ная универсальность при выполнении широкого разнообразия строительных операций и относительная сложность конструкции.
Целью изобретения является упрощение конструкции и расширение технологических возможностей оборудования в условиях его унификации.
Указанная цель достигается тем, . мто в рабочем оборудовании гидравлического экскаватора, включающем рукоять, установленные на ней на мон тажном пальце соосно две челюсти и гидроцилиндры управления, одна из челюстей выполнена в виде сменного модуля и выполнена в верхней части в виде полого корпуса, установленного с возможностью неподвижного крепления ее монтажным пальцем к рукояти, вторая челюсть соединена с гидроци- линд.ром управления, имеет установленный соосно монтажному пальцу цилиндрический барабан с продольным пазом, при этом рукоять снабжена на- правляющей втулкой, установленным в ней фиксатором и соединенным с ним штоком гидроцилиндром одностороннего действия, а фиксатор размещен с возможностью установки его в продольном пазу цилиндрического барабана при смыкании челюстей. Штоковая полость гидроцилиндра одностороннего действия сообщена со штоковой полостью гидроцилиндра управления челюстью.
Сопоставительный анализ с прототипом показывает, что заявляемое рабочее оборудование гидравлического экс
10
15
257782 54
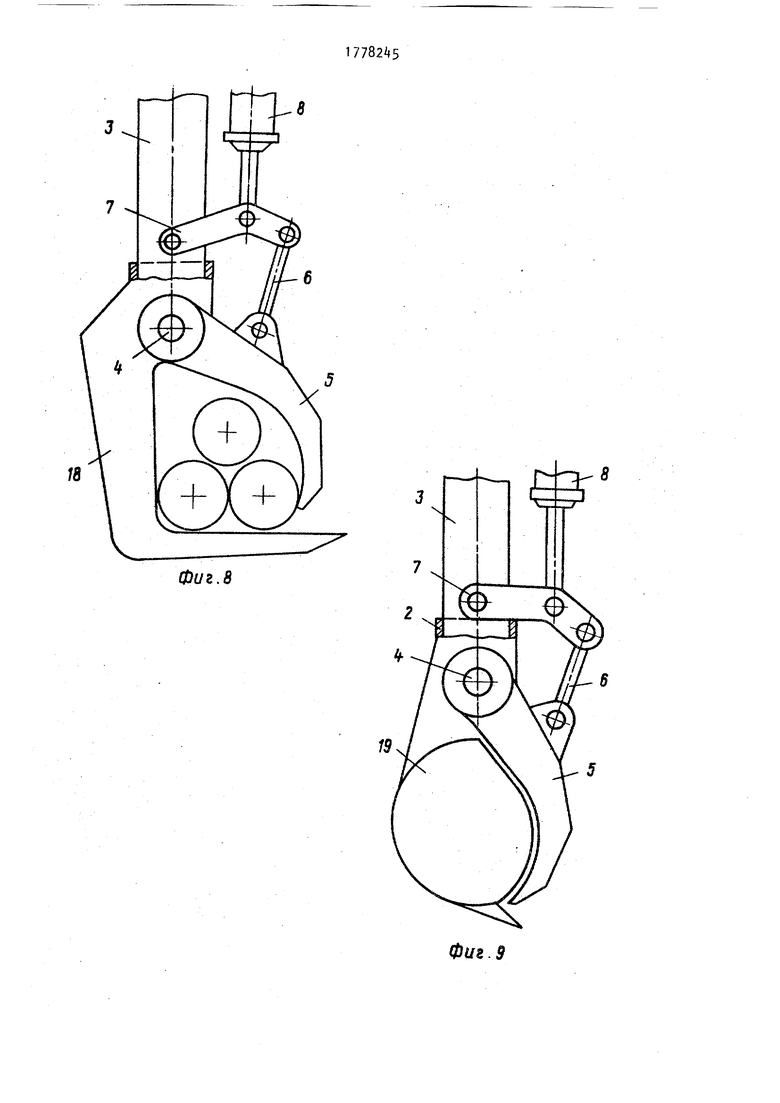
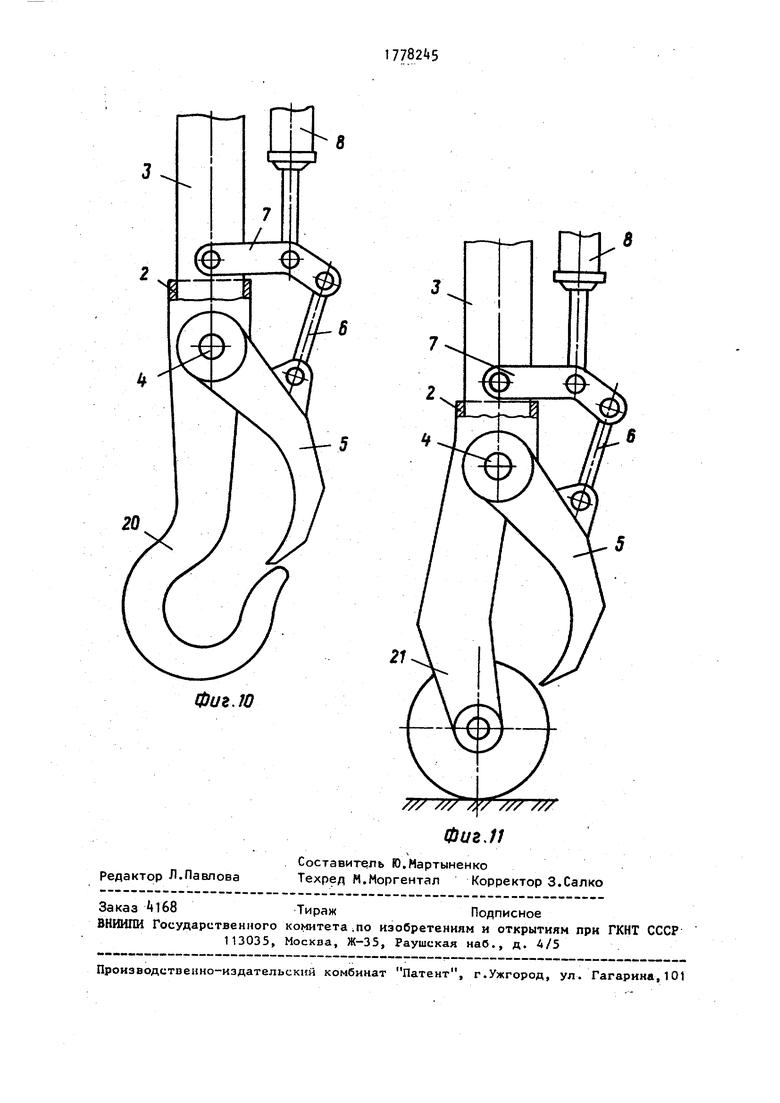
На фиг. 1 показан общий вид рабочего оборудования гидравлического экскаватора; на фиг. 2 - вид А на е фиг.1, на фиг. 3 - вид Б на фиг.11, на фиг. 1 показан процесс захвата труб на фиг. 5 - процесс захвата бордюда; на фиг. 6 - процесс захвата тротуарной плитки , на фиг.7 -процесс разборки завалов} на фиг.8 - процесс захвата пакета длинномерных предметов, на фиг.9 - процесс грейферного черпания мелкокусковых материалов на фиг.10 - захват грузов посредством крюковой подвески $ на фиг. 11 - процесс укатки основания.
Рабочее оборудование гидравлического экскаватора (фиг.1) включает иелюсть 1,выполненную в вире сменно- : го модуля и выполненную в верхней части в виде полого корпуса 2, установленного с возможностью неподвижного крепления ее к рукояти 3 монтажным пальцем 4. Соосно монтажному пальцу А шарнирно закреплена поворот- ная челюсть 5, которая посредством тяги ,6 и двуплечего рычага 7 соединена с гидроцилидром управления 8. Соосно монтажному пальцу А на поворотной челюсти 5 неподвижно закреплен цилиндрический барабан 9 (фиг.21, на-. котором выполнен продольный паз 10 с возможностью взаимодействия при смыкании челюстей 1 и 5 с фиксатором 11, установленным в направляющей втулке 12, закрепленной на рукояти 3. Фиксатор 11 соединен со штоком гидроцилиндра одностороннего действия 13, установленного на рукояти 3. Што20
30
35



| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1323665A2 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| КОВШОВЫЙ ГИДРОЗАХВАТ ЭКСКАВАТОРА | 1992 |
|
RU2039159C1 |
| ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2365712C1 |
| Рабочее оборудование гидравли-чЕСКОй эКСКАВАциОННОй МАшиНы | 1978 |
|
SU831902A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2368734C1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1700150A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1661290A1 |
| Рабочее оборудование гидравлического экскаватора | 1982 |
|
SU1081291A1 |

Рабочее оборудование гидравлического экскаватора. Сущность изобретения: рабочее оборудование гидравлического экскаватора включает челюсть 1, выполненную в виде сменного модуля и оснащенную в верхней части полым корпусом 2 с возможностью не- , подвижного -крепления ее к рукояти 3 монтажным пальцем А. Соосно монтажному пальцу k шарнирно закреплена поворотная челюсть 5, которая тягой 6 и двуплечим рычагом 7 соединена с Изобретение относится к области землеройных машин, в частности к одноковшовым гидравлическим экскаваторам и предназначено для совершенствования их рабочего оборудования. Известно рабочее оборудование гидравлического экскаватора, включающее захват для перегрузочных операций, состоящий из двух гидроуправляемых челюстей и рычажного механизма для обеспечения синхронности поворота челюстей. гидроцилиндром управления 8. Соосно монтажному пальцу k на поворотной челюсти 5 неподвижно закреплен цилиндрический барабан. В нем выполнен продольный паз с возможностью взаимодействия при смыкании челюстей 1 и 5 с фиксатором, установленным в направляющей втулке, закрепленной на рукояти 3. Фиксатор соединен со штоком гидроцилиндра одностороннего действия, установленного на рукояти 3. Штоковая полость гидроцилиндра одностороннего действия сообщена со што- ковой полостью гидроцилиндра управления 8. Челюсть 1, как сменный модуль, может быть выполнена различного конструктивного вида: для захвата труб, для захвата бордюра, для извлечения и захвата тротуарной плитки, для разборки завалов, для захвата и транспортирования пакетов длинномерных предметов, для перемещения и погрузки мелкокусковых материалов, для выполнения погрузочно-разгрузочных операций со штучными грузами, для - укатки оснований. 1 з.п.ф-лы, 11 ил. Наиболее близким техническим решением является конструкция рабочего оборудования гидравлического экскаватора, содержащего две челюсти, шарнирно закрепленные на траверсе, установленной на рукояти, рычажный механизм для обеспечения синхронно го поворота челюстей, гидроцилиндр управления. Недостатком известных конструкций рабочего оборудования гидравлических экскаваторов является их недостаточё з 00 кэ Јь 1СЛ
каватора отличается неподвижным ковая полость гидроцилиндра одностолением одной из челюстей в виде сменного модуля монтажным пальцем к рукояти и наличием на второй челюсти цилиндрического барабана с продольным пазом, установленного COOCH.D пальцу д5 с возможностью взаимодействия с гид- роуправляемым фиксатором.
Таким образом, заявляемое рабочее оборудование гидравлического экскавароннего действия 13 сообщена со ковой полостью гидроцилиндра управления 8. В зависимости от вида выполняемых рабочих операций (фигЛ,5,6,7, 8, 9,10, 11) челюсть 1, как сменный модуль, может быть выполнена с определенной конфигурацией рабочей поверхности, а также различного конструктивного исполнения. Рабочая поверхность челюсти 1, как сменного модуля И, (фиг.) может быть выполнена с криволинейной рабочей поверхностью определенного радиуса кривизны для захвата цилиндрических предметов типа трубы, столбы, бревна. Для захвата бордюра рабочая поверхность сменного модуля 15 (фиг.5) выполнена адаптирующейся к геометрической форме бордюра, При выполнении операций
тора соответствует критерию изобретения новизна.
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии крите-- рию существенные отличия.
ковая полость гидроцилиндра односто
роннего действия 13 сообщена со ковой полостью гидроцилиндра управления 8. В зависимости от вида выполняемых рабочих операций (фигЛ,5,6,7, 8, 9,10, 11) челюсть 1, как сменный модуль, может быть выполнена с определенной конфигурацией рабочей поверхности, а также различного конструктивного исполнения. Рабочая поверхность челюсти 1, как сменного модуля И, (фиг.) может быть выполнена с криволинейной рабочей поверхностью определенного радиуса кривизны для захвата цилиндрических предметов типа трубы, столбы, бревна. Для захвата бордюра рабочая поверхность сменного модуля 15 (фиг.5) выполнена адаптирующейся к геометрической форме бордюра, При выполнении операций
5
по извлечению и захвату тротуарной плитки сменный модуль 16 (фиг.6) оснащен соответствующим профилем. При разборке завалов, возникающих в условиях реконструкции строительных объектов, в результате аварий, землетрясений или других стихийных бедствий сменный модуль 17 выполняется в виде зуба рыхлителя (фиг.7). В условиях осуществления операций п захвату и транспортированию пакетов длинномерных предметов (фиг.8) сменный модуль 18 может быть выполнен в виде вильчатого подхвата. Перемещение и погрузка мелкокусковых материалов может также осуществляться рабочим оборудованием в условиях установки сменного модуля 19 в виде полковша (фиг.9). Выполнение погрузочн разгрузочных операций со штучными грузами может быть достигнуто посредством рабочего оборудования гидравлического экскаватора сменным модулем 20 в виде крюковой подвески (фиг.10). Выполнение процессов укатки оснований может быть осуществлен путем использования сменного модуля в виде катка 21, наружная поверхнос которого может очищаться от налипше материала посредством поворотной челюсти 5 (фиг.11).
Работает оборудование следующим образом. Челюсть 1 устанавливается полым корпусом 2 на рукояти 3 и закрепляется неподвижно при помощи монтажного пальца 4. Поворотная челюсть 5 при помощи гидроцилиндра управления 8 и посредством тяги 6 и двуплечего рычага 7 поворачивается на монтажном пальце 4 относительно рукояти 3 и челюсти 1, осуществляя захват различных грузов и предметов Поскольку челюсть 1 выполнена в виде сменного модуля, то в зависимо сти от вида выполняемой операции устанавливаются различные типы челюстей: для захвата труб 14 (фиг.4); для захвата бордюра 15 (фиг.5){ для извлечения и захвата тротуарной пли ки 16 (фиг.6); для разборки завалов 17 (фиг.7) для захвата и транспортирования пакетов длинномерных предметов 18 (фиг.8)Ј для перемещения и погрузки мелкокусковых материалов 13 (фиг.ЭМ для выполнения погрузоч но-разгрузочных операций со штучными грузами 20 (фиг.10); для укатки оснований 21 (фиг.11).
0
5
0
5
0 челюсть
Захват грузов и материалов осуществляется путем прижатия поворотной челюсти S, управляемой гидроцилиндром 18, к челюсти 1, закрепленной неподвижно на рукояти 3. При этом каждая челюсть 1 в виде сменного модуля и поворотная челюсть 5 выполнены конструктивно таким образом, что при повороте поворотной челюсти 5 и захвате определенного груза цилиндрический барабан 9 располагается продольным газом 10 в плоскости перемещения фиксатора 11, который, перемещаясь в направляющей втулке 12 род действием пружины гидроцилиндра одностороннего действия 13, осуществляет стопорение цилиндрического барабана 9, а вместе с ним и поворотной челюсти 5. Таким образом, обеспечивается надежный захват груза челюстями 1 и 5 и посредством фиксатора 11, утопленного в продольный паз 10 цилиндрического барабана 9, достигается предохранение груза от самопроизвольного выпадания, в случае возможных утечек рабочей жидкости в гидросистеме экскаватора. Для освобождения груза поворотная
5 при помощи гидроцилиндра управления 8 поворачивается против часовой стрелки относительно монтажного пальца 4. При этом рабочая жидкость поступает вштоковую полость
5 гидроцилиндра управления 8 и одновременно в штоковую полость гидроцилиндра одностороннего действия 13, управляющего фиксатором 11. Фиксатор 11 выдвигается из продольного паза 10 цилиндрического барабана 9, обеспечивая возможность осуществления движения поворотной челюсти 5. Для исключения заклинивания фиксатора 11 его боковые поверхности, кон5 тактирующие с продольным пазом 10, выполнены наклонными,
Для установки различных сменных модулей 14, 15, 16, 17, 18, 19, 20, 21 необходимо демонтировать монтаж0 ный палец 4 и осуществить замену челюсти 1 на соответствующий модуль с последующей фиксацией его посредством монтажного пальца 4.
Рабочее оборудование гидравлического экскаватора обладает легкостью практической реализации, обеспечивает надежность выполнения операций по захвату и перемещению различного рода грузов и предметов. Кроме того,
0
5
рабочее оборудование благодаря наличию различных конструктивных решений сменных модулей может использоваться для выполнения различных технологических операций, чем достигается расширение области эффективного применения одноковшового гидравлического экскаватора. В частности, оборудование может быть использовано для реконструкции строительных объектов, для разборки завалов и сноса старых аварийных зданий и сооружений, Предлагаемое рабочее оборудование модет быть использовано в качестве сменного для укомплектования специальных машин для отрядов быстрого реагирования по ликвидации последствий аварий, землетрясений и других стихийных бедствий.
Формула изобретения
0
5
чающееся тем, что, с целью упрощения конструкции и расширения технологических возможностей обору- дования в условиях его унификации, одна из челюстей выполнена в виде сменного модуля и выполнена в верхней части в виде полого корпуса, установленного с возможностью неподвижного крепления ее монтажным пальцем к рукояти, а вторая челюсть соединена с гидроцилиндром управления, имеет установленный соосно монтажному пальцу цилиндрический барабан с продольным пазом, при этом рукоять снабжена направляющей втулкой, установленным в ней фиксатором и соединенным с ним штоком гидроцилиндром одностороннего действия, а фиксатор размещен с возможностью установки его в продольном пазу цилиндрического барабана при смыкании челюстей.
ВидА
Фиг Л
Фиг 6
17782 5
Фиг. 5
Фиг.7
8
Фиг. 8
Фиг.§
8
Фиг, Ю
В
/7/sT/ /// /// ///
| Рабочее оборудование гидравлического экскаватора | 1982 |
|
SU1081291A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1331960A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ( РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | |||
