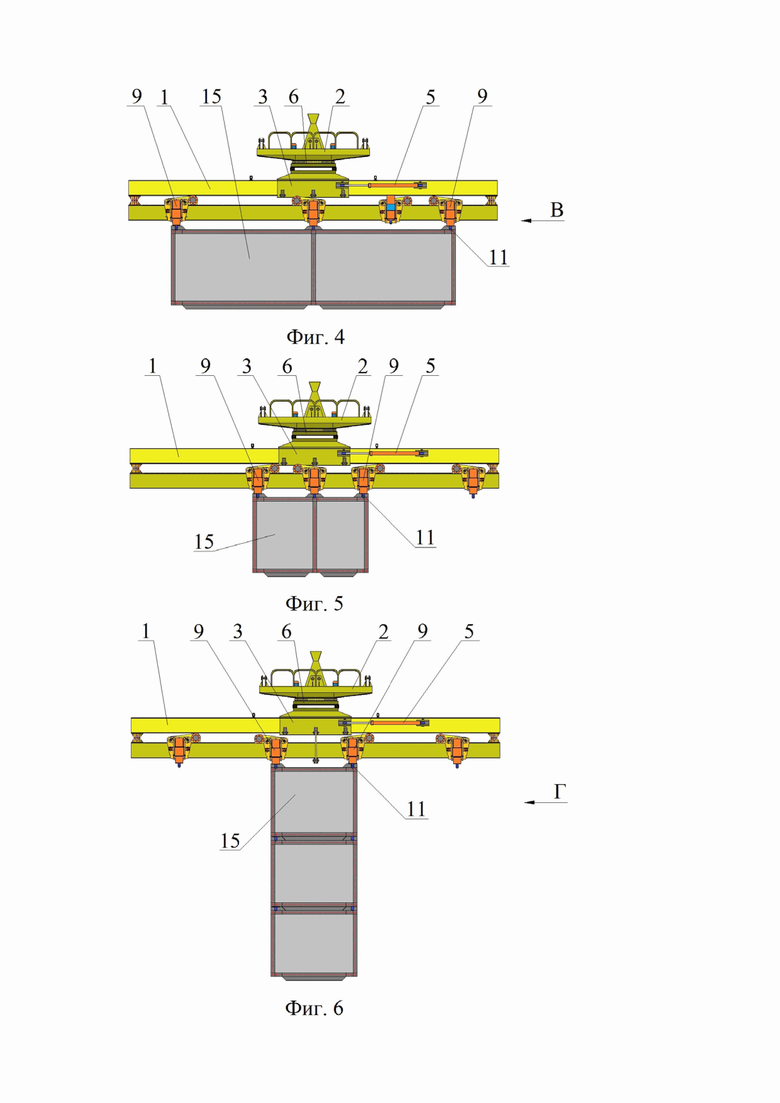
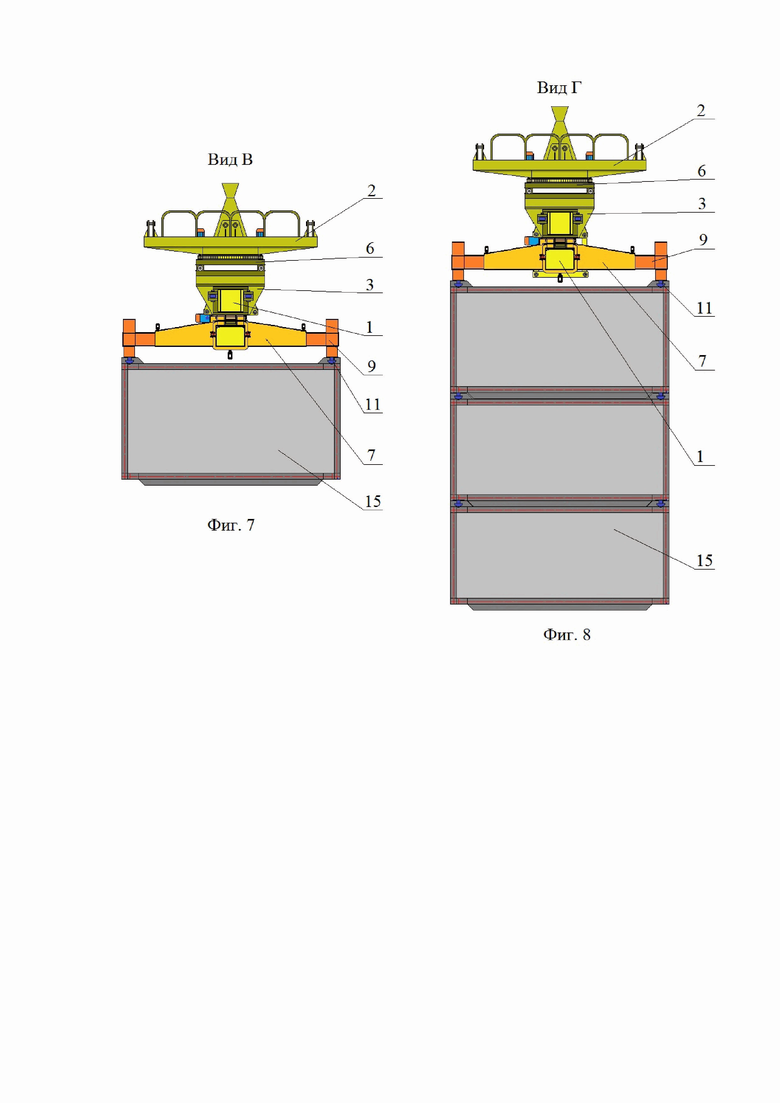
Изобретение поясняется чертежами, где на фиг. 1 показана предложенная траверса; на фиг. 2 показан вид А на фиг. 1; на фиг. 3 показан вид Б на фиг. 1; на фиг. 4 – 6 показаны примеры захвата негабаритных изделий с помощью предложенной траверсы; на фиг. 7 показа вид В на фиг. 4; на фиг. 8 показан вид Г на фиг. 6.
Предложенная автоматическая самопозиционирующаяся полноповоротная траверса используется, преимущественно, при строительстве зданий, строений и сооружений, в частности при модульном (объемно-блочном) домостроении. Предложенная траверса используется совместно с подъемными устройствами (кранами любого типа) и предназначена для захвата, подъема, опускания и перемещения крупногабаритных изделий 15 (преимущественно, негабаритных готовых объемных модулей 15).
Автоматическая траверса содержит продольную балку 1. Причем количество продольных балок 1 может быть от одной и более. В случае наличия более одной продольной балки 1, они могут быть соединены друг с другом поперечными усиливающими перемычками (не показаны).
С продольной балкой 1 соединен подвес 2 (установлен сверху балки 1). Повес 2 соединен с балкой 1 (с балками 1 при их количестве более одной) с возможностью перемещения вдоль нее, например, с помощью каретки 3 (или с помощью иного возможного механизма перемещения подвеса 2). При этом каретка 3 может иметь специальные ролики 4, которые перемещаются по направляющим (не показаны), выполненным, например, вдоль балки 1. Перемещение каретки 3 с подвесом 2 вдоль балки 1 осуществляется с помощью привода 5, который может быть выполнен гидравлическим (гидроцилиндры), или пневматическим (пневмоцилиндры), или электрическим, или любого другого типа, способного перемещать каретку 3 вдоль балки 1. При этом привод 5 может быть закреплен в любом месте траверсы, обеспечивая свободное перемещение подвеса 2 (в том числе каретки 3 с подвесом 2). Подвес 2 предназначен для соединения с подъемными механизмами (кранами любого типа) с помощью, например, гибких связей (тросов), либо крюков и т.п.
Продольная балка 1 соединена с подвесом 2 с возможностью вращения (поворота) относительно подвеса 2 в своей плоскости (в горизонтальной плоскости вокруг вертикальной оси подвеса 2). Вращение балки 1 возможно в пределах 360˚ в любую сторону (по часовой или против часовой стрелки). Вращение балки 1 относительно подвеса 2 обеспечивается за счет наличия поворотного механизма 6 с приводом. Поворотный механизм 6 может быть выполнен либо, например, на каретке 3 (между кареткой 3 и подвесом 2), либо в любом ином месте траверсы, обеспечивая свободное вращение балки 1 (балок 1) относительно подвеса 2 (относительно места соединения балки 1 с подвесом 2). Поворотный механизм 6 может иметь любой известный тип шарнирного соединения, обеспечивающего поворот балки 1 относительно подвеса 2, в том числе с использованием зубчатых передач, подшипников и т.п. При этом поворотный механизм 6 управляется с помощью привода (не показан), который может быть выполнен любого типа (электропривод, пневмопривод, гидропривод и т.п.).
С продольной балкой 1 (с балками 1, если их более одной) также соединены поперечные балки 7 (подвижно установлены на ней). Балки 7 соединены с балкой 1 с возможностью перемещения вдоль нее. Перемещение каждой балки 7 вдоль балки 1 осуществляется с помощью соответствующего привода 8. Причем привод 8 может быть любого типа, например, электропривод с цепной передачей, либо гидравлический привод (гидроцилиндры), либо пневматический привод (пневмоцилиндры), либо любого иного известного типа, обеспечивающего перемещение соответствующей балки 7 вдоль балки 1 (в том числе с использованием зубчатых реек и шестерен, которые перемещаются по зубчатым рейкам). Количество балок 7 может быть любым от двух и более в зависимости от необходимости, габаритов траверсы и габаритов захватываемых изделий 15.
В вариантном выполнении изобретения одна поперечная балка 7, или часть поперечных балок 7, или все поперечные балки 7 могут быть соединены с одной продольной балкой 1 (или со всеми продольными балками 1 при их количестве более одной) с помощью самостоятельного (другого) поворотного механизма (не показан) с возможностью вращения относительно балки 1. Такое соединение позволяет осуществлять захват изделий 15 даже при нахождении точек захвата не на одной линии, т.е. при несимметричном положении точек захвата на изделиях 15.
Каждая поперечная балка 7 на противоположных концах имеет подвижные грузозахватные устройства 9. Грузозахватные устройства 9 могут быть выполнены, например, в виде консолей, при этом грузозахватные устройства 9 соединены со своими балками 7 с возможностью перемещения вдоль них. Грузозахватные устройства 9 могут быть телескопически соединены со своей балкой 7, при этом перемещение каждого грузозахватного устройства 9 вдоль своей балки 7 осуществляется с помощью соответствующего привода 10. Привод 10 также может быть выполнен любого типа, например, электропривод с цепной передачей (в том числе с зубчатыми рейками и шестернями), либо гидравлический привод (гидроцилиндры), либо пневматический привод (пневмоцилиндры), либо любого иного известного типа, обеспечивающего перемещение каждого устройства 9 вдоль своей балки 7. Каждое грузозахватное устройство 9 имеет грузозахватный элемент 11, который взаимодействует с изделием 15, захват и перемещение которого необходимо осуществить. Элемент 11 выполнен с возможностью перемещения вдоль вертикальной оси, а также с возможностью поворота вокруг вертикальной оси и фиксации в захватываемом изделии 15.
Предложенная автоматическая траверса имеет систему автоматического выравнивания («гуляющий» противовес, не показан), предназначенную для обеспечения необходимого положения траверсы с захваченным ею изделием 15 при смещении центра тяжести траверсы с захваченным изделием 15. Система автоматического выравнивания позволяет быстро и безопасно в автоматическом режиме выполнять операции крепления траверсы к изделию 15 (к модулю), стабилизации траверсы с изделием 15 и дальнейшее ее ровное перемещение и позиционирование в проектом положении.
Предложенная автоматическая траверса имеет блок 12 управления с программным обеспечением (числовое программное управление). Блок 12 управления может быть расположен в любом удобном месте траверсы (либо за ее пределами), при этом он может иметь защитный корпус, обеспечивающий исключение механических воздействий на него. Блок 12 управления с помощью различного типа каналов связи связан с приводами всех подвижных элементов траверсы с возможностью их автоматического позиционирования для захвата перемещаемых изделий 15. Т.е. блок 12 управления связан с приводом 5 перемещения каретки 3 с подвесом 2, с приводом поворотного механизма 6, с приводами 8 перемещения балок 7, с приводами 10 перемещения грузозахватных устройств 9, с приводами (не показаны) перемещения грузозахватных элементов 11, с приводом системы автоматического выравнивания, а также с приводом каждого поворотного механизма (не показан) поперечных балок 7. Причем блок 12 управления может быть связан с указанными приводами проводными или беспроводными каналами связи (в том числе с помощью Wi-Fi). За счет наличия специального программного обеспечения, в памяти блока 12 управления возможно сохранение всех необходимых положений позиционирования траверсы, под любые габариты захватываемых и перемещаемых изделий 15, под конкретные типы (номенклатуры) изделий 15. Блок 12 управления с программным обеспечением позволяет автоматически управлять всеми рабочими органами траверсы, приводя в необходимое положение для захвата изделий 15 любого размера и массы, в том числе со смещенным центром тяжести.
Предложенная автоматическая траверса может иметь один или более одного измерительного датчика расстояния, а также один или более одного весового датчика (не показаны). Такие датчики могут быть расположены в любом необходимом месте траверсы (на подвесе 2, или на балке 1, или на балках 7, или на грузозахватных устройствах 9, или на грузозахватных элементах 11 и т.д.) и они связаны с блоком 12 управления (любыми возможными каналами связи, проводными или беспроводными). Датчики расстояния могут быть выполнены любого типа (например, оптические, ультразвуковые и т.п.) и они предназначены для определения расстояния между крайними точками захвата перемещаемого изделия 15, для измерения габаритных размеров перемещаемого изделия 15 с целью регулировки расстояния между балками 7 и грузозахватными устройствами 9 (при захвате изделия 15 или до захвата), а также для измерения иных расстояний, в том числе при установке изделий 15 в проектное положение. Весовые датчики также могут быть выполнены любого типа, и они предназначены для определения массы перемещаемого изделия 15, для вычисления его центра тяжести с целью последующего автоматического выравнивания центра тяжести траверсы с захваченным изделием 15 для наиболее точного и безопасного перемещения и позиционирования изделия 15 в проектное положение. За счет связи датчиков расстояния и весовых датчиков с программным обеспечением блока 12 управления, вся информация при измерении расстояний и массы перемещаемых изделий 15 поступает в память блока 12 управления и в последующем блок 12 управления автоматически настраивает все рабочие органы траверсы для захвата и перемещения конкретного изделия 15.
При отсутствии указанных измерительных датчиков, предложенная траверса благодаря блоку 12 управления с программным обеспечением может управляться по заданному алгоритму, который записан в памяти блока 12 управления в соответствии с заданными габаритными размерами и массой перемещаемых изделий 15.
Предложенная автоматическая траверса может иметь считыватель меток (не показан), связанный с программным обеспечением блока 12 управления. Метки могут представлять собой штрих коды, QR-коды, а также любые иные элементы, которые несут в себе определенную информацию о захватываемом и перемещаемом изделии 15 (габариты, масса, положение центра тяжести, проектное положение в здании и т.п.). Такие метки могут быть расположены непосредственно на захватываемом изделии 15 или в любом ином месте перед захватом изделия 15. При считывании траверсой с помощью считывателя меток информации с таких меток, сигнал поступает в программное обеспечение блока 12, и от блока 12 управления автоматически поступает сигнал на рабочие органы элементов траверсы. Т.е. автоматически приводятся в действие приводы 5, 8, 10, привод поворотного механизма 6, а также приводы грузозахватных элементов 11, приводя рабочие органы траверсы в такое положение, которое обеспечивает точный захват конкретного изделия 15 с такой меткой, а также точное автоматическое перемещение в необходимое проектное положение и точное автоматическое позиционирование изделия 15 в проектном положении.
Также предложенная автоматическая траверса может иметь одну или несколько видеокамер 13, а также систему 14 освещения. Видеокамеры 13 позволяют следить за всем процессом захвата, перемещения и установки изделий 15, что позволяет в случае необходимости корректировать позиционирование траверсы с изделием 15. А система 14 освещения позволяет осуществлять работу и слежение за работой даже в ночное время.
Работает предложенная траверса следующим образом.
Далее рассмотрен пример работы траверсы при захвате такого изделия 15, как крупногабаритный готовый объемный модуль, представляющий собой 3-х комнатную квартиру, которая должна быть расположена, например, на третьем этаже строящегося жилого здания. Однако следует понимать, что предложенная траверса работает аналогичным образом при захвате и перемещении любых иных изделий 15 при строительстве и сооружении зданий любого типа, в том числе жилых и общественных, а также мест общего пользования (лифты, приквартирные холлы и т.п.). При этом управление траверсой может быть как автоматическим, так и с применением ручного труда в случае необходимости.
Кроме того, в памяти блока 12 управления могут быть заранее записаны алгоритмы работы траверсы, либо могут задаваться в необходимой последовательности. При этом при наличии меток изделия 15, траверса может считывать автоматически информацию с таких меток, а при необходимости может игнорировать такую информацию и управляться в соответствии с заданным алгоритмом.
Например, изделие 15 (крупногабаритный готовый объемный модуль, представляющий собой 3-х комнатную квартиру, которая расположена на третьем этаже) имеет QR-код, который несет в себе следующую информацию об изделии 15: габаритные размеры объемного модуля, его масса, расположение мест захвата, предполагаемое положение его центра тяжести, проектное положение в строящемся здании и т.п.
Автоматическая траверса с помощью считывателя меток считывает информацию с QR-кода, сигнал с такой информацией поступает в программное обеспечение блока 12 управления. Далее блок 12 управления дает команду приводам рабочих органов траверсы на занятие определенного положения. Система приводов приводит в необходимое положение балку 1, а также балки 7 и грузозахватные устройства 9. при необходимости датчики расстояния измеряют размеры изделия 15, а также расстояние между местами его захвата. Далее траверса автоматически с помощью элементов 11 захватывает изделие 15 и взвешивает его, информация о чем поступает в блок 12 управления. При отклонении предполагаемого центра тяжести захваченного изделия 15 от заранее рассчитанного, система автоматического выравнивания автоматически приводит противовес в необходимое положение, придавая траверсе с захваченным изделием 15 точное, ровное положение. Далее (в соответствии с имеющейся информацией) подъемный механизм перемещает траверсу с изделием 15 в необходимое проектное положение, где траверса автоматически позиционирует изделие 15 на третьем этаже здания. Если проектное положение такого изделия 15 должно быть развернуто, например, на 180˚, то траверса также автоматически приводит в действие привод поворотного механизма 6, максимально точно позиционируя изделие 15 в необходимом положении. После точной установки изделия 15 в проектном положении, грузозахватные элементы автоматически отсоединяются от изделия 15, и траверса в соответствии с заданным алгоритмом работы далее перемещается подъемным механизмом к следующему изделию 15 с целью его захвата и перемещения в необходимое проектное положение аналогичным образом.
Таким образом, благодаря такому выполнению автоматической самопозиционирующейся полноповоротной настраиваемой траверсы, существенно сокращается время простоев при строительстве зданий. Благодаря автоматическому управлению приводами рабочих органов траверсы (с помощью программного обеспечения блока 12 управления), обеспечивается максимально точное положение рабочих органов при захвате любого типа изделий 15, информация о которых может храниться в памяти блока 12 управления. При этом блок 12 управления может давать команды для занятия рабочими органами траверсы любого положения до миллиметра, что исключает любые погрешности, повышает точность захвата и позиционирования изделия 15, исключает необходимость применения ручного труда. Кроме того, программное управление траверсой обеспечивает максимально точное позиционирование и установку крупногабаритного изделия 15 в проектном положении при строительстве зданий, в результате чего существенно повышается скорость возведения зданий.
Автоматическая регулировка расстояний между балками 7, а также между грузозахватными устройствами 9 позволяет траверсе работать с модульными блоками различных размеров, не останавливая процесс работы. Соединения траверсы с модулем (перемещаемым изделием 15) имеют несколько фиксированных позиций, которые сохраняются в памяти блока 12 управления, и в последующем нет необходимости дополнительной настройки положения грузозахватных элементов 11. Выдвижные консоли (устройства 9) облегчают маневры траверсы с перемещаемыми изделиями 15 (модулями), а возможность поворота балки 1 на 360° обеспечивает быстрое и максимально точное позиционирование модуля в проектном положении.
Кроме того, блок 12 управления с программным обеспечением может быть связан с подъемными устройствами (кранами, с которыми соединена траверса), при этом за счет такой связи работа траверсы может быть согласована с работой подъемных механизмов при перемещении траверсой изделий 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| ЭЛЕКТРОМАГНИТНАЯ ТРАВЕРСА С ГРУЗОСТРАХОВОЧНЫМ УСТРОЙСТВОМ | 2010 |
|
RU2437825C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| ПОДЪЕМНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1997 |
|
RU2112736C1 |
| МАГНИТНАЯ ТРАВЕРСА С ЭЛЕКТРОПОСТОЯННЫМИ МАГНИТНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2582742C1 |
| Мобильный портальный транспортер | 2023 |
|
RU2796172C1 |
| Поточная линия для изготовления сварных изделий | 1979 |
|
SU872146A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНОГО ЗЕРКАЛА ТЕЛЕСКОПА С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 2024 |
|
RU2837324C1 |
Изобретение относится к грузозахватному устройству, используемому с подъемными механизмами для захвата, подъема, опускания и перемещения крупногабаритных изделий. Траверса содержит по меньшей мере одну продольную балку (1), подвес (2) с приводом (5), соединенный с по меньшей мере одной продольной балкой (1) с возможностью перемещения вдоль нее, поперечные балки (7) с приводами (8), соединенные по меньшей мере с одной продольной балкой (1) с возможностью перемещения вдоль нее, соединенные с каждой поперечной балкой (7) с возможностью перемещения вдоль нее грузозахватные устройства (9) с приводами. По меньшей мере одна продольная балка (1) соединена с подвесом (2) с помощью поворотного механизма (6) с возможностью вращения относительно подвеса (2). Траверса снабжена блоком (12) управления, связанным с приводами подвеса (2), поперечных балок (7), грузозахватных устройств (9) и поворотного механизма (6) с возможностью автоматического позиционирования. Обеспечивается возможность автоматического захвата и позиционирования крупногабаритных изделий любых размеров, повышение точности установки крупногабаритных изделий в проектное положение, исключение необходимости использования ручного труда при захвате изделий, повышение скорости возведения зданий и сооружений. 7 з.п. ф-лы, 8 ил.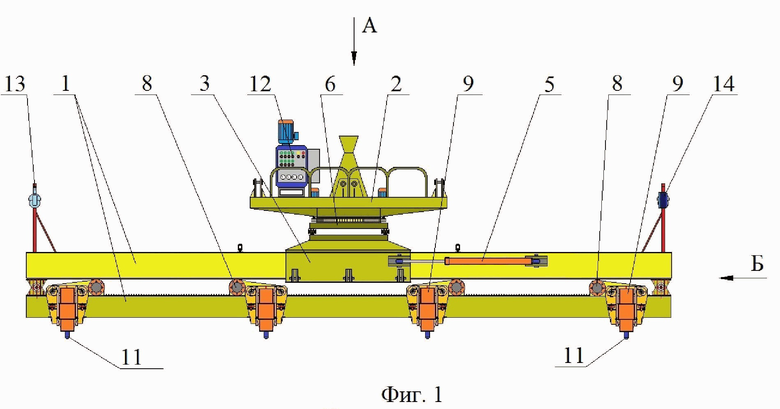
1. Траверса, содержащая по меньшей мере одну продольную балку, подвес с приводом, соединенный с по меньшей мере одной продольной балкой с возможностью перемещения вдоль нее, поперечные балки с приводами, соединенные по меньшей мере с одной продольной балкой с возможностью перемещения вдоль нее, и соединенные с каждой поперечной балкой с возможностью перемещения вдоль нее грузозахватные устройства с приводами, отличающаяся тем, что по меньшей мере одна продольная балка соединена с подвесом с помощью поворотного механизма с возможностью вращения относительно подвеса, при этом траверса снабжена блоком управления, связанным с приводами подвеса, поперечных балок, грузозахватных устройств и поворотного механизма с возможностью автоматического позиционирования.
2. Траверса по п.1, отличающаяся тем, что она снабжена по меньшей мере одним измерительным датчиком расстояния, связанным с блоком управления.
3. Траверса по п.1, отличающаяся тем, что она снабжена по меньшей мере одним весовым датчиком, связанным с блоком управления.
4. Траверса по п.1, отличающаяся тем, что она снабжена по меньшей мере одной видеокамерой.
5. Траверса по п.1, отличающаяся тем, что она снабжена по меньшей мере одним считывателем меток, связанным с блоком управления.
6. Траверса по п.1, отличающаяся тем, что она имеет систему выравнивания, связанную с блоком управления.
7. Траверса по п.1, отличающаяся тем, что она имеет систему освещения.
8. Траверса по п.1, отличающаяся тем, что по меньшей мере одна поперечная балка соединена с по меньшей мере одной продольной балкой с помощью другого поворотного механизма с возможностью вращения относительно по меньшей мере одной продольной балки, при этом привод другого поворотного механизма связан с блоком управления.
| Универсальная траверса | 1987 |
|
SU1493592A1 |
| JP S56037985 A, 11.04.1981 | |||
| 0 |
|
SU166835A1 | |
| Траверса для перегрузки листового материала | 1976 |
|
SU673581A1 |

