Изобретение относится к автоматическим устройствам, управляемым системами числового программного управления, используемым для нанесения лакокрасочных и защитных покрытий на поточных линиях и конвейерах. Известен манипулятор, содержащий основание, поворотную опору, шарнирно сочлененные и снабженные приводами качания плечо и предплечье, причем последнее выполнено в виде неравноплечего рычага, конец больщого плеча которого снабжен валом ,с инструментом, кинематически связанным с валом двигателя, расположенным на конце малого рычага 1. Недостатком известного манипулятора является неуравновещенность инструмента, что ухудшает статические и динамические характеристики привода качания инструмента в вертикальной плоскости. Цель изобретения - улучшение динамических характеристик и снижение энергоемкости привода качания инструмента. Указанная цель достигается тем, что манипулятор, содержащий основание, поворотную опору, шарнирно сочлененные и снабженные приводами качания плечо и предплечье, причем последнее выполнено в виде неравноплечего рычага, конец больщого плеча которого снабжен валом с инструментом, кинематически связанным с валом двигателя, расположенным на конце малого рычага, снабжен механизмом уравновешивания инструмента, выполненным в виде пружины, двух направляющих роликов, установленных на предплечье, и двух ЩКИБОВ, один из которых установлен на валу двигателя, а другой - на дополнительно введенной подвижной опоре, смонтированной на предплечье, а также гибкого элемента, огибающего указанные направляющие ролики и ujKHBbi, при этом на ведомом шкиве выполнен палец, соединенный концом с пружиной. На чертеже изображен предлагаемый манипулятор. Манипулятор содержит основание 1, в котором размещен механизм поворота (не показан) поворотной платформой 2, шарнирно сочлененной с приводом 3 качания плеча 4 и приводом 5 качания предплечья 6, в котором смонтирована пружина 7, вторы.м концом соел,иненная гибкой связью 8 через направляющие ролики 9 с пальцем 10 на смонтированном в подвижной опоре 11 ведомом шкиве 12, соединенном гибкой связью 13 через направляющие ролики 14 с ведущим шкивом 15, закрепленным на установленном в оси 16 валу 17, одним концом соединенном с двигателем 18, а другим - с одноступенчатым коническим зубчатым редуктором 19, на выходном валу которого смонтирован привод 20, выходным валом соединенный с инструментом 21. Манипулятор работает следующим образом. Для обеспечения горизонтального перемещения плеча 4 с предплечьем 6 механизм поворота, размещенный в основании 1, обеспечивает вращательное движение поворотной платформе 2, а шарнирно сочлененные с ней плечо 4 и его привод 3 качания обеспечивают возвратно-поступательное перемещение щарнирно -сочлененного с ними предплечья б, которое за счет привода 5 его качания может совершать пере.мещение в вертикальной плоскости смонтированного на нем инструмента 21. Уравновешивание плеча 4 и предплечья 6 осуществляется приводами, а обеспечение уравновещивания статического момента, создаваемого технологическим инструменто.м 21, осуществляется за счет пружины 7, одним концом соединенной с внутренней стенкой предплечья 6 а другим через гибкую связь 8 - с пальцем 10, эксцентрично смонтированным на ведомом щкиве 12. Перемещение в вертикальной плоскости инструмента 21 производится расположенным на коротком плече предплечья 6 двигателем 18, на выходном валу 17 которого между его опорой и одноступенчатым коническим зубчатым редуктором 19 смонтирован ведущий шкив 15. Пружина 7 при качании ведо.мого шкива 12 обеспечивает создание уравновешивающего момента относительно оси ведомого щкива 12. Последний относительно ведущего шкива i5 устанавливается таким образом, чтобы крайнее нижнее положение центра тяжести неуравновешенных .масс инстру.мента 2 и соединенных с ни.м коммуникацией, соответствовало максимальному удалению пальца 10 от места соединения конца пружины 7 с предплечье.т 6 и, следовательно, максимальному растяжению пружины 7. Гибкий элемент 8 в этом случае пересекает ось ведомого щкива 12 и момент от усилия пружины 7 равен нулю. С целью упрощения компоновки передаточное отнощение между ведомым 12 и ведущим 15 шкивами выбирается равным единице. В этом случае угол поворота ведомого шкива 12 равен углу поворота инструмента 21 в вертикальной плоскости. Таким образом, выбор параметров всей этой кинематической цепи позволит обеспечить закон изменения уравновешивающего момента, близкий к синусоидальному, т.е. инструмент 21 уравновешивается при любом ею положении в пределах, равных приблизительно 210°. Окрасочные манипуляторы снабжаются инструментом (распылителем) весом от 2,5 кг (для пневмораспыления краски) до 10 кг (для нанесения защитных покрытий). Соединяемые с ними коммуникации увеличивают вес перемещаемых масс еще соответственно на 1-1,5 кг.
В качестве привода качания инструмента используются в основном неполноповоротные гидродвигатели, а для перемещения распылителя вместе с коммуникациями (пневмогидрошлаги и управляющий кабель) при давлении в гидроприводе 5 МПа вес данного двигателя составляет 2,5-5 кг.
Размещение уравновешивающего механизма в предплечье непосредственно у оси, соединяющей плечо с предплечьем, увеличит статический момент относительно оси качания предплечья не более чем на 1-2°/о и не потребует увеличения мощности
механизма качания. Наличие уравновешивающего механизма позволит уменьшить объем, вес и стоимость гидродвигателя качания инструмента в вертикальной плоскост,
Применение предлагаемого манипулято
ра позволит повысить динамическую уравновешенность инструмента, упростить программное обеспечение системы управления, повысить точность позиционирования и качество окраски, особенно мелких деталей
сложного профиля, при окраске которых на конвейер еще применяется ручная подкраска.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1090546A1 |
| Манипулятор | 1991 |
|
SU1774914A3 |
| Манипулятор | 1990 |
|
SU1731624A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Рука манипулятора | 1979 |
|
SU874332A2 |
| Рука манипулятора | 1978 |
|
SU715317A1 |
| Устройство для раскладки нитей на движущейся подложке | 1978 |
|
SU861258A1 |
МАНИПУЛЯТОР, содержащий основание, поворотную опору, шарнирно сочлененные и снабженные приводами качания плечо и предплечье, причем последнее выполнено в виде неравноплечего рычага, конец большого плеча которого снабжен валом с инструментом, кинематически связанным с валом двигателя, расположенным на конце малого рычага, отличающийся тем, что, с целью улучшения динамических характеристик путем уравновешенивания инструмента, он снабжен механизмом уравно.вешивания инструмента, выполненным в виде пружины, двух направляющих роликов, установленных на предечье, и двух щкивов, один из которых установлен на валу двигателя, а другой - на дополнительно введенной подвижной опоре, смонтированной на предплечье, а также гибкого элемента, огибающего указанные направляющие ролики и щкивы, при этом на ведомом щкиве выполнен палец, соединенный концом с пружиной.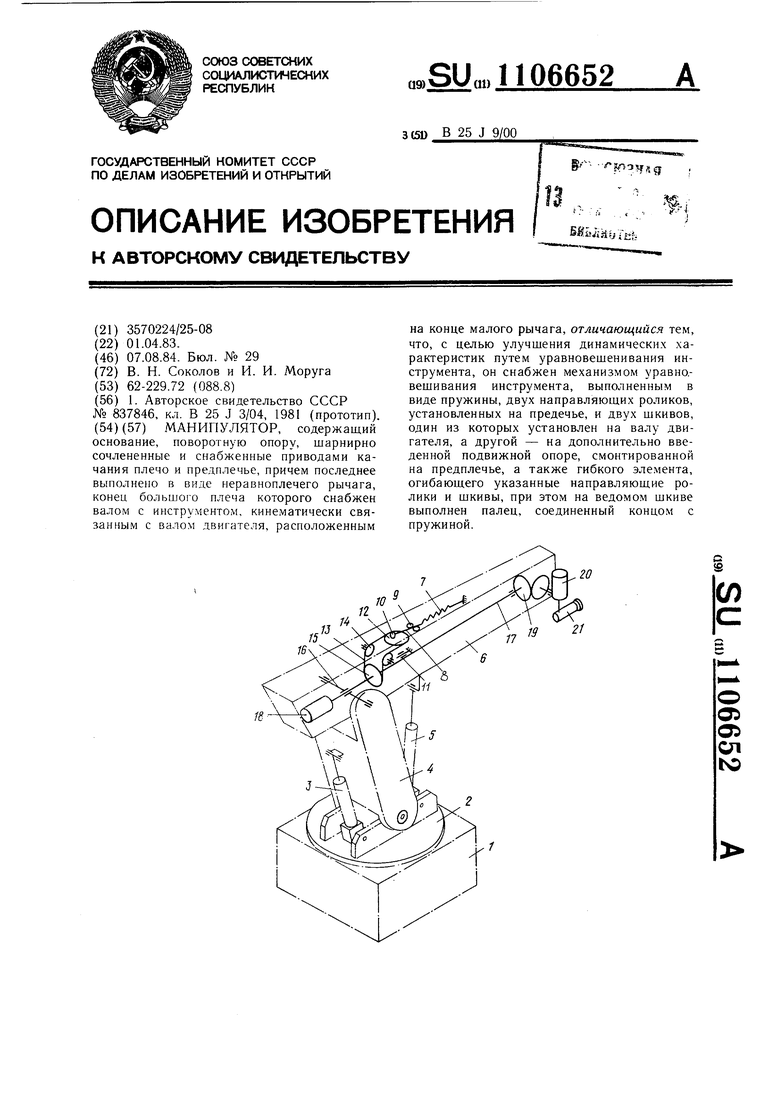
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Робот | 1979 |
|
SU837846A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
