Изобретение относится к измерительной технике и может быть использовано для измерения параметров вибрации, в общем случае, по всем шести степеням свободы условно неподвижного обьекта. т.е. объекта, совершающего вибрационные движения, не имеющие постоянных составляющих по линейным иугловым перемещениям.
Известны устройства для измерения ускорений: угловые акселерометры, линейные акселерометры и комплексные измерительные устройства. Традиционно в виброизмерительной технике такие измерители используются для измерения углового и/или кажущегося ускорения (т.е. векторной разности абсолютного линейного ускорения и ускорения силы тяжести). Таким образом, в известных Bi/броизмерительных устройствах информац w о линейных и угловых перемещениях не разделяется
Известно устройство для определения параметров многомерного движения - бесплатформенная инерциальная навигационная система (БИНС) - построенная на основе, в общем случае, шести линейных акселерометров и позволяющая определять все необходимые параметры многомерного движения обьекта - перемещения по всем шести обобщенным координатам (трем линейным и трем угловым). Причем, линейные и угловые координаты в БИНС определяются раздельно.
Недостатком этого устройства, из-за которого оно не нашло практического применения для задач навигации, является малая точность определения линейных и угловых перемещений из-за значительных ошибок при выполнении операций двойного интегрирования соответствующих ускорений.
За прототип принято устройство для измерения механических вибраций, например, в мотоцикле, состоящее из одного линейного акселерометра, блока преобразования (БП) и блока регистрации (БР),
С
ч
СП СЛ XI
диненных последовательно. Недостатком этого устройства является недостаточная точность определения линейных ускорений, т.к. акселерометр измеряет кажущееся ускорение объекта (т.е. векторную разность абсолютного линейного ускорения и ускорения силы тяжести). Таким образом, отсутствие разделения информации о линейном и угловом движении приводит к погрешности в определении линейного ускорения объекта, возникающей из-за наличия в сигнале акселерометра составляющей, соответствующей проекции ускорения силы тяжести на ось чувствительности акселерометра.
Цель изобретения - повышение точности измерения параметров вибрации условно-неподвижного объекта.
Указанная цель достигается тем, что устройство для измерения линейных и угловых вибраций снабжено вторым линейным акселерометром, измерительная ось которого параллельна измерительной оси первого акселерометра и оба акселерометра расположены на равном расстоянии R от точки, в которой проводятся измерения, счетно-решающим устройством (СРУ). первый вход которого соединен с выходом первого акселерометра, а второй вход соединен с выходом второго акселерометра, а также вторым блоком преобразования (БП), который соединен со вторым выходом СРУ, а первый выход СРУ соединен с первым БП, в свою очередь, оба выхода БП соединены с блоком регистрации (БР). Первый и второй входы СРУ являются, с одной стороны, входами первого вычитающего устройства, которое последовательно связано через усилитель с коэффициентом усиления К1 1/2R и первый двойной интегратор с первым фильтром высоких частот (ФВЧ), а с другой стороны - входами суммирующего устройства, которое последовательно соединено через усилитель с коэффициентом усиления К2 1 /2. Первый выход СРУ через усилитель с коэффициентом усиления КЗ 9,81 связан со вторым входом второго вычитающего устройства, которое в свою очередь, последовательно связано через второй двойной интегратор со вторым ФВЧ, выход которого является вторым выходом СРУ.
Известно СРУ БИНС, которое осуществляет разделение углового и линейного перемещений движущегося объекта по сигналам акселерометра и отличается от СРУ заявляемого устройства для измерения вибрации тем, что в нем отсутствуют первый и второй ФВЧ. Недостатком схемы БИНС, из-за которого она не нашла практического применения, является малая точность определения параметров линейного и углового движения объекта из-за ошибок при выполнении операций двойного интегрирования. Введение ФВЧ в СРУ БИНС привело бы к
потере полезной информации о возможных постоянных и низкочастотных составляющих линейного и углового движения подвижных объектов. Заявляемое устройство предназначено для измерения вибрации ус0 ловно-неподвижных объектов (например, транспортных средств на стоянке), т.е. объектов, совершающих вибрационное движение, не имеющее постоянных составляющих по линейным и угловым перемещениям.
5 При проведении виброизмерений на условно-неподвижном объекте применение в СРУ операции ВЧ-фильтрации после операции двойного интегрирования позволяет существенно увеличить точность определения
0 параметров линейной и угловой вибрации объекта за счет устранения ошибок двойного интегрирования и не приводит к потере полезной информации, т.к. при исследовании и измерении вибрационных процессов
5 обычно ограничиваются частотным диапазоном выше некоторой фиксированной частоты, например, 0,1 Гц, исходя из которой выбирают частоту среза ВЧ-фильтра. Таким образом, применение известного СРУ со0 вместно с ФВЧ обеспечивает появление у заявляемого устройства для измерения вибрации нового свойства, а именно - высокой точности определения параметров угловой и линейной вибрации за счет разделения
5 информации о линейном и угловом перемещении в случае пространственной вибрации условно неподвижных объектов, а также за счет устранения ошибок операции двойного интегрирования. Следовательно, заяв0 ляемое техническое решение соответствует критериям существенных отличий и новизны.
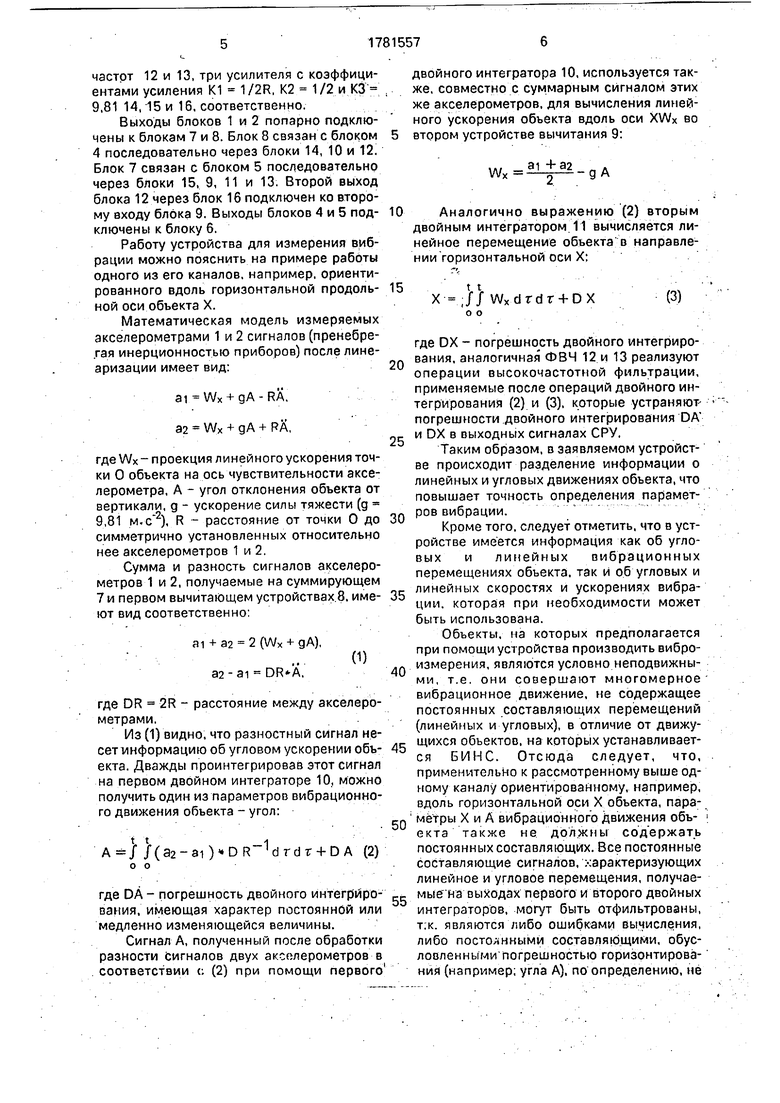
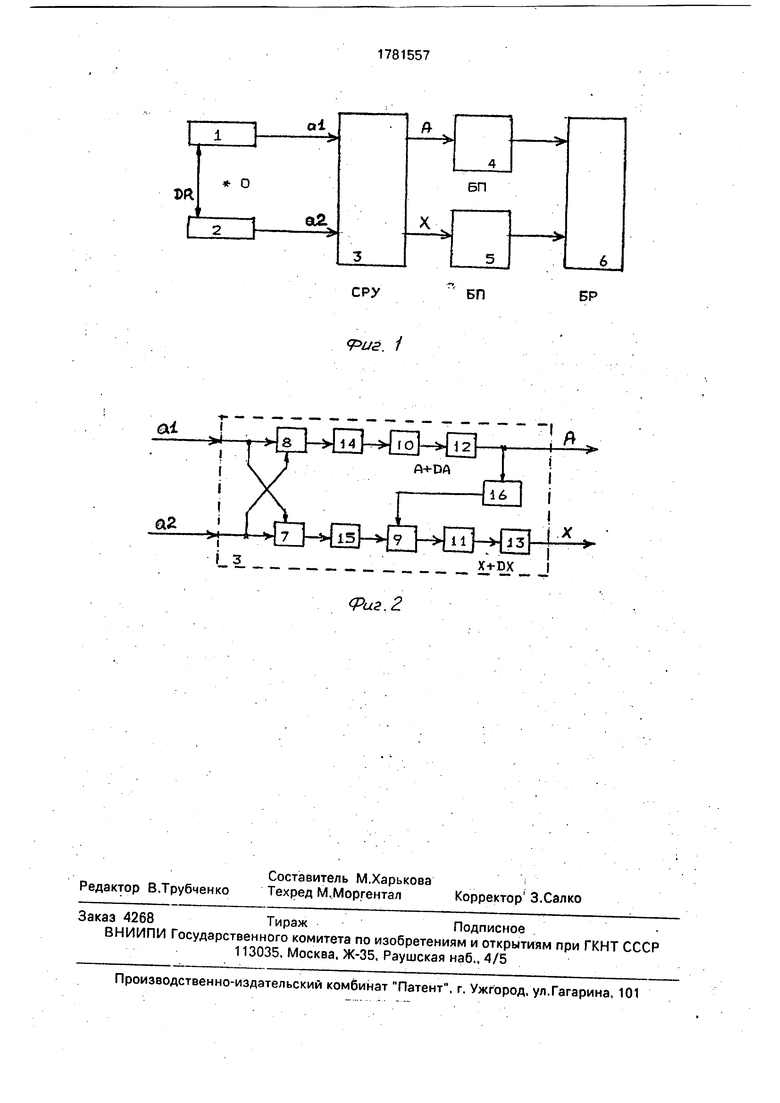
На фиг. 1 изображена блок-схема устройства для измерения линейных и угловых
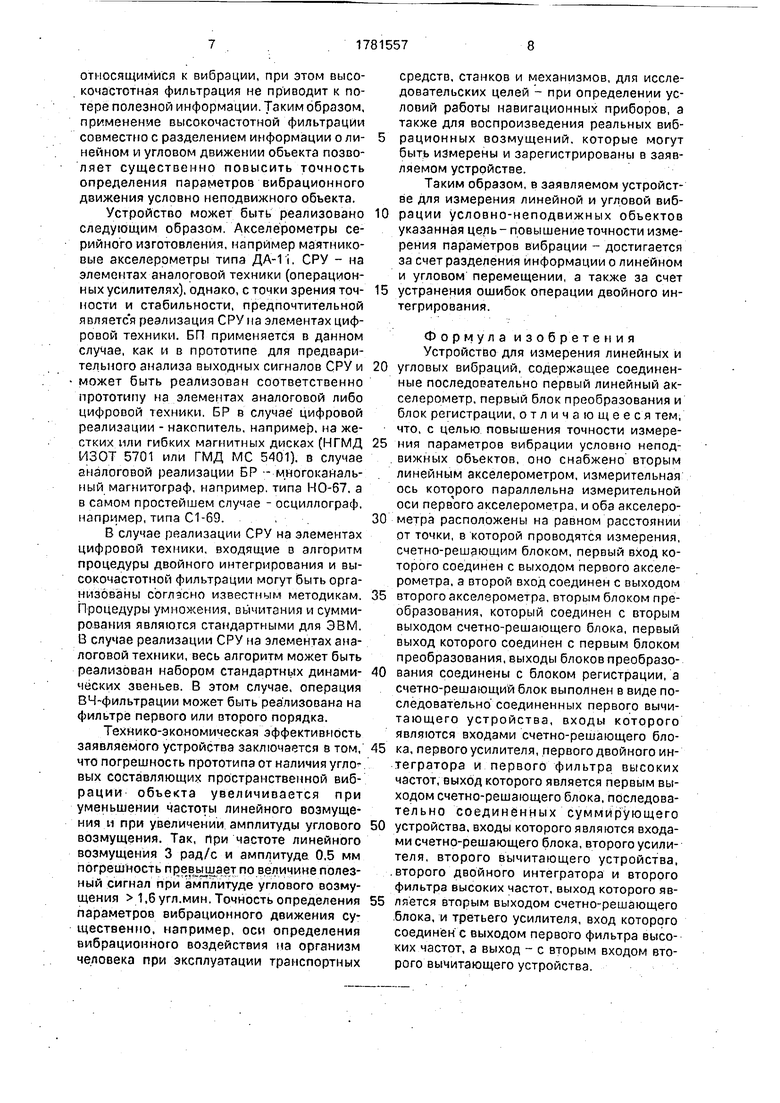
5 вибраций; на фиг. 2 - блок-схема СРУ,
Устройство содержит по крайней мере один канал, состоящий из двух акселерометров 1 и 2, счетно-решающего устройства (СРУ) 3, двух блоков преобразования (БП) 4
0 и 5, а также блока регистрации (БР) 6.
Два идентичных с параллельными осями чувствительности линейных акселерометра 1 и 2 расположены на равных расстояниях от точки О (в качестве которой
5 выбирается точка, в которой необходимо произвести в иброизмерения),
Счетно-решающее устройство содержит одно суммирующее устройство 7, два вычитающих устройства 8 и 9, два двойных интегратора 10 и 11, два фильтра высоких
частот 12 и 13, три усилителя с коэффициентами усиления К1 1/2R, К2 1/2 и КЗ 9,81 14, 15 и 16, соответственно.
Выходы блоков 1 и 2 попарно подключены к блокам 7 и 8. Блок 8 связан с блоком 4 последовательно через блоки 14, 10 и 12. Блок 7 связан с блоком 5 последовательно через блоки 15, 9, 11 и 13. Второй выход блока 12 через блок 16 подключен ко второму входу блока 9. Выходы блоков 4 и 5 под- ключены к блоку 6.
Работу устройства для измерения вибрации можно пояснить на примере работы одного из его каналов, например, ориентированного вдоль горизонтальной продоль- ной оси объекта X.
Математическая модель измеряемых акселерометрами 1 и 2 сигналов (пренебрегая инерционностью приборов) после линеаризации имеет вид:
ai Wx + gA-RA,
а2 Wx + gA + PA,
где Wx - проекция линейного ускорения точки О объекта на ось чувствительности акселерометра, А - угол отклонения объекта от вертикали, g - ускорение силы тяжести (д 9,81 м.), R - расстояние от точки О до симметрично установленных относительно нее акселерометров 1 и 2.
Сумма и разность сигналов акселерометров 1 и 2, получаемые на суммирующем 7 и первом вычитающем устройствах 8. име- ют вид соответственно1
ai + aa 2 (Wx + gA), Э2-Э1 ,
где DR 2R - расстояние между акселерометрами,
Из (1) видно, что разностный сигнал несет информацию об угловом ускорении объ- екта. Дважды проинтегрировав этот сигнал на первом двойном интеграторе 10, можно получить один из параметров вибрационного движения объекта - угол:
/(a2-ai)DR 1drdT + DA
о о
где DA - погрешность двойного интегрирования, имеющая характер постоянной или медленно изменяющейся величины.
Сигнал А, полученный после обработки разности сигналов двух акселерометров в соответствии с. (2) при помощи первого
двойного интегратора 10, используется также, совместно с суммарным сигналом этих же акселерометров, для вычисления линейного ускорения объекта вдоль оси XWX во втором устройстве вычитания 9:
W,
31 +32
gA
Аналогично выражению (2) вторым двойным интегратором 11 вычисляется линейное перемещение объекта в направлении горизонтальной оси X:
t t
X ,J7Wxdrdr + DX
(3)
о о
мых бреине20
D
(2)
25
точксеа от (д до 30 ьно
ерощемме- 35
40
еронеобъ- 45 нал жно нно50
ироили
тки в в ого
где DX - погрешность двойного интегрирования, аналогичная ФВЧ 12 и 13 реализуют операции высокочастотной фильтрации, применяемые после операций двойного интегрирования (2) и (3), которые устраняют погрешности двойного интегрирования DA и DX в выходных сигналах СРУ.
Таким образом, в заявляемом устройстве происходит разделение информации о линейных и угловых движениях объекта, что повышает точность определения параметров вибрации.
Кроме того, следует отметить, что в устройстве имеется информация как об угловых и линейных вибрационных перемещениях объекта, так и об угловых и линейных скоростях и ускорениях вибрации, которая при необходимости может быть использована.
Объекты, на которых предполагается при помощи устройства производить виброизмерения, являются условно неподвижными, т.е. они совершают многомерное вибрационное движение, не содержащее постоянных составляющих перемещений (линейных и угловых), в отличие от движущихся объектов, на которых устанавливается БИНС. Отсюда следует, что, применительно к рассмотренному выше одному каналу ориентированному, например, вдоль горизонтальной оси X объекта, параметры X и А вибрационного движения объ- екта также не должны содержать постоянных составляющих. Все постоянные составляющие сигналов, /.арактеризующих линейное и угловое перемещения, получаемые на выходах первого и второго двойных интеграторов, могут быть отфильтрованы, т.к. являются либо ошибками вычисления, либо ПОСТОАННЫМИ составляющими, обусловленными погрешностью горизонтирова- ния (например, угла А), по определению, не
относящимися к вибрации, при этом высокочастотная фильтрация не приводит к потере полезной информации. Таким образом, применение высокочастотной фильтрации совместно с разделением информации о линейном и угловом движении объекта позво- ляет существенно повысить точность определения параметров вибрационного движения условно неподвижного объекта.
Устройство может быть реализовано следующим образом. Акселерометры серийного изготовления, например маятниковые акселерометры типа ДА-1 i, СРУ - на элементах аналоговой техники (операционных усилителях), однако, сточки зрения точности и стабильности, предпочтительной является реализация СРУ на элементах цифровой техники. БП применяется в данном случае, как и в прототипе для предварительного анализа выходных сигналов СРУ и может быть реализован соответственно прототипу на элементах аналоговой либо цифровой техники. БР в случае цифровой реализации - накопитель, например, на жестких или гибких магнитных дисках (НГМД ИЗОТ 5701 или ГМД МС 5401). в случае аналоговой реализации БР - многоканальный магнитограф, например, типа НО-67, а в самом простейшем случае - осциллограф, например, типа С1-69.
В случае реализации СРУ на элементах цифровой техники, входящие в алгоритм процедуры двойного интегрирования и высокочастотной фильтрации могут быть организованы согласно известным методикам. Процедуры умножения, вычитания и суммирования являются стандартными для ЭВМ. В случае реализации СРУ на элементах аналоговой техники, весь алгоритм может быть реализован набором стандартных динамических звеньев. В этом случае, операция ВЧ-фильтрации может быть реааизована на фильтре первого или второго порядка.
Технико-экономическая эффективность заявляемого устройства заключается в том, что погрешность прототипа от наличия угловых составляющих пространственной вибрации объекта увеличивается при уменьшении частоты линейного возмущения и при увеличении амплитуды углового возмущения. Так, при частоте линейного возмущения 3 рад/с и амплитуде 0,5 мм погрешность превышает по величине полезный сигнал при амплитуде углового возмущения 1,6 угл.мин. Точность определения параметров вибрационного движения существенно, например, оси определения вибрационного воздействия на организм человека при эксплуатации транспортных
средств, станков и механизмов, для исследовательских целей - при определении условий работы навигационных приборов, а также для воспроизведения реальных вибрационных возмущений, которые могут быть измерены и зарегистрированы в заявляемом устройстве.
Таким образом, в заявляемом устройстве для измерения линейной и угловой вибрации условно-неподвижных объектов указанная цель-повышение точности измерения параметров вибрации - достигается за счет разделения информации о линейном и угловом перемещении, а также за счет
устранения ошибок операции двойного интегрирования.
Формула изобретения Устройство для измерения линейных и
угловых вибраций, содержащее соединенные последовательно первый линейный акселерометр, первый блок преобразования и блок регистрации, отличающееся тем, что, с целью повышения точности измерения параметров вибрации условно неподвижных объектов, оно снабжено вторым линейным акселерометром, измерительная ось которого параллельна измерительной оси первого акселерометра, и оба акселерометра расположены на равном расстоянии от точки, в которой проводятся измерения, счетно-решающим блоком, первый вход которого соединен с выходом первого акселерометра, а второй вход соединен с выходом
второго акселерометра, вторым блоком преобразования, который соединен с вторым выходом счетно-решающего блока, первый выход которого соединен с первым блоком преобразования, выходы блоков преобразования соединены с блоком регистрации, а счетно-решающий блок выполнен в виде последовательно соединенных первого вычитающего устройства, входы которого являются входами счетно-решающего блока, первого усилителя, первого двойного интегратора и первого фильтра высоких частот, выход которого является первым выходом счетно-решающего блока, последова- тельно соединенных суммирующего
устройства, входы которого являются входами счетно-решающего блока, второго усилителя, второго вычитающего устройства, второго двойного интегратора и второго фильтра высоких частот, выход которого является вторым выходом счетно-решающего блока, и третьего усилителя, вход которого соединен с выходом первого фильтра высоких частот, а выход - с вторым входом второго вычитающего устройства.
СРУ
БП
БР
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2146806C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности при измерениях условно неподвижного обьекта. Сигналы с линейных акселерометров поступают на входы счетно-решающего блока, где после усиления, двойного интегрирования с определенными весами, задаваемыми усилителями и фильтрации на выходах получают сигналы, несущие информацию о линейных и угловых движениях обьекта. 2 ил.
Риг. 1
(Риг.2
| Трехкомпонентный акселерометр | 1980 |
|
SU934391A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения катионов металлов переменной валентности | 1983 |
|
SU1137377A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
