В настоящее время широко известен способ получения производной в системах автоматического регулирования включением в непь сигнала пасснвиых .RIC-neneH. Его иедоста ток заключается в том, что нередаточиая функиня наряду с дифференнируюи1,им звеио: 1 содержит апериодическое, т. е. выходной сигнал имеет инерциоиную составляюи1ую.
Предложенный способ получения производной позволяет осун1,ествлять чистое днфферен.цирование. Для этого инерциоииую составляюнJ,yю заменяют составляюи1ей чистого запаздывания, благодаря чему, производя экстраполяцию результата на величииу запаздывания, получают чистую производную снгиала.
Для введения чистого запаздывания и получеиия производиой онерацня днфференнирования заменяется операцией вычитания интегралов, взятых на двух смежных н равных по длительности участках регистрируемого процесса. Это позволяет получать инфорл1ацию о производиой процесса дискретно н новысить точность, так как операцню iniTerpH.рования можно осуи1ествлять точио.
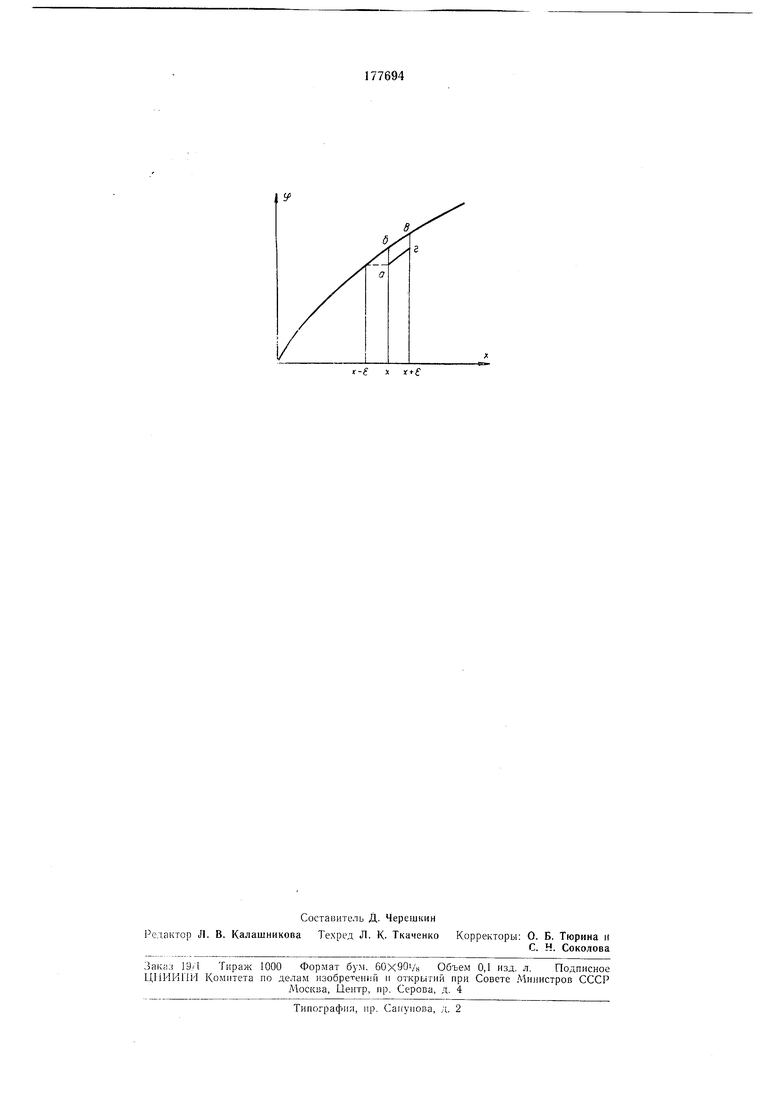
Способ гюлучения производной входного сигнала иллюстрируется чертежом.
нию илои1.аД1 5„,:,,, , которг.я является разкостью интегралов получения и A--i--. TaKofi способ иолучеиия нронзводнсн справедЛН1. когда сг{Л) на участке интегрнроваиия 1;меет только один экстремум.
Выиолнение этого требования обеспечивается 15ыбором ДЛЯ Koiir:peTiioro процесса необxo;uiMOro Hiara инте рнрования f.
величивая иитерг ал интегрирования к, даииый сиособ можио ир11менять для слшественно ннерннониых процессов.
Предмет изобретен н я
Способ получения пропзводиой входиого гнтнала больию ; длительности и.П дискретного вида, пт.1ича:о1Ц111ия тем, что, с целью 1;о1 ыц1еция точности оиергадии днфференпнро1 ан11Я н исключения апериодического в
иередаточио функцни реа.чьиого элемеита, инерционную составляюн1ую заменяют составляюн1ей чистого запаздывания нутем онераций вычитания интегралов сигнала за соседь.ие и равные интеркалы премени, делящие
кр1П5ую снгнала на отрезки, имеюни1е не более одного экстрем ма, г ричом полученная разность ннтеграло;5 процорцнональна скорости нзменеиия сигигкта с отставанием на ни1 ервал интегрирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПРОИЗВОДНОЙ В ДИСКРЕТНЫХ СИСТЕМАХ | 1966 |
|
SU177690A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2015 |
|
RU2584400C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ДВУХПОЛЮСНЫХ ЦЕПЕЙ | 2001 |
|
RU2212677C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ РАДИОАКТИВНОГО ПРЕПАРАТА ВНУТРИ ИССЛЕДУЕМОГО ОБЪЕКТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2349932C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265855C1 |
| Способ преобразования частоты следования импульсов в код | 1974 |
|
SU528701A1 |
| Дифференцирующе-сглаживающее устройство | 1980 |
|
SU911550A1 |
| ПРОГНОЗАТОР | 1996 |
|
RU2113006C1 |
| Устройство для стабилизации объекта упругой конструкции | 1988 |
|
SU1532897A1 |
| Способ измерения магнитного потока | 1973 |
|
SU481864A1 |