первый вход средства формирования показателя качества соединен с выходом измерительного датчика, а второй - с задающим в;ходом регулятора выходного параметра, задатчик пределов измерения показателя качества подсоединен к оптимизатору, а выход регулятора управляющего воздействия соединен с управляющим входом корректирующего блока.
4, Устройство по п, 3, о т л ичающееся тем, что оптимизатор выполнен в виде экстремального регулятора с выходами сброса и реверса, формирующего устройства, двух ключей и сумматора, первый вход которого соединен с основным выходом экстремального регулятора через последова.тельно соединенные формирующее средство и первый ключ, а второй-непосредственно, при этом выход формирующего средства подключен чере.з второй ключ к входу сброса эк--тремального регулятора, а выход реверса экстремального регулятора - к управляющим входам обоих ключей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЛЕЙНЫХ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ | 1972 |
|
SU330428A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОНВЕКТИВНОЙ СУШКИ | 1984 |
|
SU1245028A1 |
| Система дискретного управления технологическим процессом | 1979 |
|
SU875389A1 |
| Способ автоматического управления работой измельчительного агрегата замкнутого цикла и система для его осуществления | 1986 |
|
SU1411030A1 |
| Устройство для автоматического регулирования технологического параметра,преимущественно влажности бумажного полотна | 1986 |
|
SU1416582A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ТЕХНОЛОГИЧЕСКОГО АГРЕГАТА | 1989 |
|
RU2011210C1 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Система управления | 1981 |
|
SU996995A1 |
1. Способ.управления технологическим процессом путем поддержания выходного параметра технологического объекта на заданном уровне с помощью управляющего воздействия и коррекции управляющего воздействия, отличающийся тем, что, с целью повышения точности управления, выбирают оптимальный показатель качества, формируют сигнал, пропорциональный выбранному показателю качества, управления, задают пределы допустимых значений вариации выбранного показателя качества, изменяют параметр системы управления за время, не превьшающее время переходного процесса технологического объекта, оставляя показатель качества в заданных пределах, затем скачком, изменяют параметр системы управления до значения, достаточного для перехода системы управления в неустойчивое состояние , и вьиерживают систему управления в этом состояНИИ.в течение времени, обеспечивающего ее устойчивое; состояние, затем скачком возвращают, параметр системы управления к первоначаль ному значению, при этом осуществляют изменение параметра системы управления до тех пор, пока показатель качества управления технологическим процессом не достигнет экстремального значения, после чего запоминают и фиксируют найденное значение параметра системы управления, соответствующее экстремальному значению показателя качества, затем осуществляют слежение за изменением экстремального значения, а при выходе показателя качества за установленные пределы отклонения от экстремального значения корректируют параметр системы управления. 2. Способ по п. 1,отличающ и и с я тем, что в качестве показателя качества выбирают дисперсию отклонения выходного параметра технологического объекта от заданного значения. 3. Устройство для осуществления способа по пп. 1 и 2, содержащее регулятор выходного параметра техно00 4; логического объекта с управляющим и задающим входами, измерительный датСО чик этого выходного параметра и последовательно соединенные блок аддитив кого параметрического центрирования и корректирующий блок, подключенные к выходу измерительного датчика и управляющему входу регулятора выходного параметра, отличающеес я тем, что оно имеет задатчик пределов изменения показателя качества и последовательио соединенные средство формирования показателя качества, оптимизатор и регулятор управляющего воздействия, причем
1
Изобретение относится к целлюлозно-бумажной промышленности и может быть использовано для управления непрерывными и непрерывно-дискретным процессами.
Известен способ управления технологическим процессом путем поддержания выходного параметра на заданном уровне с помощью управляющего воздей ствия и коррекции управляющего воздействия.
Известно также устройство, содержащее регулятор выходного параметра технологического объекта с управляющим и задающим выходами, измерительнь1й датчик этого выхрдною параметра и последовательно соединенные блок аддитивного параметрического центрирования и корректирующий блок, подключенные к выходу измерительного . датчика и управляющему входу регулятора выходного параметра fl 3Однако в этом способе не учитывается то, что динамические параметры объекта управления изменяются во времени, возмущения обычно имеют нестационарный характер, в объекте присутствуют большие транспортные запаздывания, что снижает точность управления.
Целью изобретения является повышение точности управления.-
Поставленная цель достигается тем, что согласно способу управления технологическим процессом путем поддержания выходного параметра объекта на заданном уровне с помощью управляющего воздействия и коррекции
управляющего воздействия, выбирают оптимальный показатель качества, формируют сигнал, пропорциональный выбранному показателю качества уп5 равления, задают пределы допустимых значений вариации выбранного показателя качества, изменяют параметр системы управления за время, не превышающее время переходного процесса
10 технологического объекта, оставляя показатель качества в заданных пределах, затем скачком изменяют параметр системы управления до значения, достаточного для перевода
J5 системы в неустойчивое состояние, и вьщерживают систему управления в этом состоянии в течении времени, обеспечивающего eie устойчивое состояние, затем скачком возвращают пара20 метр системы управления к первонач)апьному значению, при этом осуществляют изменение параметра системы управления до тех пор, пока показатель качества управления технологи25 ческим процессом не достигнет экстремального значения, после чего запоминают и фиксируют найденное значени параметра системы управления, соответствующее экстремальному значению
j-ji показателя качества, затем осуществляиот слежение за изменением экстремального значения, а при выходе показателя качества за установленные пределы отклонения ot экстремального значения корректируют параметр
35 системы управления.
Кроме ТОГО, в качестве показателя качества выбирают дисперсию отклонения выходного параметра технологического j6beKTa от заданного значения.
Устройство-.для реализации способа содержащее регулятор выходного параметра технологического объ1екта с управляющим и задающим входами- измерительный датчик этЬго выходного параметра и последовательно соединенные блок аддитивного параметри еского центрирования и корректирующий -блок, подключенные, к выходу измерительного датчика ц управляющему входу регулятора выходного параметра, имеет задатчик пределов изменения показателя качества и пог следовательно соединенные устройство формирования показателя качества, оптимизатор и регулятор управляюцего воздействия, причем первый вход средства формирования показателя качества соединен с выходом измерительного датчика, а второй - с задающим входом регулятора выходного параметра, задатчик пределов изменения показателя качества подсоединен к оптимизатору, а выход регулятора управляющего воздействия соединен с управляющим входом корректирующего блока.
Кроме того, оптимизатор выполнен в виде экстремального регулятора с выходами сбора и реверса, формирующе го устройства, двух ключей и сумматора, первый вход которого соединен с основным выходом экстремального регулятора через формирующее устройство и первый ключ, а второй - непосpeдcтвeннo при этом выход формирующего средстваподключен через второй ключ к входу сброса экстремального регулятора, а выход реверса экстремального регулятора - к управляющим входам обоих ключей.
Операции способа и режимы их выполнения позволяют непрерывно производить оптимизацию управления технологического объекта по выбранному показателю качества и трм самым повысить точность управления. Операции изменения величины параметра до значения, достаточного для перевода системы в неустойчивое состояние и вьщерживания системы в этом состоянии в течение времени, обеспечивающем устойчивое состояние системы, позволяют форсировать режим работы системы управления технологическим объектом и сделать
его независимым от параметров технлогического объекта.
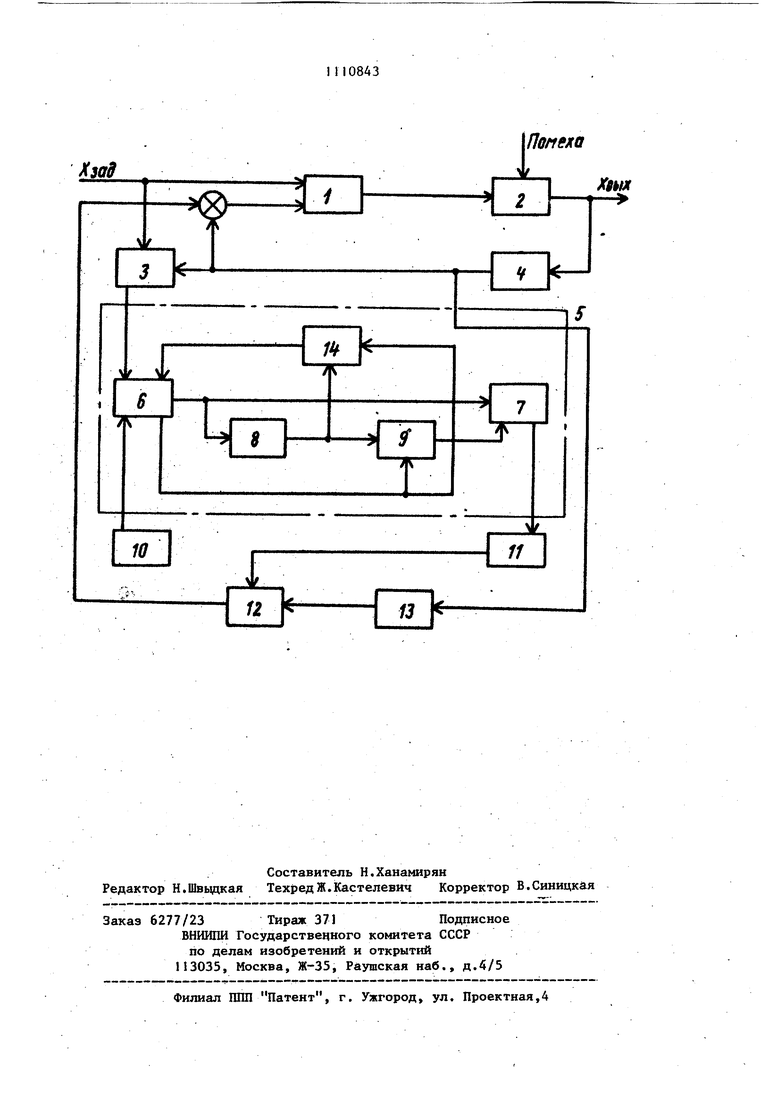
На ертеже изображена блок-скема предлагаемого устройства.
Устройство для реализации способа управления, технологическим процессом состоит из регулятора выходного параметра технологического объекта с управляющим и задающим входами 1, технологического объекта 2, устройства формирования показателя качества с двумя входами 3, измерительного датчика 4, огтимизатора 5, состоящеrd из экстремального, регулятора 6, сумматора 7, формирующего устройства 8, ключей 9,14, задатчика пределов изменения показателя качества 10, регулятора параметра системы 1i, корректирующего блока 12 и блока аддитивного параметрического центрироваНИН .13.
Регулятор выходного параметра технологического объекта с управляющим и задающим входами 1, технологический объект 2 и измерительный датчик 4 образуют замкнутую систему автоматического регулирования(САР} выбранного параметра технологического объекта и предназначены для поддержания выходного параметра объекта на заданном уровне. В частности, при реализации способа для управления техническим процессом производства бумаги технологическим объектом 2 является БДМ, в качестве регулятора 1 используют регулятор давления, формирующий, например, пропорционально-интегральный законСПи)регулирования, а в качестве измерительного датчика 4 - типовой измеритель влажности. .
Корректирующий блок 12 и блок аддитивного параметрического центрирования 13 соединены последовательно, причем вход блока аддитивного параметрического центрирования I3 подключен к выходу измерительного датчика 4, а выход корректирующего блока - к управляющему входу регулятора выходного параметра I. Эти блоки составляют корректирующую цепь предназначенную для коррекции управляющего воздействия с целью обеспечения инвариантности выходного параметра технологического объекта относительно помех.
Устройство формирования показателя качества 3, оптимизатор 5 и регулятор параметра системы I1 соединены последовательно и составляют депь подстройки параметра системы. Устройство формирования показателя качества подключено к задающему вход регулятора выходного параметра технологического объекта 1 и выходу Измерительного датчика 4. Выход регу лятора параметра системы 1 соединен с управляющим входом корректирующего блока 12. Оптимизатор 5 выполнен в виде экстремального-регулятора 6, формиру ющего устройства 8, ключей 9,14, сумматора 7 и предназначен для поиска параметра системы, соответствующего оптимсшьному режиму работы САР согласно выбранному показателю качества. В предлагаемом оптимизаторе первый вход сумматора 7 непосредственно соединен с основным выходом экстремального регулятора 6, а второй - через фбрмирующее устройство 8 и первый ключ 9, причем выход формирующего устройства 8 подключен через второй ключ к входу сброса экстремального регулятора 6, а выход реверса экстремального . регулятора 6 - к управляющему входу ключа 9. К экстремальному регулятор 6 подключен также задатчик пределов изменения показателя качества 10, который задает пределы изменения си йала экстремального регулятора 6 в зависимости от выбранных пределов изменения показателя качества. Способ реализуется следующим обр зом. Производят поддержание выходного параметра технологического объекта на заданном уровне с помощью управляющего воздействия. В качестве объекта регулирования могут быть использованы объекты целлюлознобумажной промьппленности, химической нефтеперерабатывающей и т.д. В качестве регулируемого выходного параметра в объект е, в частности, выбирается влажность бумажного поло на. САР влажности работает следующим образом. Сигнал, соответствующий заданном значению влажности Х,подают на вход регулятора параметра I, которы в соответствии с выбранным законом регулирования например пропорцийнальногинтегральным, осуществляет приближенную стабилизацию выходного параметра(влажности объекта 2 Х,, Влажность бумажного полотна измеряют с помощью измерительного датчика 4, Далее проводят коррекцию управляющего воздействия сигналом, зависимым от выходного параметра. Для этого с помощью блока аддитивного центрирования 13 производят обработку выходного сигнала измерительного датчика 4. Выделенный сигнал подают на вход корректирующего блока 12. Выходной сигнал корректирующего блока служит для коррекции основного управляющего воздействия. Однако из-заналичия нестационарных помех в технологическом объекте для изменения его параметров требуется проведение оптимизации работы корректирующего блока согласно некоторому показателю качества работы САР. В качестве показателя качества работы САР.выбирают дисперсию отклонения регулируемого параметра Xg;,, от заданного значения Х. или дисперсию ошибки системы регулирования D . Как показали эксперименты, эта функция обычно зависит от какого-либо параметра системы, например коэффициента усиления корректирующего блока 13. При нестационарных возмущениях,, действующих на объект, может иметь место дрейф-функции показателя качестваI) f(Ky) ,и искажение ее формы. Однако при этом унимодальный характер зависимости D4(K,j , сохраняет- , ся. Действие возмущений приводит к отклонению показателя качества от оптимального(экстремального)значения. Непрерывный поиск и поддержание Оптимального режима работы объекта, обеспечивающего экстремум функции показателя качества, осуществляют путем нахождения такого значения параметра системы К,,, при котором имеет место минимум дисперсии ошибки Для этого в устройстве-управления технологическим процессом на выходе устройства формирования показателя качества 3 формируют сигнал, пропорциональный выбранному показателю качества, и с помощьюЗадатчика пределов изменения показателя качества 10 задают пределы изменения этого параметра. Далее производят с помощью оптимизатора 5 и регулятора параметра системы 11 .выбор оптимального значения параметра системы, в частности коэффициента усиления К,, опт корректирующего блока 12. Для этого предварительно вырабатывают последоватег jHOCTb импульсных сигналов, каждый из KOTQpbix формирзпот таким образом, что CI зчала сигнал изменяет 6я в пределах допустимых вариаций значений выбранного показателя качества, затем его скачком увеличивают до величины, достаточной для перевода системы-управления в неустойчивое состояние, после чего по истечении промежутка времени, в тече ние которого в силу своей инерционности система может еще находится в устойчивом состоянии, также скачком изменяют до первоначального значения Такой сигнал получают с помощью оптимизатора 5. Оптимизатор ргбота т следующим образом. .Сигнал с выхода устройства формиРования показателя качества 3 поступает на вход экстремального регулято ра 6, на выходе которого вырабатывается непрерывный сигнал, поступающий одновременно на формирующее устройство 8 и сумматор 7. Как тольк сигнал на входе формирующего устройства 8 достигает велнчины порога срабатывания вырабатываются прямоугольные импульсы заданной амплитуды и длительности. Поскольку в первона|чальном положении ключ 9 открыт, то выходной сигнал формирующего, устройства поступает на вход сумматора 7, где он суммнруется с сигналом, вырабатывающимся . экстремальным регулятором 6. Одновременно с окончанием формирования прямоугольного импульса на вход сброса интегратора экстремального регулятора через нормально открытый ключ 14 подается сигнал на приведение выходного сигнала экстремального- регулятора 6 в исходное состояние. По прохождении экстремума экстремальный регулятор 6 с выхода реверса формирует- сигнал, закрывающий ключи 9 и 14, запоминает экстремальный уровень и осуществляет изменения сигнала около запомненного экстремального уровня. Таким образом, согласно предлагаемому способу изменяют параметр системы за время, не превышающее времени переходного процесса технологического объекта, .оставляя) показатель качества в заданных пределах. Динамические свойства КДМ во время работы меняются во времени. Реально диапазон изменения постоянной времени объекта колеблется в пределах 100 - 20 с. Предлагаемьвй способ эффективен и при динамических изменениях параметров объекта. Запаздывание объекта составляет 100 с. Использование предлагаемого способа оптимального управления обеспечивает по сравнению с существующими возможность повьппения точности управления технологическим процессом в условиях быстрого изменения динамических характеристик этих процессов и нестационариости возмущающих действий. Это позволяет повысить качество технологического процесса, уменьшить затраты производства.
nofiexa
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для регулирования влажности | 1974 |
|
SU465624A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
