Изобретение относится к гироскопическому приборостроению, а именно к гирокомпасам, предназначенным для определения географического меридиана.
Целью изобретения является повышение точности гирокомпаса путем повышения стабильности характеристик датчика компенсационного момента.
На чертеже представлена блок-схема маятникового гирокомпаса.
Чувствительный элемент гирокомпаса содержит маятниковый гироскоп 1, укрепленный на штанге 2, к верхнему торцу которой прикреплен шаровой ферромагнитный сердечник 3 и якорь 4 датчика момента, выполненный из магнитомягкого материала (например, в виде винтов крепления шарового сердечника 3 к штанге 2). Электромагнит магнитного подвеса броневого типа содержит сердечник 5, корпус 6 и катушку 7, подключенную к выходу системы 8 стабилизации магнитного подвеса, вход которой подключен к датчику 9 перемещения (например, индуктивному) чувствительного элемента по оси подвеса. На корпусе 6 электромагнита укреплены в горизонтальной плоскости катушки 10 статора датчика момента, подключенные через индикатор 11 к выходу системы 12 стабилизации чувствительного элемента в азимуте, вход которой подключен к датчику 13 угла (например, фотоэлектрическому). Система передачи энергии для питания гиромотора может быть выполнена известным образом, например на основе воздушного трансформатора (как в прототипе), так и с использованием гибких токоподводов.
Гирокомпас работает следующим образом. Предварительно корпус 6 электромагнита выставляется по вертикали, а плоскость прибора, изображенная на чертеже, приближенно, например, с использованием магнитного компаса, устанавливается в плоскость меридиана. После подачи питания на гиромотор гироскопа 1, разгона ротора, включения системы 8 стабилизации магнитного подвеса и системы 12 стабилизации, чувствительный элемент разарретируется. Сила со стороны электромагнита уравновешивает вес чувствительного элемента при некотором зазоре между сердечниками 5 и 3, а система 8 стабилизации магнитного подвеса отрабатывает внешние возмущения, поддерживая изменением тока в катушке 7 величину воздушного зазора на заданном уровне.
Якорь 4 датчика момента, расположенный на чувствительном элементе из магнитомягкого материала, намагничивается полем подвеса. При протекании тока в катушках 10 статора датчика момента возникает моментное воздействие поля катушек на якорь 4 и чувствительный элемент. Поскольку датчик момента расположен в горизонтальной плоскости, момент, действующий на чувствительный элемент с его стороны, направлен по оси подвеса или вверх, или вниз в зависимости от направления тока в катушках 10 статора датчика момента. Система 12 стабилизации работает таким образом, что изменение азимутального положения чувствительного элемента регистрируется датчиком 13 угла и вызывает момент, приводящий чувствительный элемент в положение, в котором сигнал датчика угла равен нулю. При этом ориентация в азимуте датчика 13 угла, жестко связанного с корпусом прибора, и кинетического момента Н гироскопа 1 совпадают.
Если корпус прибора предварительно выставлен так, что датчик 13 угла точно ориентирован на север, система 12 стабилизации приводит и удерживает чувствительный элемент в положении, в котором кинетический момент гироскопа 1 также точно направлен на север. При этом ток в катушках 10 статора датчика момента отсутствует, индикатор 11 азимута показывает 0 и на чувствительный элемент не действуют никакие моменты. При неточной ориентации датчика 13 угла в северном направлении удержание кинетического момента гироскопа 1 в азимуте датчика 13 угла возможно лишь при компенсации гироскопического момента, действующего на чувствительный элемент за счет вращения Земли, моментом, действующим на чувствительный элемент со стороны датчика момента. При этом ток в катушках 10 статора датчика момента не равен нулю и индикатор 11 азимута показывает угол отклонения чувствительного элемента и корпуса прибора от плоскости меридиана.
В силу того, что шаровой ферромагнитный сердечник 3, якорь 4, катушки 10 статора датчика момента и корпус 6 электромагнита образуют единую магнитную цепь катушки 7 электромагнита подвеса, намагниченность магнитомягкого якоря 4 датчика момента определяется магнитным полем, возбуждаемым этой катушкой. Магнитное же поле электромагнита определяется весом чувствительного элемента, т. е. величиной, не зависящей от температуры. В результате стабильность характеристик датчика момента повышается, что приводит к повышению точности маятникового гирокомпаса в компенсационном быстродействующем режиме измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1991 |
|
RU2046288C1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| Маятниковый гирокомпас | 1990 |
|
SU1779928A1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
Изобретение относится к гироскопическому приборостроению, а именно к гидрокомпасам, предназначенным для определения географического меридиана. Целью изобретения является повышение точности гирокомпаса путем повышения стабильности характеристик датчика компенсационного момента. Ферромагнитный сердечник 3, якорь 4 и катушка 10 датчика момента и корпус 6 образуют последовательную магнитную цепь, величина магнитного потока в которой определяется весом чувствительного элемента. Это обеспечивает стабильность характеристик датчика момента. 1 ил.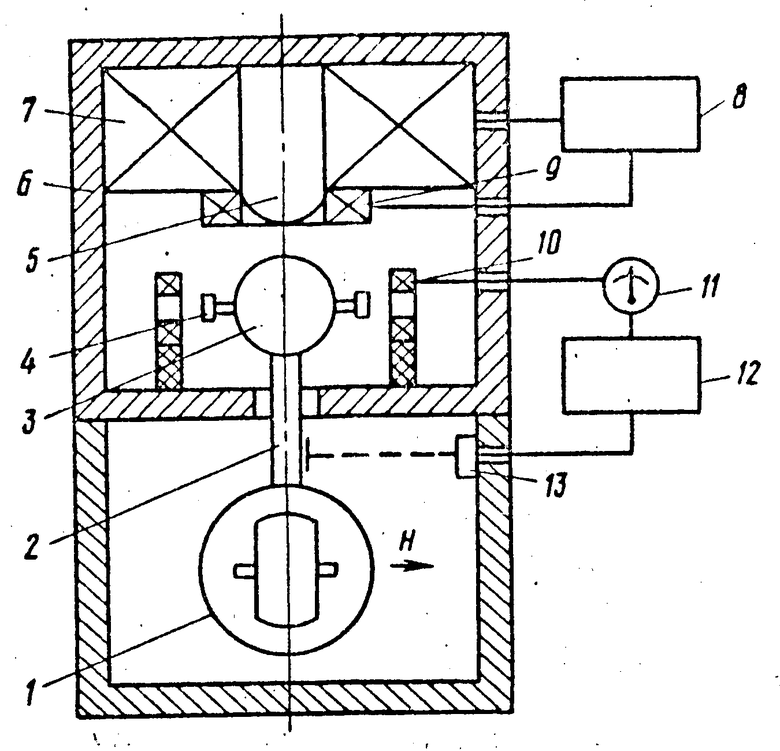
МАЯТНИКОВЫЙ ГИРОКОМПАС, содержащий корпус, чувствительный элемент с гиромотором, магнитный подвес с ферромагнитным сердечником на чувствительном элементе и с электромагнитом на корпусе, систему стабилизации магнитного подвеса, датчик осевых перемещений чувствительного элемента, выход которого через систему стабилизации магнитного подвеса подключен к обмотке электромагнита, последовательно соединенные датчик угла поворота чувствительного элемента, систему стабилизации чувствительного элемента в азимуте и датчик компенсационного момента в виде якоря, установленного на чувствительном элементе, и статорных катушек, укрепленных на корпусе, отличающийся тем, что, с целью повышения точности путем повышения стабильности характеристик датчика компенсационного момента, якорь датчика компенсационного момента выполнен из магнитомягкого материала и расположен на ферромагнитном сердечнике магнитного подвеса, причем электромагнит магнитного подвеса, ферромагнитный сердечник, якорь датчика момента и корпус объединены в последовательную магнитную цепь.
| Воронков Н.Н | |||
| и др | |||
| Гироскопическое ориентирование | |||
| М.: Недра, 1980, с.259, 274-276. |
