(54) СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО ПОТОКА
1
Изобретение относится к области маг- ниткой измерительной техники.
Известные снособы измерения магнитного нотока не м.огут обеснечить bbtcoкую точность и быстродействие измерения, если измерители магнитного нотока расположены в воздуигном зазорез машиныи предназначены для организации управления бесконтактными двигателями переменного тока, возлагая на них функцию датчиков углового положения роторов этих машин. Сигналы с измерителей потока управляют работой преобразователей, питакпщх обмотки машин.
Так в случае применения датчиков Холла для измерения магнитного пЬтока машин, имеющих зубцы, в частности на индукторе, в выходном сигнале датчиков появляются пульсации. Для их сглаживания необходимо применять фильтры, вносящие запаздывание в верхней части диапазона скоростей (частот) вращения. Кроме того, датчики Холла имеют большой разброс I крутизны преобразования, зависимость кру-тизны от температуры, нелинейность
|ходной характеристики, обусловленную вторичным эф4)ектом Холла, явлением магнитосопротивления, герметическими факторами. Все это приводит к ошибке 5 измерения.,
При использованни электромагнитных устройств также приходится применять сглаживающие фильтры, имеющие значительные постоянные времени, так как
0 частота питания этих устройств, особенно встроенных в машину, не может быть выбрана достаточно высокой.
Можно измерить переменный магнитный поток путем интегрирования его производ5 ной по времени, например с помощью : интегрируюш:их операпионных усилителей. Однако провести .операцию интегрирования с высокой точностью в области маль частот изменения потока не удает ся, таккак
0 конденсаторы имеют конечную величину сопротивления утечки, а операционные усй лители дрейф нуля. В результате этого появляется ошибка тем большая, чем ниже частота измёненй-а потока. Этот способ,
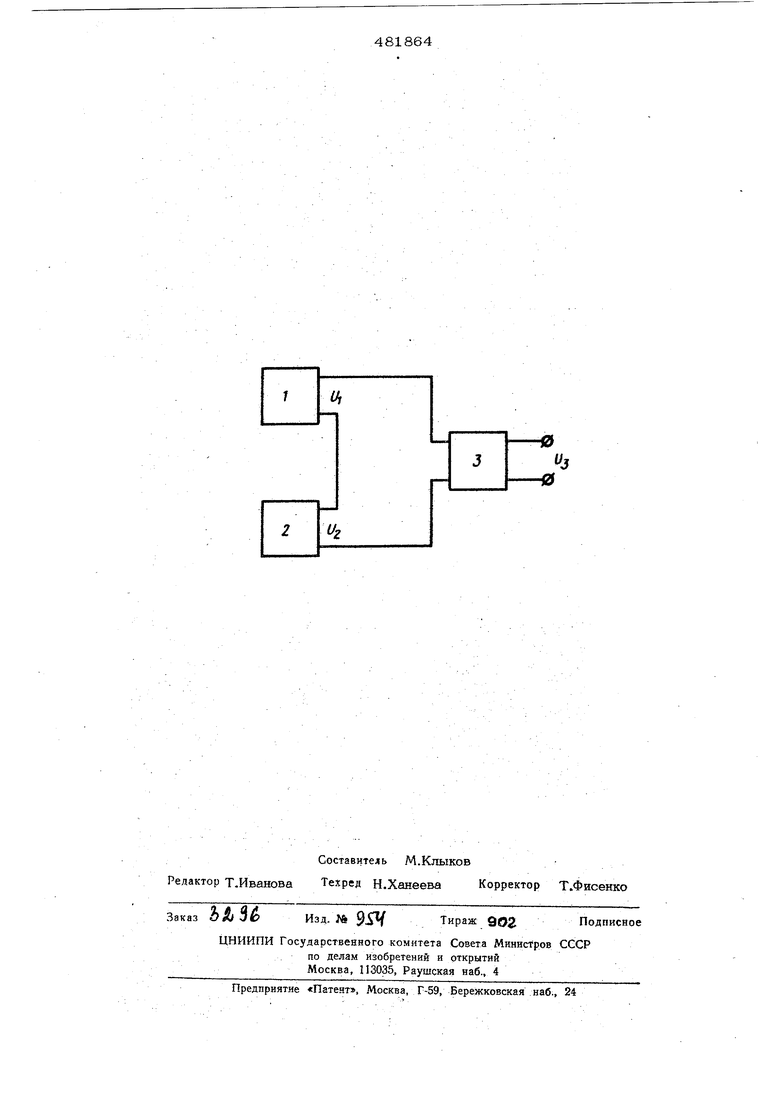
5 , кроме того, не дает возможности опредеj лить поток машины в статике, т. е. когда машина заторможена. Целью изобретения является увеличение точности измерения, расширение част ного диапазона и исключение запаздывани в отработке измерителем изменения потока. Поставленная цель достигается тем, что с помощью грубого датчика, который имее выходной сигнал с пульсацией и ошибками измерения, производят измерение «магнит ного потока в статике и на низких частотах его изменения, а с «омошыо точ ного - измерение производной потока по Времени, Затем полученные сигналы сумм руют и производят операцию интегрирования с помощью фильтра, представляюшего собой апериодическое звено. Постоянную времени этого звена выбирают равной отношению кoэ4x|JИЦиeнтa преобразования датчика производной потока к коэффициенту преобразования датчика потока. В этом случае выходное напрялсение фильтра будет пропорционально мгН{}е,.у зна-чению по тока и будет отрабатьгваПз изменение. по- тока практически без запаздываний. а чертенке представлена блок-схема устройства, реализующего предлагаемый с соб применительно к измерению потока .машины по одной из осей, Устройство содержит датчик 1 произво ной потока (например измерительная обмотка в машине), датчик 2 потока {датчи Холла или электромапштные устройства), фильтр 3. Выходное напряжение Ui датчика производной потока 1 определяется выражением (К - ког)44ИЦиент преобразования И -k dt или в операторной форме и, К,рФ(1) Напряжение (j с датчика потока 2 ра |но (К - коэффициент преобразования) .Ф Коэффициент преобразования К датчика потока при учете его ошибок измерения в общем случае выражается в виде , сз) KJ KO± ДК где К - средняя расчетная величина; д| - ошибка преобразования. .. С учетом (3) напряжение U (выражение 2) будет равно. . и,ь(Кр±АК)ф. (4) Передаточная функция фильтра 3, представляюшего собой апериодическое звено, имеет вид (коэффициент передачи принят 1 равным 1) К 3 Ui + U 1-нТр Используя (1), (4) и (5), определяют выходное напряжение фильтра J ,).К,(К,РФ К„Ф±ДКФ)у Выносят К ф за скобки , к.ФС,.4 -кГр1Т Можно показать, что выбором соотношения меяду коэффициентами преобразования датчика производной потока К и датчика потока К , т. е. 1-. )) можно полу° 0чить желаемую зависимость выходного и от магнитного потока напряжения Если выполнить условие T О (7J и заменить р на .{ш , то получают II - 1C гЬ /1 V, из-КцФи- itjTi«j Из выражений (6) и (8) следует, что предлагаемый способ позволяет резко уменьшить ошибку измерения, а следовательно, / запаздывание при отработке изменения потока, за счет выбора соответствующей величины постоянной времени Т при известном диапазоне изменения потока. В пределе при Тсо- из выражения (8) получают , т, е, выходное напряжение становится прямо пропорциональным магнитному потоку и отрабатывает его изменение в переходных режимах без запаздывания. На практике необходимую величину постоянной времени наиболее удобно получать путем, изменения коэф(}дациента преобразования датчика производной потока К при К const (см. выражение 7). Предмет изобретения Способ измерения магнитного потока, заключающийся в одновременном испольовании двух датчиков, отличающий- я тем, что, с целью увеличения точности, асширения диапазона и уменьшения запаздыания, с помощью глубокого датчика произвоят измерение магнитного потока, а с помощью точного датчика - измерение производной потока по времени, суммируют полученные результаты измерения и интегрируют резуль тирующий сигнал с постоянной временя, равной отношению коэффициента преобразования датчика производной потока к коэффициенту преобразования датчика потока.
