Изобретение относится к измерительной и поверочной технике по измерению скоростей газовых потоков.
Известны решения, позволяющие градуировать датчики термоанемометров (ТА) по скорости потока. Устройство для градуировки датчиков ТА содержит аэродинамическую трубу с многоступенчатым поджатием потока, эталонный датчик скорости в узком сечении трубы и градуируемый датчик в широком. Устройство позволяет осуществлять статическую, но не динамическую градуировку.
Наиболее близким по технической сущности к предлагаемому устройству является устройство, содержащее заглушенную камеру, рабочий участок, соединенный с ней посредством катеноидального рупора и акустически согласованный с источником звуковых волн, подключенного через усилитель мощности к первому выходу генератора гармонических колебаний, второй выход которого, а также первый вход соединены с
задатчиком скорости, второй выход задатчика скорости подключен к вентилятору, аэродинамически связанным с устройством для создания потока, а также находящиеся на рабочем участке датчики средней скорости, температуры, давления, влажности и звукового давления, подключенные к блоку обработки и вычисления, выходы которого соединены со входами регистратора, причем третий выход генератора гармонических колебаний подключен к соответствующему входу блока обработки и вычисления.
В устройстве определяется динамическая градуировочная зависимость по скорости, что требует создания в потоке одновременно среднего течения газа v и гармонически меняющейся со временем пульсационной скорости v . Конструктивные особенности такого решения приводят к возбуждению паразитного шума, что увеличивает погрешность градуировки. Кроме того, используемая заглушенная камера
X XI
СО
увеличивает нагрузку на вентилятор и габариты устройства.
Целью изобретения является повышение точности и производительности процесса градуировки.
Поставленная цель достигается тем, что в устройство для динамической градуировки вводятся цилиндрический шумопоглоти- тель с блоком управления, экстремальный оптимизатор,вычислитель дисперсии, блок оптимизации периода осреднения, блок вычисления периодов, при этом выходы задат- чика скорости и генератора гармонических колебаний подключены соответственно к первым и вторым входам блока вычисления периодов и блока оптимизации периода осреднения, выходы блока вычисления периодов соединены соответственно с третьим и четвертыми входами блока оптимизации периода осреднения, первый выход которого соединен с первым входом вычислителя дисперсии и первым управляющим входом блока управления шумопоглотителем, второй - со вторым входом экстремального оптимизатора и вторым управляющим входом блока управления шумопоглотителем, датчик звукового давления через вычислитель дисперсии подключен к первому входу экстремального оптимизатора, информационный выход блока управления шумопоглотителем подключен к третьему входу экстремального оптимизатора, выход которого связан с третьим управляющим входом блока управления шумопоглотителем, причем заглушенная камера выполнена цилиндрической, а ее боковые стенки покрыты звукопоглощающим материалом, передняя по потоку стенка выполнена в виде гофрированной плиты с квадратными отверстиями, кромки которых скошены со стороны рабочего участка под углом 40-60°.
На чертеже изображена схема устройства, которое содержит: 1 - источник звуковых колебаний, 2 - диффузор, 3 - рабочий участок, 4 - конфузор, 5 - заглушенную камеру, 6 - вентилятор, 7 - шумопоглотитель, 8 - задатчик скорости, 9 - генератор гармонических колебаний, 10 - блок оптимизации периода осреднения, 11 - вычислитель дисперсии, 12 - экстремальный оптимизатор, 13 - блок управления, 14 - электродвигатель с приводом, 15 - датчик звукового давления, 16 - блок вычисления периодов, 17 - индикатор диапазона.
Датчик 15 звукового давления располагают в рабочем участке 3 заподлицо со стенкой. Акустическое согласование рабочего участка 3 осуществляют с одной стороны с помощью диффузора 2, о другой - с помощью конфузора 4 и заглушенной камеры
5. С помощью задатчика скорости 8 осуществляют управление вентилятором 6 и подают скоростной сигнал Uv на блок 10 оптимизации периода осреднения и блок 16
вычисления периодов. Генератор 9 соединен с источником 1 звуковых колебаний и другим выходом с блоками 10 и 16. Выходы блока 10 подключены к соответствующим входам блока 13 управления и экстремального оптимизатора 12, а также к первому входу вычислителя 11 дисперсии. Датчик 15 звукового давления соединен через вычислитель 11 дисперсии с первым входом экс- тремального оптимизатора 12.
Экстремальный оптимизатор 12 через блок 13 управления и электродвигатель 14, снабженный приводом к шумологлощающим пластинам в блоке 7, соединен с шумопоглотителем 7, располагаемым на входе вентилятора. Выход шумопоглотителя 7 подключен к соответствующему входу блока 13 через индикатор 17 диапазона ко входу блока 12 и служит для сигнализирования о достижении пластинами крайнего положения.
Устройство работает следующим образом.
При проведении градуировки в рабочем участке 3 с помощью задатчика 8 скорости и вентилятора 6 устанавливают поток газа со средней скоростью v и возбуждаю звуковую волну с частотой f3B. Аналоговые величины Uv и Uf3B принадлежат градуиро- вочному диапазону и вырабатываются соответственно задатчиком 8 скорости и генератором 9 гармонических колебаний. Uv и Uf3B подаются на два независимых входа блока 16 вычисления периодов. В блоке 16 вычисляется характерный период шумовых колебаний, генерируемый лопастями вентилятора, по формуле
Ti Ci (1)
где Ci - коэффициент пропорциональности, определяющий линейную в первом приближении связь между характерным периодом возбуждаемых вентилятором колебаний и средней скоростью потока v, и период гар
монических звуковых колебаний
Т2
1
После этого величины Ti и Та сравниваются между собой в блоке 10 оптимизации пери- ода осреднения и на первом выходе блока 10 вырабатывается сигнал Тт, соответствующий максимальному из TI и Та периоду
г Ti, Ti - Та 0 , 1Т2,Т1-Т2 0.
(3)
DP
- /
Tm о
P(t)dt
(5)
Сигнал Tm поступает на вычислитель 11 дисперсии, где устанавливается необходимый для работы этого блока перибд осреднения равный Тт.
Сигналы Uy и USE поступают также на первый и второй входы блока 10, где при их существенном изменении (т.е. при установлении новых градуировочных значений скорости и частоты) на второй вход блока 13 управления со второго выхода блока 10 поступает сигнал Up, разрешающий работу блока 13. Блок 13 управления вычисляет величину управляющего напряжения Uynp
., Сз/д Ст, ...
Uynp - .(Ч)
I m
где Сэ/д - коэффициент пропорциональности между напряжением не- злектродвигате- ле и числом оборотов вала электродвигателя
14, Ст --гт-, где NK и М - число периодов
Тт и число оборотов электродвигателя 14 за полный разворот пластин в блоке шумопог- лотителя 7. Т.о. управляющему напряжению на электродвигателе 14 ставится в соответствие период осреднения Тт. Под действи- ем Uynp в электродвигатель 14 с помощью привода начинает вращать шумопоглощаю- щие пластины в шумопоглотителе 7, причем тем медленнее, чем больше период осреднения Тт. При изменении положения пластин меняется акустическое сопротивление блока 7 и соответственно меняется величина звукового шума Р в рабочем участке 3. Сигнал Р с датчика 15 звукового давления поступает на вычислитель 11 дисперсии, где возводится в квадрат и осредняется по времени Тт
Тт
Далее сигнал Dp поступает в экстремальный оптимизатор 12, где сравнивается со значением дисперсии Dp min, хранящимся в его памяти. Если Dp Dp min, то в памяти записывается новое значение Dp mm Dp; (за первоначальное значение Dp min принимается значение дисперсии Dp в момент начала разворота пластин). Таким образом, за время полного разворота шумопоглощающих пластин в блоке 7 в памяти экстремального оптимизатора 12 остается величина дисперсии Dp , соответствующая минимальному значению шума Р в рабочем участке 3. По достижении пластинами крайнего положения в блоке 7 вырабатывается импульс Upeo по которому вал электродвигателя 14 начинает вращаться вместе с пластинами в противоположную сторону. При достижении пластинами второго крайнего положения снова вырабатывается импульс Upee и с вы
10
15
2Q
2535 30
40
4550 55хода индикатора 17 диапазона на третий вход экстремального оптимизатора 12 поступает сигнал, сигнализирующий о прохождении пластинами всего диапазона. Поскольку к этому времени устройством был проанализирован весь диапазон возможных Dp и определено минимальное на этом диапазоне значение дисперсии Dp min, теперь необходимо установить пластины в положение, соответствующее минимальному шуму. Экстремальный оптимизатор 12 по приходу сигнала с индикатора 17 диапазона начинает сравнивать текущее значение дисперсии Dp с Dp min, вырабатывая на выходе сигнал I:
J1. Dp D р mjn/ел
1 0, Dp D р mmw
и при I 1 выключает посредством блока 13 управления электродвигатель 14. Таким образом шумопоглощающие пластины в блоке 7 устанавливаются в положении, когда звуковой шум в рабочем участке минимален для заданных значений средней скорости / и звуковой частоты f3B. в потоке.
Связь второго выхода блока 10 и второго входа экстремального оптимизатора 12 спужит для очистки памяти экстремального оптимизатора.
Формула изобретения
Устройство Для динамической градуировки датчиков параметров газовых потоков, содержащее рабочий участок в виде проточного канала, конфузор которого соединен через заглушенную камеру, и подключенный к задатчику скорости вентилятор с диффузором, перед которым установлен источник звуковых колебаний, акустически согласованный с рабочим участком и подключенный к генератору гармонических колебаний, датчик звукового давления, установленный в рабочем участке, отличающееся тем, что, с целью повышения точности и производительности процесса градуировки, в него введены цилиндрический шумопоглотитель с блоком управления, экстремальный оптимизатор, вычислитель дисперсии, блок оптимизации периода осреднения, блок вычисления периодов, при этом выходы задатчика скорости и генератора гармонических колебаний подключены соответственно к первым и вторым входам блока вычисления периодов и блока оптимизации периода осреднения, выходы блока вычисления периодов соединены соответственно с третьим и четвертыми входами блока оптимизации периода осреднения, первый выход которого соединен с первым входом вычислителя дисперсии и первым управляющим входом блока управления шумопоглотителем, второй - с вторым входом экстремального оптимизатора и вторым управляющим входом блока управления шумопоглотителем, датчик звукового давления через вычислитель дисперсии подключен к первому входу экстремального оптимизатора, информационный выход блока управления шумопоглотителем подключен к третьему входу экстремального оптимизатора, выход которого связан с третьим управляющим входом
блока управления шумопоглотителем, причем заглушенная камера выполнена цилиндрической, а ее боковые стенки покрыты звукопоглощающим материалом, передняя по потоку стенка выполнена в виде гофрированной плиты с квадратными отверстиями, кромки которых скошены со стороны рабочего участка под углом 40-60°.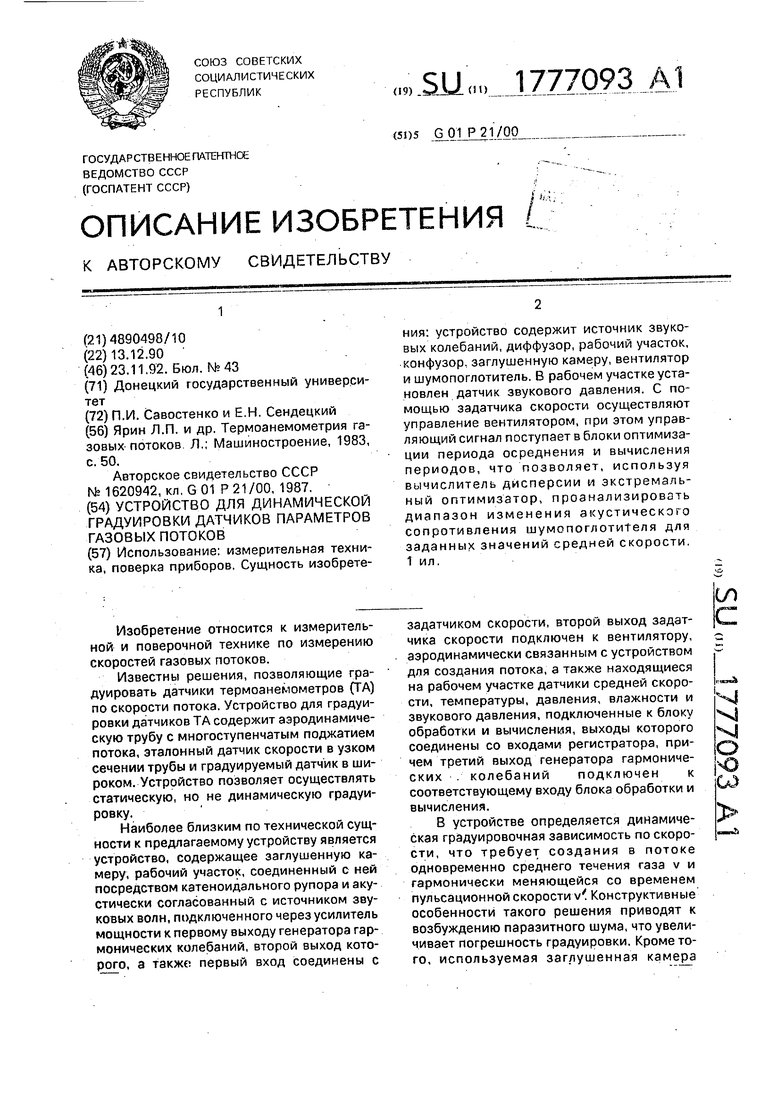


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической градуировки датчиков параметров газовых потоков | 1990 |
|
SU1767444A1 |
| Способ динамический градуировки датчиков термоанемометров и устройство для его осуществления | 1987 |
|
SU1620942A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Способ управления прядильной машиной и устройство для его осуществления | 1980 |
|
SU1030432A1 |
| Способ управления технологическим процессом и устройство для его осуществления | 1978 |
|
SU1110843A1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| Устройство для экстремального регулирования | 1979 |
|
SU860000A1 |
| Устройство для градуировки электроакустических преобразователей | 2020 |
|
RU2782354C2 |
| Устройство для управления прядильной машиной | 1982 |
|
SU1108151A1 |

Использование: измерительная техника, поверка приборов. Сущность изобретения: устройство содержит источник звуковых колебаний, диффузор, рабочий участок, конфузор. заглушенную камеру, вентилятор и шумопоглотитель. В рабочем участке установлен датчик звукового давления. С помощью задатчика скорости осуществляют управление вентилятором, при этом управляющий сигнал поступает в блоки оптимизации периода осреднения и вычисления периодов, что позволяет, используя вычислитель дисперсии и экстремальный оптимизатор, проанализировать диапазон изменения акустического сопротивления шумопоглотителя для заданных значений средней скорости. 1 ил.
| Ярин Л.П | |||
| и др | |||
| Термоанемометрия газовых потоков Л.; Машиностроение, 1983, с | |||
| ВО | |||
| Способ динамический градуировки датчиков термоанемометров и устройство для его осуществления | 1987 |
|
SU1620942A1 |
