к землероино- именно к бульИзобретение относится транспортным машинам, а дозерам.
Бульдозер может совершать рабочий процесс в разных грунтовых условиях, в зависимости от которых изменяется оптимальный режим процесса конания, соответствующий максимальной производительности.
Целью изобретения является повышение производительности бульдозера за счет учета грунтовых условий путем оптимизации задаваемых верхнего и нижнего пределов регулирования скорости движения бульдозера.
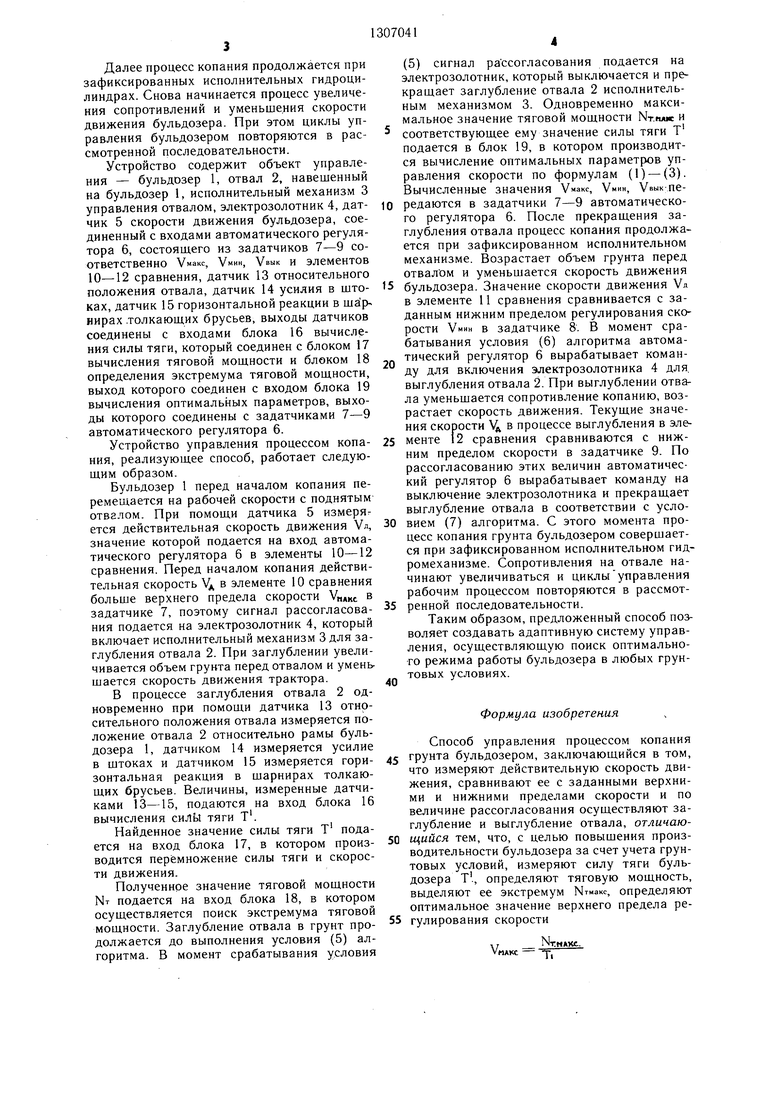
На фиг. 1 показаны зависимости скорости движения УД, коэффициента буксования б и тяговой мощности NT от силы тяги т бульдозера (сплошные кривые соответствуют прочному грунту, а пунктирные - грунту малой прочности, точка 1 экстремума тяговой мощности Ымакс определяет режим максимальной производительности, точка 2 минимума тяговой мощности NTMIIH определяет зону неравномерности регулирования); на фиг. 2 - блок-схема для реализации предлагаемого способа.
По значению максимума тяговой мощности Нт.мдхс и соответствующей его силе тяги т определяют оптимальное значение верхнего предела регулирования скорости по формуле
V макс :
NT
(1)
Нижний предел регулирования скорости движения вычисляют по формуле
УЛ 7 - D
мин Умакс 10 Z-f-Op
(2)
где бр - степень неравномерности регулирования, принимаемая для бульдозеров в пределах
бр 0,05-0,15.
Скорость Увык, при которой прекращают заглубление или выглубление отвала, определяют по формуле
Увык Ун«н{1 - ) -f УКАКСЛ,
(3)
если NT
NT
..,j о, то X Хвык;
если Уд - УМИН ; о, то X -хвкл; если Ул - УВЫК О, то X -Хвык,
(4) (5) (6) (7)
где X - постоянный коэффициент, который задают . 0,9 для процесса копания и ,5 для процесса транспортирования призмы грунта.
Алгоритм работы системы управления имеет следующий вид:
если Уд-У макс О, то X X вкл;
где X - параметр управления золотником распределителя;
0
Хвкл, -Хвкл - параметры включения золотника для заглубления и выглубления отвала;
Хвык, -Хвык - параметры прекращения заглубления и прекращения выглубления отвала.
Управление процессом копания по способу осуществляется следующим образом.
В исходном положении перед копанием бульдозер перемещается, на рабочей .передаче с поднятым отвалом. Измеряют действительную скорость Уд движения бульдозера и осуществляют ее сравнение с верхним пределом регулирования скорости Умакс. Действительная скорость движения Уд в этот момент больше скорости Умакс, поэтому воз5 никает рассогласование в условии (4) алгоритма, с помощью которого вырабатывают команду для заглубления отвала в грунт. При заглублении отвала увеличивается объем призмы грунта и силы сопротивления, уменьшается скорость движения. Одновременно при заглублении отвала определяют силу тяги бульдозера, вычисляют тяговую мощность и по условию (5) алгоритма сравнивают текущее значение тяговой мощности NT,- с последующим . Если
5 разность NT/-NT(j4i) О, то продолжают заглубление отвала в грунт.
Этот этап процесса копания соответствует увеличению тяговой мощности и приближению процесса к гжстремуму в точке 1 {фиг. 1).
0 Когда разность сравниваемых величин NT; - NT((.I) меняет знак, т.е. удовлетворяется условие (5) алгоритма, прекращают заглубление отвала в грунт. В этот момент фиксируют максимальное значение тяговой мощности N.Mu,. соответствующее значение силы тяги т и вычисляют по формуле (1) оптимальное значение верхнего предела регулирования скорости Умакс, ПО формуле (2) вычисляют нижний предел регулирования скорости УИИН и по формуле (3) вычисляют скорость УВЫК. Вычисленные параметры используют для последующего управления процессом копания.
После прекращения заглубления отвала процесс копания продолжают при зафиксированных гидроцилиндрах исполнительного механизма, при этом возрастает толщина вырезаемой стружки и объем грунта перед отвалом, соответственно уменьшается скорость Уд движения трактора. В процессе копания сравнивают текущее значение скорос0 t. нижним пределом регулирования скорости УМ,„. В момент выполнения условия (6) алгоритма начинают выглубление отвала из грунта. При выглублении отвала скорость движения Уд бульдозера увеличивается, поэтому в процессе выглубления срав5 нивают действительную скорость Уд с заданным базовым значением Увык. В момент выполнения условия (7) алгоритма прекращают выглубление отвала.
5
0
5
Далее процесс копания продолжается при зафиксированных исполнительных гидроцилиндрах. Снова начинается процесс увеличения сопротивлений и уменьшения скорости движения бульдозера. При этом циклы управления бульдозером повторяются в рассмотренной последовательности.
Устройство содержит объект управления - бульдозер 1, отвал 2, навешенный на бульдозер 1, исполнительный механизм 3 управления отвалом, электрозолотник 4, датчик 5 скорости движения бульдозера, соединенный с входами автоматического регулятора 6, состоящего из задатчиков 7-9 соответственно Умакс, VMHH, VBUK И элементов 10-12 сравнения, датчик 13 относительного положения отвала, датчик 14 усилия в штоках, датчик 15 горизонтальной реакции в ша(р- вирах .толкающих брусьев, выходы датчиков соединены с входами блока 16 вычисления силы тяги, который соединен с блоком 17 вычисления тяговой мощности и блоком 18 определения экстремума тяговой мощности, выход которого соединен с входом блока 19 вычисления оптимальных параметров, выходы которого соединены с задатчиками 7-9 автоматического регулятора 6.
Устройство управления процессом копания, реализующее способ, работает следующим образом.
Бульдозер 1 перед началом копания перемещается на рабочей скорости с поднятым отвалом. При помощи датчика 5 измерят ется действительная скорость движения Уд, значение которой подается на вход автоматического регулятора 6 в элементы 10-12 сравнения. Перед началом копания действительная скорость Уд в элементе 10 сравнения больше верхнего предела скорости УПАКС в задатчике 7, поэтому сигнал рассогласования подается на электрозолотник 4, который включает исполнительный механизм 3 для заглубления отвала 2. При заглублении увеличивается объем грунта перед отвалом и умень шается скорость движения трактора.
В процессе заглубления отвала 2 одновременно при помощи датчика 13 относительного положения отвала измеряется положение отвала 2 относительно рамы бульдозера 1, датчиком 14 измеряется усилие в штоках и датчиком 15 измеряется горизонтальная реакция в шарнирах толкающих брусьев. Величины, измеренные датчиками 13-15, подаются на вход блока 16 вычисления сиЛь тяги Т .
Найденное значение силы тяги Т подается на вход блока 17, в котором производится перемножение силы тяги и скорости движения.
Полученное значение тяговой мощности NT подается на вход блока 18, в котором осуществляется поиск экстремума тяговой мощности. Заглубление отвала в грунт продолжается до выполнения условия (5) алгоритма. В момент срабатывания условия
(5) сигнал рассогласования подается на электрозолотник, который выключается и прекращает заглубление отвала 2 исполнительным механизмом 3. Одновременно максимальное значение тяговой мощности Ыт.плж и соответствующее ему значение силы тяги Т подается в блок 19, в котором производится вычисление оптимальных параметров управления скорости по формулам (1) - (3). Вычисленные значения Умакс, Умин, УВЫК пе0 редаются в задатчики 7-9 автоматического регулятора 6. После прекращения заглубления отвала процесс копания продолжается при зафиксированном исполнительном механизме. Возрастает объем грунта перед отвал ом и уменьшается скорость движения
5 бульдозера. Значение скорости движения Уд в элементе 11 сравнения сравнивается с заданным нижним пределом регулирования скорости УМНН в задатчике 8. В момент срабатывания условия (6) алгоритма автоматический регулятор 6 вырабатывает команду для включения электрозолотника 4 для. выглубления отвала 2. При выглублении отвала уменьшается сопротивление копанию, возрастает скорость движения. Текущие значения скорости в процессе выглубления в эле5 менте 12 сравнения сравниваются с нижним пределом скорости в задатчике 9. По рассогласованию этих величин автоматический регулятор 6 вырабатывает команду на выключение электрозолотника и прекращает выглубление отвала в соответствии с усло0 вием (7) алгоритма. С этого момента процесс копания грунта бульдозером совершается при зафиксированном исполнительном гидромеханизме. Сопротивления на отвале начинают увеличиваться и циклы управления рабочим процессом повторяются в рассмот5 ренной последовательности.
Таким образом, предложенный способ позволяет создавать адаптивную систему управления, осуществляющую поиск оптимального режима работы бульдозера в любых грунтовых условиях.
Формула изобретения
Способ управления процессом копания грунта бульдозером, заключающийся в том, что измеряют действительную скорость движения, сравнивают ее с заданными верхними и нижними пределами скорости и по величине рассогласования осуществляют заглубление и выглубление отвала, отличаю- 0 щийся тем, что, с целью повышения производительности бульдозера за счет учета грунтовых условий, измеряют силу тяги бульдозера Т1, определяют тяговую мощность, выделяют ее экстремум Ытмакс, определяют оптимальное значение верхнего предела ре- 5 гулирования скорости
УМАКС -
NT.
.
и оптимальное значение нижнего предела регулирования скорости
/ V
VM«H- v««c 2 -Ь б„
где бр - степень неравномерности регулирования,
а заглубление и выглубление отвала осуществляют до их среднего значения.
. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2004 |
|
RU2291254C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Способ управления бульдозером и устройство для его осуществления | 1985 |
|
SU1339285A1 |
| Способ регулирования рабочих процессов землеройно-транспортных машин | 1974 |
|
SU569683A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
Изобретение относится к землеройно- транспортной технике и позволяет с высокой производительностью осуш.ествлять процесс копания бульдозера за счет учета грунтовых условии путем оптимизации задаваемых верхнего и нижнего пределов регулирования скорости его движения. Для этого в процессе копания измеряют действительную скорость Уд движения и силу тяги Т бульдозера. Определяют тяговую мощность NT и выделяют ее экстремум NT.«, По значениям NT.HAKC. и Т определяют оптимальное значение верхнего предела регулирования скорости Умакс по формуле NT макс/т . Оптимальное значение нижнего предела регулирования скорости Умни определяют по формуле УМИН Умакс(2-o,,/2+a,,j где Ор - степень неравномерности регулирования. В течение всего рабочего процесса УД сравнивают с Умакс, Умнн и Увык, где УВЫК - скорость, при которой прекращают заглубление или выглубление отвала. По результатам сравнения осуществляют управление отвалом. При этом заглубление и выглубление отвала осуществляют до достижения Умакс и УМИН средних значений. 2 ил. с сл оо о о 
| Теория самоходных колесных землерой- но-транспортных машин | |||
| М.: Машиностроение, 1969 | |||
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
