(54) КИСТЬ МАНИПУЛЯТОРА
Изобретение относится к машиностроению, в частности к автоматическим манипуляторам.
Известна кисть манипулятора, содержащая вилку с осью, люльку, в корпусе которой установлены схват и приводи поворота люльки и ротации схвата 1 3.
.Недостатками известного устройства являются динамическая неуравновешенность люльки кисти относительно оси ее качания, что снижает точность позиционирования, а также значительный вес схвата и невозможность использования его при работе в агрессивной среде.
Целью изобретения является обеспечение динамического уравновешивания при.одновременном повышений точности позиционирования, а также уменьшение веса и обеспечение работы в агрессивной среде.
Указанная цель достигается тем, что привод качания люльки выполнен в виде двух гидроцилиндров, установленных симметрично относительно оси качания люльки, а блок управления расположен на противоположном относительно схвата, торце люльки, при2
чем детали кисти выполнены из титанового сплава.
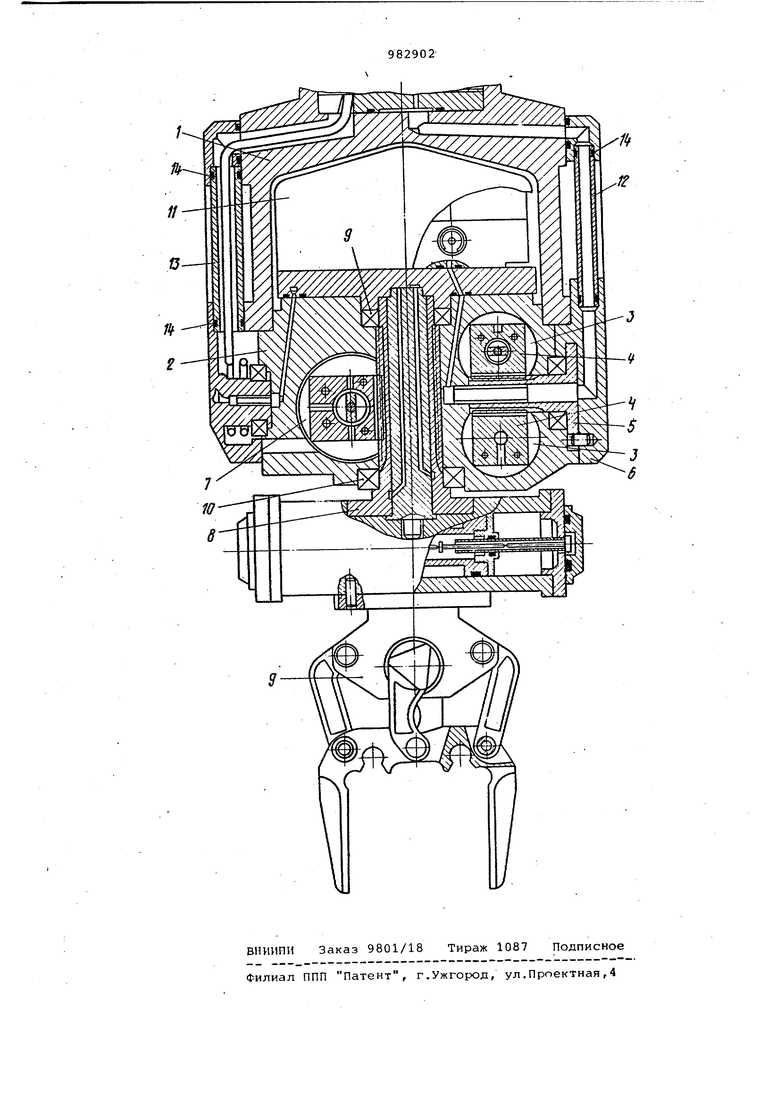
На чертеже показана конструк1(гивная схема кисти манипулятора.
Кисть манипулятора содержит вилку 1, корпус 2 люльки, внутри которого установлены два гндроцилиндра Зкачания схвата, реяки 4 которых взаимодействуют с цапфой 5, закрепtoленной при помощи крыики 6 в вилке. Гндроцилиндр 7 ротации схвата кинематически связан с зубчатой втулкой 8, к торцу которой крепится схват 9 и установлен в под аипниках 10 в
15 корпусе люльки. А на противоположном относительно схвата торце люльки установлен блок 11 управления.
Система подвода и слива рабочей жидкости выполнена в виде напорной
20 12 и сливной 13 трубок с уплотнениями 14.
Работа кисти осуществляется следукнцим образом.
При подаче команды перемещаются
25 поршни гидроцнлиндров 3 качания схвата 9. Так как рейки 4 взаимодействуют с зубчатой частью цапфы /5, неподвижно закрепленной при помощи крышки б в вилке 1, то схват 9 со30вершает движения качания. Вес блока 11 управления уравновешивает вес охвата 9, поэтому перепад давления на поршнях гидроцилиндров 3 Качания схвата пропорционален только моменту, создаваемому нагрузкой. Ротация схвата осув1ествляется путем перемещения рейки гидроцилиндра 7 ротахдзи схвата через зубчатую втулку 8. Такое расположение механизмов облегчает оператору работу с объектом так как обеспечивается динамическое уравновешивание кисти. Формула изобретения Кисть манипулятора, содержащая вилку с осью, люльку, в корпусе которой установлены схват и приводы качания люльки и ротации схвата, и блок управления, отличающаяся тем, что, с целью обеспечения динамического уравновешивания при одновременном повышении точности позиционирования, привод качания люльки выполнен в виде двух гидроцилиндров, установленных симметрично относительно оси качания люльки, а блок управления расположен на- противоположном относительно схвата торце люльки. Источники информации, принятые во внимание при экспертизе 1. Юревич Е.И. и др. Устройство промыишенных роботов, Л., Машиностроение , 1980, рис. 1.11, с. 36.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Шарнир манипулятора | 1984 |
|
SU1256959A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1986 |
|
SU1393618A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |