Изобретение относится к навигации, а именно к определению навигационных параметров для выполнения посадки на дрейфующие ледовые поля (льдины) в условиях их планово-азимутальной нестабильности, возможной деформации отсутствия координат пунктов, наземного навигационного обеспечения
Известен способ подготовки и выполнения захода на посадку в котором летательный аппарат (ЛА) выполняет подлет к району аэродрома и заход на посадку на взлетно-посадочную полосу (ВПП) по данным штурманской прокладки с использованием координат аэродрома, посадочного магнитного путевого угла (азимута оси ВПП), той или иной установленной схемы захода на посадку Формируемые при этом навигационные параметры курсы и дальности рассчитываются в системах координат, у которых ориентация осей и местоположение центра заранее обусловлены Привлекаемые при этом средства посадки обладают малой точностью выдаваемых линейных и угловых параметров
Использование данного способа позволяет произвести подлет и заход на посадку на дрейфующую льдин только при визуяль
vi vi о ч со
ном наблюдении летчика за ВПП, так как истинный или магнитный азимут оси ВПП в данном случае является неизвестным. Расчет линейных и угловых навигационных параметров при подлете и заходе на посадку даже при установке на льдине той или иной посадочной системы невозможен ввиду того, что штурман выполняет свои расчеты в системе координат, не связанной с положением льдины на момент данного подлета, что не позволяет автоматизировать процесс. Деформация же льдины в районе ВПП может быть выявлена только путем ее предварительного наземного обследования.
Наиболее близким техническим решением по выполняемым операциям является способ определения навигационных параметров и автоматического захода на посадку с использованием авиационного навигационного комплекса АНК-11. В этом способе при подлете и заходе на посадку формируются и индицируются боковые уклонения Л А от линии заданного пути, заданный курс и дальность до заданной точки. На участке подлета эти параметры вырабатываются по данным инерционной системы, а при заходе на посадку поданным курсового и глиссадного радимаяков.
К недостаткам данного способа относятся следующие:
перед полетом требуется введение координат аэродрома, радионавигационных точек, а также азимута оси ВПП, введение же этих данных применительно к ВПП дрейфующей льдины вообще не представляется возможным;
системы координат курсового и глиссадного радиомаяков на дрейфующей льдине не связаны с используемой на борту системой координат, и поэтому информация от этих радиомаяков не может быть использована вычислителем в автоматическом режиме;
деформация ледового поля в районе ВПП на момент посадки никак не учитывается с помощью привлекаемых навигационных средств, учет же этого фактор возможен только при наличии геодезического обеспечения, что исключает возможность автоматизации с учетом деформаций;
кроме того, привлекаемое в данном случае навигационное оборудование требует наличия на льдине обслуживающего персонала, что в большинстве случаев является невозможным по целому ряду объективных причин;
привлекаемые в способе средства обладают малой точностью формирования угловых и линейных параметров.
Целью изобретения является повышение точности определения навигационных параметров и повышение безопасности посадки путем учета планово-азимутальной
нестабильности и возможной деформации взлетно-посадочной полосы (ВПП).
Поставленная цель достигается тем, что в способе определения навигационных параметров для выполнения посадки ЛА на
0 дрейфующую льдину, включающем определение и индикацию в полете заданного курса, высоты, бокового отклонения и дальности до заданной точки, дополнительно размещают на льдине не менее трех от5 ветчиков дальномерной системы так, чтобы образуемая ими фигура содержала внутри себя ВПП, измеряют в процессе эталонного облета, осуществляемого с внешней стороны совокупности ответчиков, дальности от
0 ЛА до каждого из ответчиков, при завершении облета формируют разности измеренных дальностей до каждой из пар ответчиков, определяют их максимальные по абсолютной величине значения, произ5 водят визуальную посадку ЛА на ВПП льдины, измеряют дальности до ответчиков в моменты нахождения ЛА на концах ВПП, определяют и регистрируют координаты ответчиков, концов ВПП, по определенным
0 параметрам формируют посадочную траекторию в схемах заходов на посадку с правого и левого кругов с разных концов ВПП в системе координат льдины с началом в центре ВПП и ориентацией одной из ее осей
5 вдоль оси ВПП. при выполнении каждого из последующих подлетов измеряют дальности до ответчиков, формируют индицируемые навигационные параметры: заданный курс, высоту, боковое отклонение и даль0 ность в системе координат льдины, перед следующей посадкой осуществляют контрольный облет с внешней стороны совокупности ответчиков, измеряя и регистрируя те же параметры, что и при эталонном объекте
5 после облета при расхождениях между соответствующими полученными из эталонного и контрольного облетов максимальными по абсолютной величине разностями дальностей, не превышающих для всех пар от0 ветчиков порогового значения, формируют и индицируют команду на разрешение посадки, а при превышении порогового значения хотя бы для одной из пар ответчиков формируют и инициируют команду на за5 прет посадки, при выполнении посадки заданный курс и высоту определяют в виде поправок к соответственно фактическим курсу и высоте.
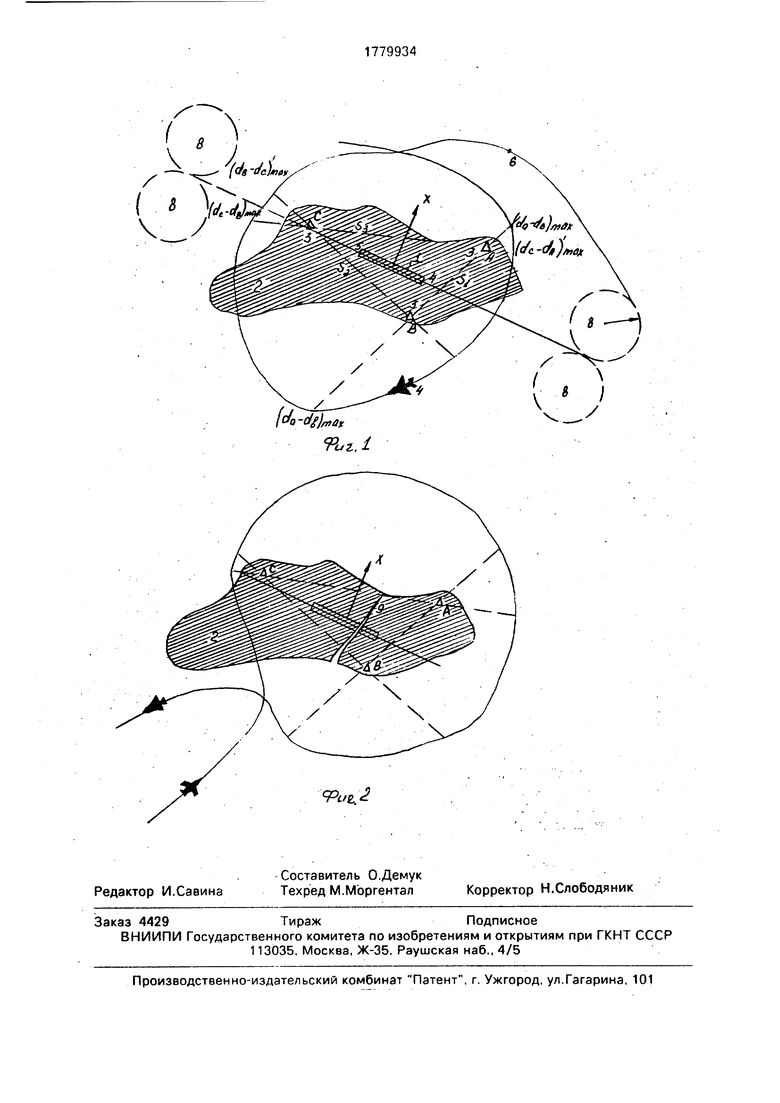
На фиг.1 приводится взаимное располо- жение льдины, ответчиков и трасса кругового эталонного облета при создании навигационного обеспечения; на фиг.2 - ситуация, когда через ВПП проходит трещина льдины.
Способ осуществляется следующим образом.
При выборе ВПП 1 на льдине 2 (ледовом поле) производится произвольная установка не менее трех ответчиков 3 (А,В,С) даль- номерной системы таким образом, чтобы наряду с обеспечением наилучшей геометрической засечки с них обеспечивался охват извне полученной из них совокупности фигурой (в данном случае треугольником ABC) поверхности ВПП. ЛА 4 с запросчиком даль- номерной системы и бортовой цифровой ЭВМ (БЦВМ) выполняет Эталонный облет извне по отношению к этой совокупности ответчиков 3, При выполнении облета производится непрерывное измерение дальностей от ЛА до каждого из ответчиков с частотой опроса каждого из них не менее 5 Гц. Полученные дальности по мере их поступления обрабатываются ВБЦВ в реальном масштабе времени. В ходе вычислений формируются приведенные к горизонтальной плоскости по данным высотомера разности дальностей для каждой из пар ответчиков. Из геометрических построений очевидно, что где бы ни t аходился ЛА, максимальная разность дальностей до двух ответчиков будет только в момент нахождения ЛА на одной линии с этими двумя ответчиками- и при этом она будет равна расстоянию между ответчиками, то есть Si, Sa и Зз (фиг.1).
При выполнении эталонного облета летчик с пульта управления (ПУ) формирует нажатием кнопки команды начала и конца облета, причем конец облета можно для обеспечения надежности формировать с перекрытием начала облета.
С начала облета и до его конца БЦВМ принимает коды дальностей, формирует их физические значения и заносит в ОЗУ разности дальностей. При появлении команды конца облета БЦВМ прекращает считывать дальности и, используя фильтрацию по методу наименьших квадратов, формирует применительно к схеме, указанной на фиг.1, следующие значения расстояний между ответчиками:
S| /dA - dB/max /dA - ds/ max: S2 /dB - be/max /Ьв - dc/ max: S2 /dc - dA/max /dc - dA/ max.
Полученные значения запоминаются на магнитном накопителе БЦВМ. Выполнив эталонный облет, летчик выполняет визуальную посадку на ВПП и путем рулежки на
полосе с ПУ формирует команды на измерение дальностей в момент нахождения ЛА на концах ВПП. то есть в точках 4 и 5 (фиг,1). По дальностям от ответчиков до концов ВПП и 5 расстояниям между ответчиками БЦВМ формируют координаты ответчиков, концов ВПП и азимут ВПП в системе координат льдины, ориентированной осью по оси ВПП с началом в центре ВПП (см. фиг.1),
10 . При последующих штатных подлетах к льдине выполняются следующие операции. При выходе ЛА в район расположения льдины на удалении 100-50 км производится переход на автоматическое наведение
5 непосредственно на центр ВПП льдины. По команде с ПУ запросчик начинает формировать дальности до ответчиков и передавать их. на обработку в БЦВМ. По дальностям формируются текущие координаты ЛА в си0 стемекоординат льдины.
По координатам двух точек трассы, удаленных друг от друга на расстояние 150-200 м, формируется текущий, курс в системе координат льдины. Одновременно с этим в той
5 же системе формируется текущий курс на точках начала координат (центр ВПП). Разность между этими двумя курсами является поправкой к текущему истинному или магнитному курсу ЛА. Данная поправка индиС цируется летчику, задачей которого является путем разворота ЛА свести ее к нулю, причем угол сноса в данном случае не влияет на индицируемую курсовую поправку.
5 Одновременно с этим формируется и индицируется дальность до центра ВПП, а также рекомендуемая дальность до начала контрольного облета. При достижении льдины летчик, ориентируясь на индицируемые
0- дальности, выводит ЛА на контрольный облет ответчиков (фиг.2). Выполняемые при этом операции аналогичны операциям эталонного облета, причем траектория контрольного облета может быть произвольной.
5 При поступлении в ПУ команды конца контрольного облета БЦВМ, используя аналогичные эталонному облету вычисления, формирует контрольные расстояния между ответчиками и производит сравнение всех
0 соответствующих эталонных и контрольных максимальных разностей дальностей (разность между эталонными и контрольными расстояниями между ответчиками). Если из сравнения установлено, что расхождение
5 для каждой из пар ответчиков не превышает порогового значения, которое применительно к предполагаемому бортовому устройству равно 0,5 м, то формируется и индицируется команда разрешения посадки-.
При этом на всех участках 6-4 (фиг,1) БЦВМ формирует и индицирует боковое уклонение от заданной траектории на данном участке, поправку к фактическому курсу и рассогласование между фактической и заданной высотами.
В случае, если установлено, что по данным контрольного облета расстояния хотя бы для одной пары ответчиков отличаются от эталонных значений, то это означает деформацию льдины в районе ВПП9 (фиг.2). В этом случае формируется и инициируется команда на запрет посадки и летчик принимает решение или на визуальную посадку в другой части льдины, или о возврате на исходный или ззпасной аэродром,
Способ реализуется с помощью галсо- вой радионавигационной системы, содержащей бортовое оборудование в составе блока запросчика, блока обработки сигналов с пультом управления на базе БЦВМ типа ТС-12-101 с соответствующими аппаратно-программными средствами и блока антенно-фидерных устройств, а также наземного оборудования в виде трех или более ответчиков.
Дальность действия системы 400 км, точность измерения дальностей ±Д х .
Предложенный способ позволяет обеспечить безопасность посадок ЛА как на дрейфующие, так и на неподвижные ледовые поля (льдины) в сложных метеоусловиях с отсутствием возможности определения координат ответчиков и геодезического контроля за деформацией ВПП.
Формула изобретения
Способ определения навигационных параметров для выполнения посадки летательного аппарата на дрейфующую льдину, включающий определение и индикацию в полете заданного курса, высоты, бокового отклонения и дальности до заданной точки, отличающийся тем, что, с целью повышения точности определения навигационных параметров и повышения безопасности посадки путем учета планово-азимутальной нестабильности и возможной деформации взлетно-посадочной полосы (ВПП), дополнительно размещают на льдине не менее трех ответчиков дально- мерной системы так, чтобы образуемая
ими фигура содержала внутри себя ВПП, измеряют в процессе эталонного облета, осуществляемого с внешней стороны совокупности ответчиков, дальности от ЛА до каждого из ответчиков, при завершении облета формируют разности измеренных дальностей до каждой из пар ответчиков, определяют их максимальные по абсолютной величине значения, производят визуальную посадку ЛА на ВПП льдины,
измеряют дальности до ответчиков в моменты нахождения ЛА на концах ВПП, опре- деляют и регистрируют координаты ответчиков , концов ВПП, по определенным параметрам формируют посадочную траекторию в схемах заходов на посадку с правого и левого кругов с разных концов ВПП в системе координат льдины с.началом в центре ВПП и ориентацией одной из осей вдоль оси ВПП, при выполнении каждого из последующих подлетов измеряют дальности до ответчиков, формируют индицируемое навигационные параметры - заданный курс, высоту, боковое отклонение и дальность в системе координат льдины, перед следующей посадкой осуществляют контрольный облет с внешней стороны совокупности ответчиков, измеряя и регистрируя при этом те же параметры, что и при эталонном облете, после облета при расхождениях между
соответствующими полученными из эталонного и контрольного облетов максимальными по абсолютной величине разностям дальностей, не превышающих для всех пар ответчиков порогового значения, формируют и индицируют команду на разрешение посадки, при превышении порогового значения хотя бы для одной пары ответчиков формируют и индицируют команду на запрет посадки, при выполнении посадки заданный курс и высоту определяют в виде поправок к соответственно фактическому курсу и высоте.
Я/г./
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ ПЛАВСРЕДСТВА | 1990 |
|
RU2030754C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА НАВИГАЦИОННУЮ ТОЧКУ С ЗАДАННОГО НАПРАВЛЕНИЯ | 2015 |
|
RU2585204C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
Изобретение относится к навигации, а именно к определению навигационных параметров для выполнения посадки летательного аппарата (ЛА) на дрейфующую льдину. Целью изобретения является повышение точности определения навигационных параметров и повышение безопасности посадки ЛА путем учета планово-азимутальной нестабильности и возможности и возможной деформации ВПП. Способ заключается в том, что размещают на льдине ответчики, формируют при эталонном облете координаты ответчиков и ВПП, формируют и индицируют при всех последующих подлетах и посадках боковые уклонения, поправки к фактическому курсу и другие навигационные параметры. Перед выполнением захода на посадку производят контрольный облет, в результате которого устанавливают факт отсутствия деформации ВПП с формированием и индикацией сообщения о разрешении посадки. При этом навигационные параметры формируются в системе координат текущего положения льдины, что обеспечивается автоматическим формированием координат ответчиков и ВПП льдины, перед заходом на посадку устанавливается факт отсутствия деформаций льдины.2 ил. сл С
| Хиврич И.Г | |||
| и др | |||
| Автоматизированное вождение воздушных судов | |||
| М.: Транспорт, 1985, с | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Белкин A.M | |||
| и др | |||
| Воздушная навигация: Справочник | |||
| М.: Транспорт | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
