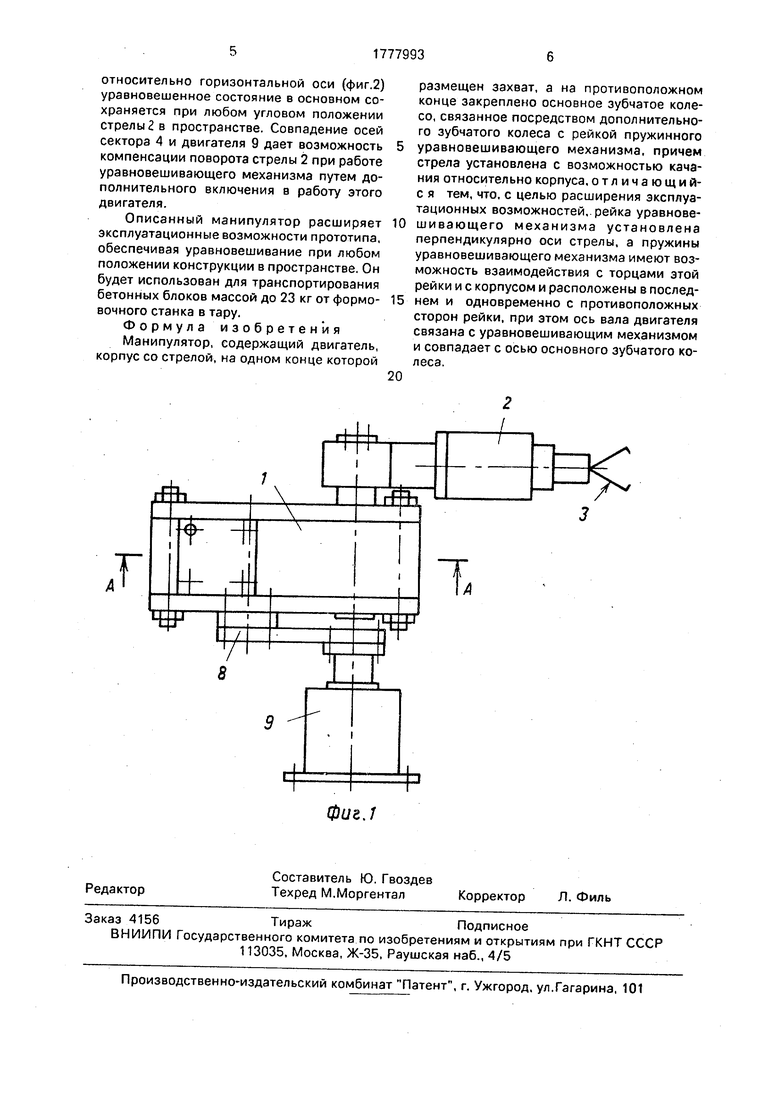
Фиг. 2
Изобретение относится к манипуляторам для механизации подъемно-транспортных операций, более конкретно - к конструкциям манипуляторов, обеспечивающим автоматическое поддержание уравновешенного состояния стрелы при изменении нагрузки.
Известен манипулятор, в котором для поддержания уравновешенного состояния при изменении нагрузки применена система зубчато-реечных передач. Недостатком такой конструкции является ее сложность.
Известен манипулятор, содержащий корпус с размещенной на нем стрелой, кинематически связанной с уравновешивающим механизмом посредством зубчато-реечной передачи. Эта передача выполнена в виде основного зубчатого колеса, жестко связанного со стрелой, дополнительного колеса и рейки, на конце которой выполнен наклонный участок.
Уравновешивающий механизм содержит пружину, размещенную в стакане, закрепленном на свободном конце стрелы, и толкатель, взаимодействующий с пружиной и с наклонным участком рейки.
Описанный манипулятор обеспечивает уравновешивание стрелы как при изменении ее длины, так и при изменении нагрузки в захвате, однако его эффективность падает при повороте всей конструкции вокруг оси основного зубчатого колеса. Если угол поворота составит 180° (стрела расположена вверху, а рейка - внизу), устройство полностью неработоспособно, т.к. уравновешивания не происходит.
Цель изобретения - расширение эксплуатационных возможностей манипулятора путем сохранения уравновешивания при повороте .вокруг оси основного зубчатого колеса на любой угол.
С этой целью в манипуляторе, содержащем корпус с приводным двигателем и стрелу, на одном конце которой размещен захват, а на противоположном конце закреплено основное зубчатое колесо, связанное посредством дополнительного колеса с рейкой пружинного уравновешивающего механизма, причем стрела установлена с возможностью качания относительно корпуса, рейка установлена перпендику- лйрно оси стрелы, а пружины, взаимодействующие с торцами реек и корпусом, расположены в корпусе и по противоположным сторонам рейки, при этом ось вала приводного двигателя, на котором закреплен уравновешивающий механизм, совпадает с осью основного зубчатого колеса.
На фиг. 1 показан общий вид манипулятора, вид сверху; на фиг. 2 - разрез А-А на фиг.1.
Манипулятор содержит корпус 1, на котором с возможностью качания установлена стрела 2, выполненная в виде телескопического силового цилиндра, с захватом 3. На конце стрелы 2 жестко закреплен зубчатый сектор 4, выполняющий функции основного
0 зубчатого колеса. С этим сектором посредством дополнительного зубчатого колеса 5 кинематически связана рейка 6, установленная перпендикулярно оси стрелы 2. По торцам рейки 6 расположены пружины 7,
5 которые передают усилия, возникающие при перемещении рейки 6 , на корпус 1. Балка 8 жестко связывает корпус 1 и приводной моментный двигатель 9, сообщающий манипулятору полноповоротное
0 вращение вокруг оси, совпадающей с осью основного зубчатого колеса.
Манипулятор работает следующим образом.
При выдвижении штока силового ци5 линдра стрелы 2 или при приеме груза захватом 3 возникает неуравновешенный момент, вращающий стрелу 2 по часовой стрелке. В ту же сторону поворачивается и зубчатый сектор 4, в противоположную сто0 рону - дополнительное зубчатое колесо 5, а рейка 6 движется вниз, сжимая нижнюю пружину 7. При этом появляется уравновешивающий момент, равный усилию пружины 7, помноженному на плечо этого усилия,
5 равное расстоянию от оси рейки 6 до оси зубчатого сектора 4. Ввиду того, что неуравновешенный момент прямо пропорционален нагрузке в захвате 4, а также длине стрелы 2, а характеристика пружин 7 линей0 на, при небольших углах качания стрелы 2 относительно корпуса 1 путем подбора параметров зацепления и пружин можно добиться в целом уравновешенного состояния при различных нагрузках в захвате 3 и при
5 изменении длины стрелы 2. При этом каждому значению неуравновешенного момента соответствует свое угловое положение стрелы 2 относительно корпуса 1.
При работе моментного двигателя 9
0 происходит поворот манипулятора вокруг оси, совпадающей с осью зубчатого сектора 4. В этом случае неуравновешенный момент, изменяясь по синусоидальному закону, уменьшается, а в вертикальном
5 положении стрелы 2 - исчезает. При приближении к горизонтальному положению стрелы этот момент вновь возрастает, а когда стрела 2 поворачивается захватом 3 влево, в работу вступает противоположная пружина 7. Ввиду симметрии конструкции
относительно горизонтальной оси (фиг.2) уравновешенное состояние в основном сохраняется при любом угловом положении стрелы 2. в пространстве. Совпадение осей сектора 4 и двигателя 9 дает возможность компенсации поворота стрелы 2 при работе уравновешивающего механизма путем дополнительного включения в работу этого двигателя.
Описанный манипулятор расширяет эксплуатационные возможности прототипа, обеспечивая уравновешивание при любом положении конструкции в пространстве. Он будет использован для транспортирования бетонных блоков массой до 23 кг от формовочного станка в тару.
Формула изобретения Манипулятор, содержащий двигатель, корпус со стрелой, на одном конце которой
0
размещен захват, а на противоположном конце закреплено основное зубчатое колесо, связанное посредством дополнительного зубчатого колеса с рейкой пружинного уравновешивающего механизма, причем стрела установлена с возможностью качания относительно корпуса, отличающий- с я тем, что, с целью расширения эксплуатационных возможностей, рейка уравновешивающего механизма установлена перпендикулярно оси стрелы, а пружины уравновешивающего механизма имеют возможность взаимодействия с торцами этой рейки и с корпусом и расположены в последнем и одновременно с противоположных сторон рейки, при этом ось вала двигателя связана с уравновешивающим механизмом и совпадает с осью основного зубчатого колеса.
20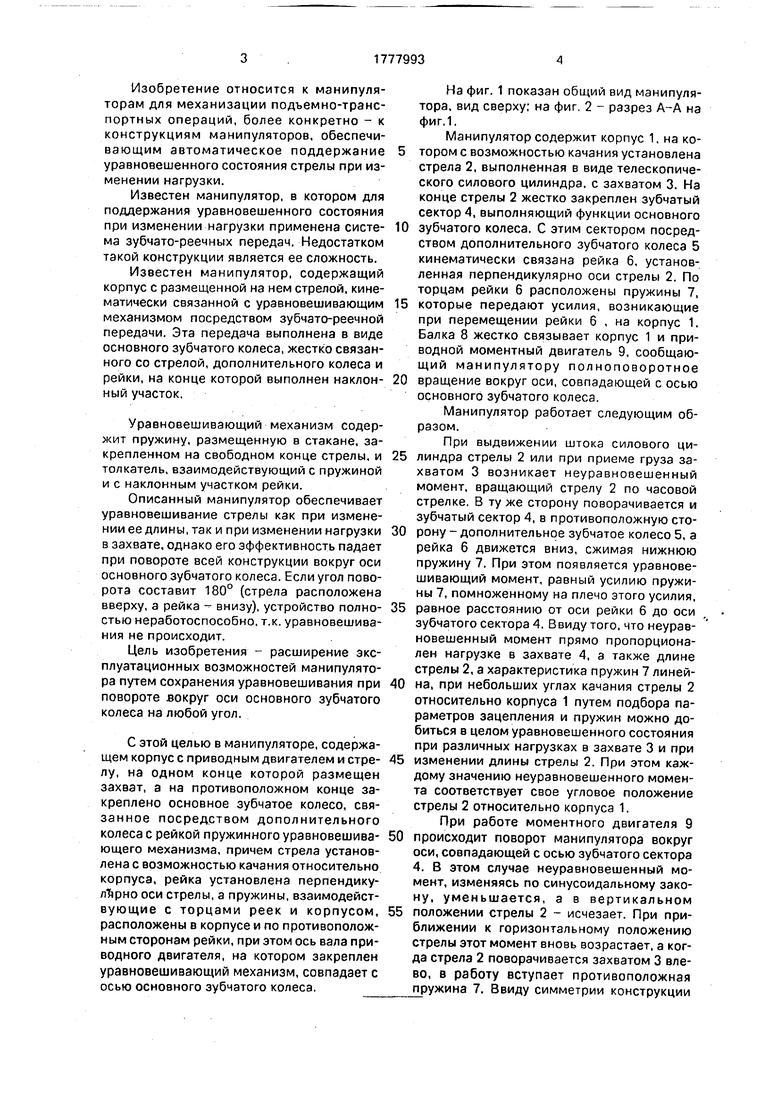
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1393618A1 |
| Манипулятор | 1985 |
|
SU1308463A1 |
| Уравновешенный манипулятор | 1987 |
|
SU1491698A1 |
| Манипулятор | 1983 |
|
SU1106652A1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| Кисть манипулятора | 1981 |
|
SU982902A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| ОБЪЕМНАЯ МАШИНА САВИНА | 1992 |
|
RU2016240C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2010 |
|
RU2471099C2 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ЖЕСТКИХ РОТОРОВ С МОМЕНТНО-НЕУРАВНОВЕШЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ЭЛЕМЕНТАМИ | 2001 |
|
RU2183824C1 |
Использование: для механизации подъемно-транспортных операций с целью уравновешивания стрелы при изменении нагрузки. Стрела 2 переменной длины связана посредством основного зубчатого колеса 4 и дополнительного зубчатого колеса 5 с рамкой 6, установленной перпендикулярно оси этой стрелы. По торцам рейки 6 расположены пружины 7 уравновешивающего механизма, взаимодействующие с корпусом 1 манипулятора и с торцами этой рейки, при этом ось двигателя совпадает с осью основного зубчатого колеса 4, выполненного в виде зубчатого сектора. 2 ил.
| Манипулятор | 1986 |
|
SU1393618A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
