Изобретение относится к точному машиностроению, а именно к гирокомпасам,
Известен маятниковый гирокомпас, содержащий корпус, внутри которого на магнитном подвесе на штангах монтирован трехстепенной чувствительный элемент с ферромагнетиками, установленными против электромагнитов коррекции, датчики угла и момента.
Недостатками известного .устройства являются большие габариты.
С целью снижения габаритов гирокомпас снабжен торсионом, проходящим внутри штанги и соединяющим ферромагнитный сердечник штанги с дном корпуса, при этом чувствительный элемент выполнен в виде двух разнесенных и соединенных горизонтальной связью гиромоторов, подвешенных к штанге на гибких связях.
На чертеже представлена схема маят- никового гирокомпаса.
Гирокомпас содержит корпус 1, внутри которого на магнитном подвесе 2 на штангах 3 монтирован трехстепенной чувствительный элемент, снабженный ферромаг- нетиками 4 и 5, установленными против магнитного подвеса 2 и электромагнитов 6 коррекции. Гирокомпас снабжен также датчиками угла и момента (на чертеже не показаны) и торсионом 7, проходящим внутри штанги 3 и соединяющим ферромагнитный сердечник А штанги 3 с дном корпуса 1.
Чувствительный элемент выполнен.в виде двух разнесенных и соединенных горизонтальной связью 8 гиромоторов 9, подвешенных к штангеЗ на гибких связях 10. Система коррекции гироскопа включает электроключ 11, установленный последовательно с источником 12 питания и регулятором 13.
В процессе работы гирокомпаса возникает необходимость корректировки положения чувствительного элемента, которая осуществляется путем перекидывания ключа 11 в соответствующее положение. Это приводит к тому, что подается электрический ток на соответствующий электромагнит б, осуществляя азимутальную коррекцию.
Формула изобретения Маятниковый гирокомпас, содержащий корпус1, внутри которого на магнитном подвесе на штангах смонтирован трехстепенной чувствительный элемент с ферромагнетиками, установленными против электромагнитов коррекции, датчики угла и момента, отличаю щи йся тем, что, с целью снижения габаритов, он снабжен торсионом, проходящим внутри штанги и соединяющим ферромагнитный сердечник штанги с дном корпуса, при этом чувствительный элемент выполнен в виде двух разнесенных и соединенных горизонтальной связью гиромоторов, подвешенных к штанге на гибких связях.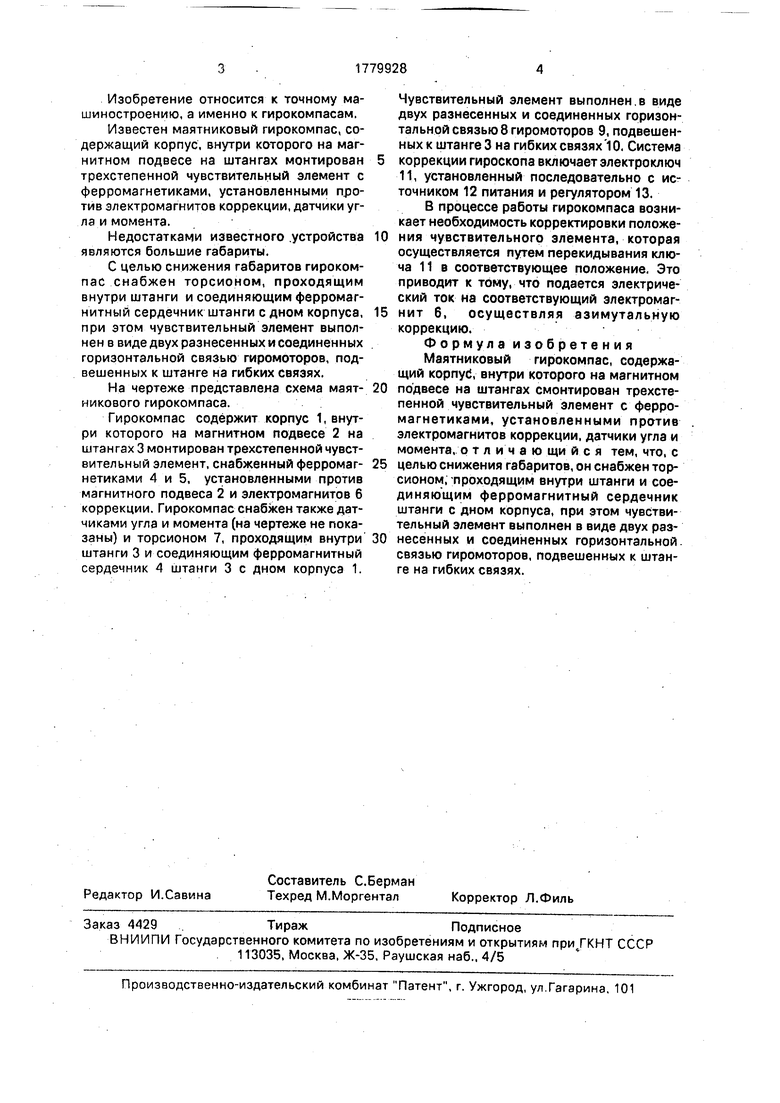
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1991 |
|
RU2046288C1 |
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1988 |
|
SU1575661A1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
Изобретение относится к точному машиностроению, а именно к гирокомпасам. Целью изобретения является уменьшение габаритов. В корпусе 1 гирокомпаса на торси оне 7 подвешивается штанга 3, к которой на гибких связях 10 крепится чувствительный элемент в виде двух разнесенных и со- единенных горизонтальной связью 8 гидромоторов 9. На гидромоторах 9 и щтан- ге 3 установлены ферромагнетики 4 и 5, причем ферромагнетик 4 взаимодействует с магнитным подвесом 2. а ферромагнетики 5 - с электромагнитами 6. Путем подачи электрического тока на один из электромагнитов 6 осуществляется азимутальная коррекция гирокомпаса. 1 ил. (Л С vi XJ 4D ЧЭ N3 00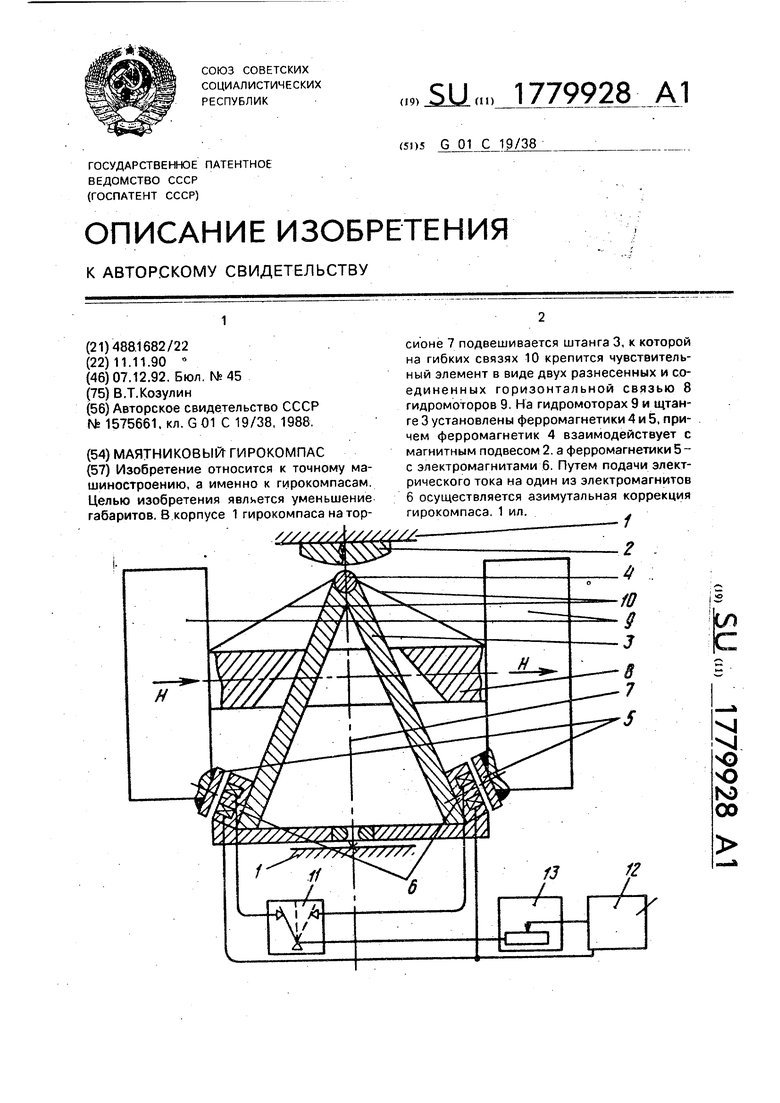
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1988 |
|
SU1575661A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
