KV XXNXXVyNXSS
4
00
со
СО
а
00
/Изобретение относится к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции, более конкретно к конструкциям манипуляторов, автоматически поддерживающим уравновешенное состояние стрелы при изменении нагрузки.
Целью изобретения является улучшение динамических характеристик манипу лятора за счет обеспечения автоматического уравновешивания массы подвижных частей манипулятора и груза.
На чертеже изображена конструкция манипулятора, разрез.
Манипулятор содержит корпус 1, в котором с возможностью качания вокруг горизонтальной оси установлена стрела 2. На последней закреплен силовой цилиндр 3, являющийся приводом выдвижения схвата А, закрепленного на штоке 5 зтого цилиндра. Стрела 2 кинема- I
тически связана с уравновешиваюш 1м механизмом посредством зубчато-реечной передачи и жестко связана с основным зубчатым колесом 6 этой передачи, закрепленным на горизонтальной оси. С основным зубчатым колесом 6 связано дополнительное зубчатое колесо 7. Штанга 8, установленная в направляю- пщх отверстиях корпуса 1, имеет рейку 9 этой зубчато-реечной передачи, находящуюся в зацеплении с ее дополнительным зубчатьм колесом 7. Кроме того, штанга В имеет наклонный участок 10. Уравновешивающий механизм выполнен в виде пру:жины 11, установленной в стакане 12, закрепленном на свободном конце стрелы 2, противоположном схвату 4, при этом верхний конец пружины 11 через толкатель 13 вза имодействует с наклонным участком 10 штанги 8.
С целью гашения колебаний, могущих иметь место при работе механизмов, между стаканом 12 и толкателем 13 желательна установка демпфирующего устройства (не показано).
Манипулятор работает следующим образом.
При выдвижении штока 5 силового цилиндра 3 или при приеме груза схва- том 4 возникает неуравновешенный момент, вращающий стрелу 2 по часовой стрелке. При этом в ту же сторону поворачивается и основное зубчатое колесо 6, а дополнительное зубчатое колесо 7 вращается в противоположную
O
5
0
5
0
5
0
5
0
5
сторону, штанга 8 и рейка 9 движутся влево, и наклонный ее участок 10 давит на пружину 11, сжимая ее и увеличивая парирующий момент на стреле 2, направлеиньй в сторону, противоположную неуравновешенному моменту. В связи с тем, что неуравновешенный момент прямо пропорционален нагрузке, удерживаемой схватом 4, а также плечу мо- мента (.расстоянию между центром тяжести груза и осью поворота стрелы 2), а характеристика цилиндрической пружины линейна и наклонный участок стрелы также прямолинеен, путем подбора параметров зубчатой передачи, жесткости пружины и угла наклона участка 10 можно добиться в общем уравновешенного состояния в сравнительно широком диапазоне полезных нагрузок на схвате 4 и при работе привода 3, когда длина стрелы изменяется.
При возврашении штока 5 в исходное положение или уменьшении нагрузки в схвате 4 дестабилирующий момент поворачивает стрелу 2 против часовой стрелки, при этом зубчатые колеса 6 и 7 поворачиваются соответственно против и по часовой стрелке, рейка 9 смещается вправо, что приводит к удлинению пружины 11 и уменьшению парирующего момента на противоположном схвату 4 конце стрелы 2.
Предлагаемый манипулятор обеспечивает поддержание уравновешенного состояния в широком диапазоне нагрузок и длин стрелы, имея более простую конструкцию.
Формула изобретения
Манипулятор, содержащий корпус с размещенной в нем стрелой, кинематически связанной с уравновеш1явающим механизмом посредством зубчато-реечной передачи, основное зубчатое колесо которой закреплено на горизонтальной оси, а рейка выполнена на штанге, установленной в направляющи: корпуса параллельно стреле, на одном конце которой установлен схват с приводом его выдвижения, отличающий- с я тем, что, с целью улучшения динамических характеристик манипулятора, стрела жестко связана с основным зубчатым колесом, установленным с возможностью качания относительно корпуса на горизонтальной оси и связанным посредством дополнит1гльного зубчатого колеса с рейкой зубчато313936184
реечной передачи, штанга которой име- крепленном на свободном конце стрелы, ет наклонный участок, при этом урав- толкателе, установленном с возмож- новешивающий механизм выполнен в виде ностью взаимодействия с наклонным пружины, размещенной в стакане, за- у.частком штанги.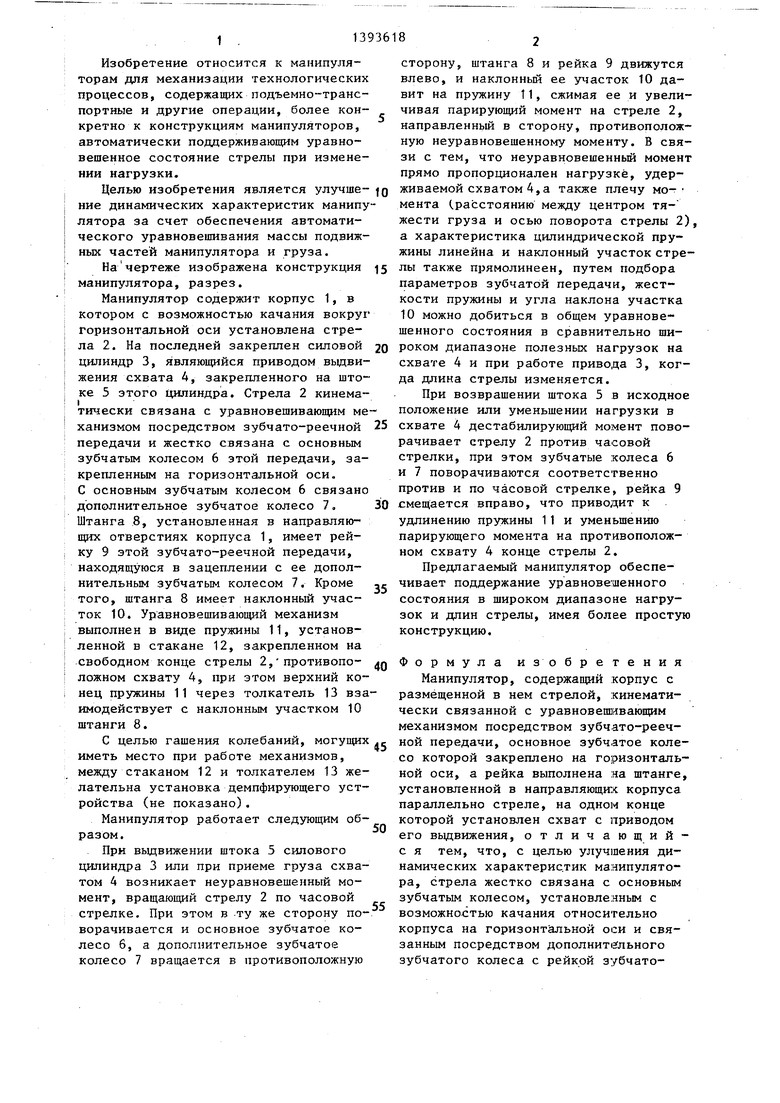
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1990 |
|
SU1777993A1 |
| Манипулятор | 1985 |
|
SU1308463A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Уравновешенный манипулятор | 1987 |
|
SU1491698A1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Манипулятор | 1986 |
|
SU1371895A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
Изобретение относится к манипуляторам для механизации технологических процессов, включающих подъемно-транспортные и другие операции, а более конкретно к конструкциям манипуляторов, автоматически поддерживающим уравновешенное состояние стрелы при изменении нагрузки. Целью изобретения является улучшение динамических характеристик манипулятора за счет обеспечения автоматического уравнове- пшвания массы подвижньк частей манипулятора и груза. Для этого стрела 2 манипулятора установлена в корпусе 1 с возможностью качания вокруг горизонтальней оси. Стрела 2 имеет на одном своем конце силовой цилиндр и схват и кинематически связана с уравновешивающим механизмом посредством, зубчато-реечй ой передачи. Штанга 8 этой передачи имеет наклонный участок 10. Уравновешивающий механизм выполнен в виде пружины 11, установленной в стакане 12 и толкателе 13. Стакан 12 закреплен на свободном конце стрелы 2, а толкатель установлен с вo. мoжнocтью взаимодействия с наклонным участком штанги. 1 ил. § (Л
| Манипулятор | 1985 |
|
SU1308463A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
