Изобретение относится к метрологии и может быть использовано в часовой промышленности при проектировании и производстве кварцевых часов с аналоговой индикацией.
Известен способ контроля электронно- механических часов с использованием магнитного поля, с помощью которого могут быть проверены только электронные блоки часов.
Известен также способ контроля кварцевых электронно-механических часов с шаговым двигателем путем воздействия на них магнитного поля параллельно плоскости циферблата, обеспечивающий контроль часов в целом.
Однако этот способ не обеспечивает объективного контроля, гарантирующего надежность функционирования часов в процессе эксплуатации из-за возможного значительного разброса момента, создаваемого шаговым двигателем, с одной стороны, и значительными комбинациями момента нагрузки, создаваемой всей колесной системой часов, с другой сторЪны.
Некоторые из причин, вызывающих названные колебания момента двигателя и момента нагрузки или их сочетания при определенных обстоятельствах особенно сильно влияют на возрастание момента нагрузки и на изменение соотношения моментов двигателя и нагрузки. Например, при определенных положениях часов в пространстве превышение зазором допустимых норм приводит к сбоям в работе часов.
Все вышеперечисленное многообразие факторов при любых сочетаниях самых неблагоприятных условий и обстоятельств не должно приводить к тому, чтобы минимальное значение упомянутого соотношения моментов снижалось ниже (3-5), в то бремя как максимальное значение отношения может достигать нескольких десятков.
На сегодняшний день отсутствуют способы и средства контроля, способные обеспечить определение отношения момента вра щения шагового деигатТзля к моменту торможения нагрузки при любом положении часов в пространстве в интервале времени, равном одному обороту часового колеса, позволяющем выявить взаимодействие всех зубьев колес друг с другом.
Это приводит к тому, что несколько процентов от всего количества выпускаемых квардцевых часов с аналоговой индикацией характеризуются отказами в работе у потребителя в силу того, что при необлагоприятных стечениях условий и обстоятельств моменты вращения и торможения становятся соизмеримы, т.е. минимальное значение отношения становится значительно меньше (3-5).
Цель изобретения - повышение надежности контроля часов за счет отбраковки часов с минимальным значением отношения и тем самым снижение поступления некачественных часов к потребителю.
Данная цель достигается за счет того, что в способе контроля кварцевых злектрон- А15%1 ехаПйческих часов с шаговым двигателем путем воздействия на них магнитного поля параллельно плоскости циферблата геометрическую ось обмотки шагового двигателя ориентируют вдоль вектора напряженности магнитного поля и устанавливают обмотку в заданном угловом положении в пространстве относительно ее оси, запитывают часы внешним постоянным напряжением заданной величины, контролируют ток потребления шагового двигателя, при этом часы периодически поворачивают вокруг их геометрической оси на 180° между импуль0 сами тока потребления часов, останавливая в положениях воздействия на шаговый двигатель тормозящего усилия со стороны внешнего магнитного поля, фиксируют мо- We riT времени, показываемый часами, после
5 чего по току потребления шагового двигателя в течение одного оборота часового колеса следят за отработкой шага двигателем при подключенном к нему механизме часов и в случае отсутствия неотработки шага за этот
0 период увеличивают значение напряженности магнитного поля на заданную величину и повторяют слежение за отработкой шага в течение следующего оборота часового колеса. Уазанную последовательность увеличе5 ния значения напряженности и слежения за отработкой заканчивают при появлении неотработки шага, при которой фиксируют значение напряженности магнитного поля, затем переводят шаговый двигатель в ре0 жим холостого хода путем изъятия из часов передаточного колеса и повторяют вышеописанный процесс, при этом фиксируют напряженность, вызвавшую неотработку шага, после чего определяют параметр, ха5 растеризующий качество часов как отношение момента вращения шагового двигателя к моменту сопротивления механизма часов через отношение зафиксированного значения напряженности магнитного поля в ре0 жиме холостого хода к разности значений напряженности магнитного поля, соответ ственно зафиксированных при работе шагового двигателя в режиме холостого хода и с нагрузкой, при этом начальное заданное
5 значение напряженности магнитного поля устанавливают равным 15 орстед, значение напряженности магнитного поля периодически изменяют на шаг, равный 0,5-1,0 эрстед, периодическим поворотом часов на
0 180° управляют имульсами тока потребле ния обмотки шагового двигателя путем их
усиления и задержки на время, равное 0,50,7 периода следования импульсов, начиная
с момента появления импульса, измененно5 го тормозящим воздействием магнитного поля, изменяют заданное положение часов в пространстве относительно геометрической оси обмотки шагового двигателя и при каждом положении определяют отношение момента вращения шагового двигателя к
моменту сопротивления механизма часов. часы периодически поворачивают на 180° в одном направлении по часовой и против часовой стрелки, контроль часов производят в ускоренном технологическом режиме работы, значение напряжения для электропитания часов выбирают в диапазоне 1,45- 1,60 в.
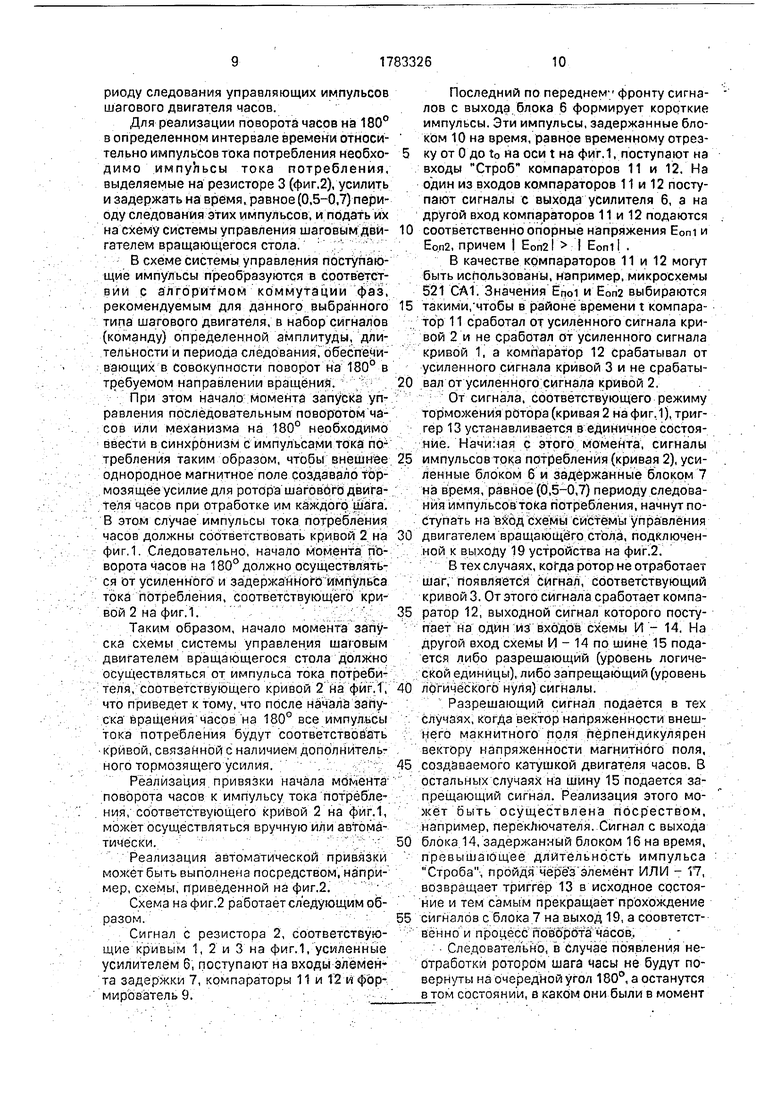
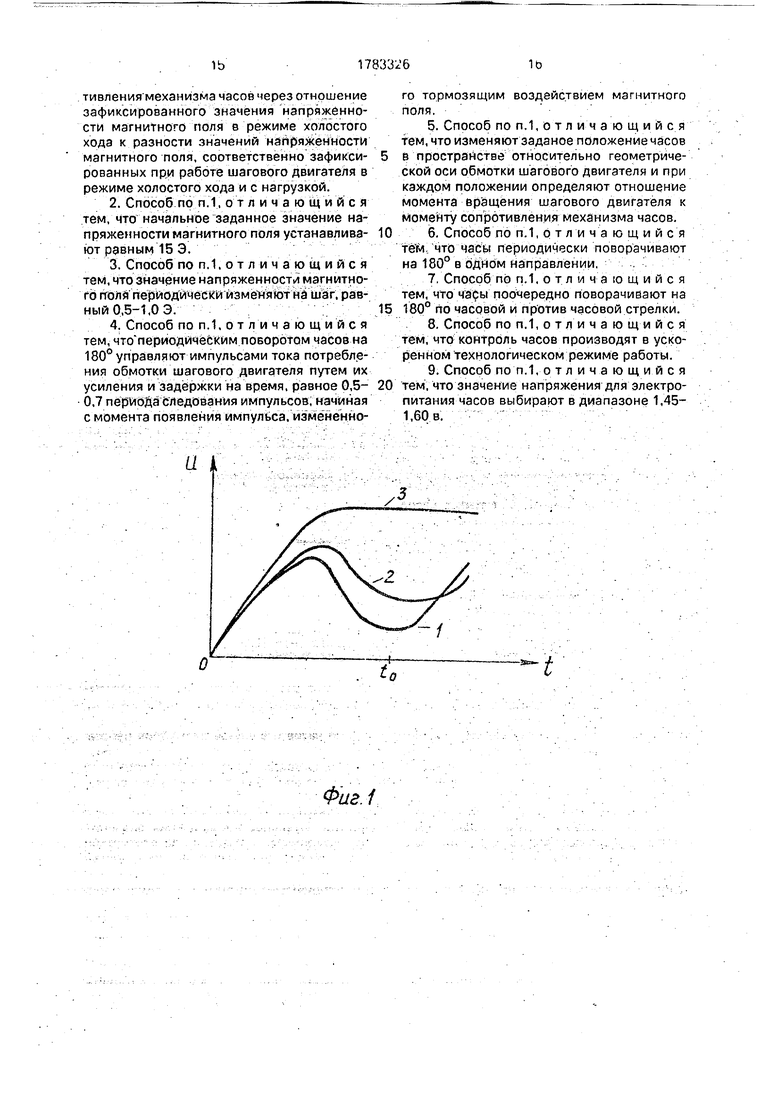
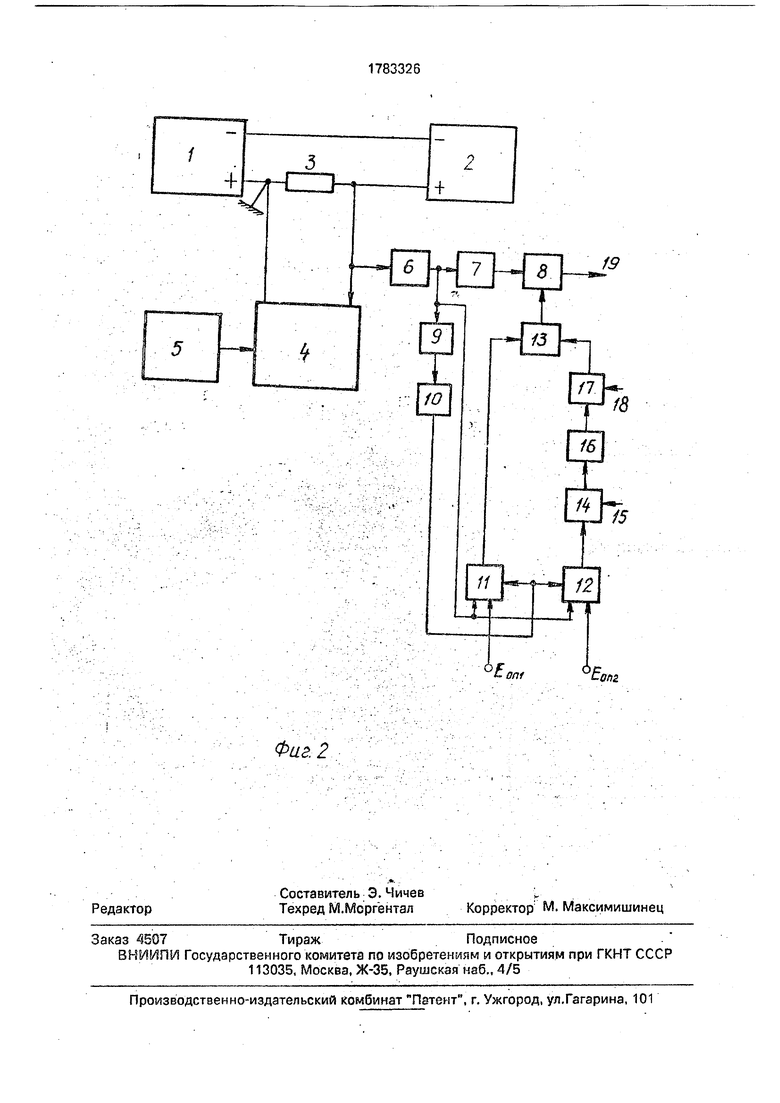
На фиг.1 изображены формы импульса тока потребления часов, питаемых от внешнего источника напряжения в условиях воздействия на часы внешнего однородного магнитного поля; на фиг 2 - функциональная схема одного из возможных вариантов реализации способа.
На фиг 1 форма импульса тока потребления - кривая 1 соответствует случаю, когда внешнее однородное магнитное поле, воздействующее на часы, является ускоряющим при отработке шага ротором шагового двигателя.
Кривая 2 соответствует случаю, когда внешнее однородное магнитное поле, воздействующее на часы, является тормозящим при отработке шага ротором шагового двигателя.
Кривая 3 соответствует случаю, когда внешнее магнитное однородное поле является тормозящим при отработке шага ротором, но ротор при этом не смог отработать шаг. т.е. произошел сбой в работе шагового двигателя
Схема на фиг.2 содержит внешний источник питания 1,часы 2, резистор 3,осциллограф 4, генератор 5, усилитель 6,элемент или линию задержки 7, схему И 8, формирователь 9, элемент или линию задержки 10, компараторы 11 и 12, триггер R-S-типа 13, схему И 14, элемент или линию задержки 16, схему ИЛИ 17, входы управления 15 и 18, выход 19.
Сущность изобретения состоит в следующем.
У часов снимают крышку и производят изъятие из часов батарейки. После этого для электропитания часов используют подачу напряжения питания определенного значения от внешнего источника постоянного тока. Подачу питания можно осуществить посредством, например, имитатора батарейки, представляющего собой полый металлический стакан с электрически изолированной от него крышкой. Внешний вид имитатора батарейки повторяет форму батарейки для данных часов.
Крышка и корпус стакана соединяются посредством тонких проводов с внешним источником питания через резистор с сопротивлением в несколько десятков ом. Для закрывания часов может быть использована
аналогичная крышка, в которой просверте но отверстие для проводов.
Имитатор вставляют в гнездо для батарейки, закрепляют его и устанавливают оп- 5 ределенное напряжение на внешнем источнике питания, лежащее в пределах 1,45-1,60 В.
Замена батарейки на внешний источник питания, у которого можно регулировать на0 пряжение в пределах 1,45-1,60 В позволяет определять отношение моментов во всем диапазоне рабочих напряжений питания часов, нормируемых стандартом на часы. Затем часы или механизм помещают в
5 зону действия внешнего однородного магнитного поля. Такое поле обеспечивается при размещении часов внутри соленоида, через катушку которого пропускают постоянный ток такой величины, чтобы внутри
0 соленоида создавалось требуемое значение напряженности магнитного поля.
Часы ориентируют в магнитном поле так, чтобы направление между цифрами 6 и 12 или цифрами 3 и 9 всегда было парал5 лельно вектору напряженности магнитного поля при любом произвольном положении часов в пространстве относительно оси, совпадающей с направлением вектора напряженности магнитного поля или, иными
0 словами, относительно оси, совпадающей с направлением между цифрами 6 и 12 или 3 или 9.
Задавая произвольное положение часов или механизма в пространстве - цифер5 блатом вниз или вверх для направлений между 6 и 12 и между 3 и 9, цифовой 9 вниз и вверх для направления между цифрами 6 и 12, цифрой 12 вниз и вверх для направления между цифрами 3 и 9 можно определить
0 отношение моментов для всех возможных положений часов в пространстве.
Обеспечение параллельности вектора напряженности магнитного поля с направлением между цифрами 6 и 12 или цифрами
5 3 и 9 обусловлено следующим. Размещение шагового двигателя в часах у различных часов разпично. У одних часов ось омботки шагового двигателя параллельна направлению между цифрами 6 и 12 на циферблате.
0 У других часов ось обмотки параллельна направлению между цифрами 3 и 9 на циферблате.
В первом случае внешнее поле является ускоряющим. Оно увеличивает поле, вызы5 вающее проворот ротора на 180°, что ведет к возрастанию момента вращения.
Во втором случае внешнее поле является тормозящим.
В тех случаях, когда ось обмотки шагового двигателя перпендикулярна вектору
напряженности внешнего магнитного поля, внешнее поле не оказывает влияния на внутреннее магнитное поле, воздействующее на покоящийся ротор. Здесь появление дополнительного тормозящего усилия, приводящего к уменьшению момента вращения, связано с воздействием внешнего магнитного поля на вращающийся ротор шагового двигателя. Отмстим, что в рассматриваемом случае внешнее магнитное поле для однбго состояния покоющегося ротора является тормозящим или ускоряющим, а для противоположного состояния ротора соответственно ускоряющим или тормозящим, т.к. внешнее поле в процессе последовательной отработки ротором шага вызывает чередующиеся через раз тормозящиеся и усокряющиеся усилия для ротора.
Согласно п. 2.8 ГОСТ 26272-84 часы должны выдерживать воздействия магнитного поля напряженностью не менее (1600- 400) А/М. При этом в часах должны отсутствовать сбои в работе, обусловленные воздействием поля. Исходя из этого, первоначальное значение напряженности внешнего магнитного Однородного поля устанавливается равным минимальному значению напряженности, указанному в стандарте на часы.
По ГОСТу оно задано равным 15 эрстед, поэтому в качестве примера в предлагаемом способе фигурирует конкретное значение 15 эрстед.
Контроль формы импульсов тока потребления часов или механизма, а также запоминание формы может быть осуществлено с помощью запоминающего осциллографа.
Сигнал о форме импульса тока потребления поступает на вход осциллографа с резистора, включенного, например, между плюсовой шиной внешнего источника питания и плюсовой шиной питания часов.
При контролеформы импульсовтока потребления в условиях воздействия магнитного поля для случая нормального функционирования шагового двигателя часов, на экране осциллографа будут появляться последовательно через раз кривая 1 и кривая 2, соответствующие вызываемому внешним магнитным полем эффектом ускорения и торможения.
Показанные на фиг.1 кривые 1 и 2 соответствуют определенному значению напряженности магнитного поля. С увеличением значения напряженности кривые 1 и 2 удаляются друг от друга, а с уменьшением напряженности наоборот приближаются друг к другу и при нулевом значении напряженности сливаются в одну кривую. Эта кривая расположена между кривыми 1 и 2.
Для обеспечения для каждого шага ротора дополнительно тормозящего усилия в
условиях воздействия однонаправленного внешнего магнитного поля необходимо осуществлять поворот часов в пространстве на 180° относительно оси, перпендикулярной одновременно к направлениям между циф0 рами 6 и 12, 3 и 9 и проходящей через точку их пересечения.
Здесь возможны два варианта обес- печ ения для каждого шага ротора двигателя дополнительного тормозящего
5 воздействия. Один из них включает в себя последовательный от шага к шагу однонаправленный (например, по часовой или против часовой стрелке) поворот часов на 180°, т.е. угол поворота часов относительно
0 первоначального исходного положения часов при размещении их в зоне действия внешнего магнитного поля будет изменяться от шага к шагу на величину гг л, где , 2.3....
5 Другой вариант включает в себя последовательное чередование поворота на 180° в одном направлении (например, по часовой стрелке) при -ом шаге и повороте на 180° в обратном положении (например, против ча0 совой стрелки) при последующем l+1-ом шаге.
В этом случае угол поворота часов, отсчитываемого от первоначального исходного положения часов при помещении их в
5 зону действия магнитного поля, будет колебаться от 0° для одного шага, до 180° для последующего шага.
Для отработки вращающимся столом шага в 180° необходимо обеспечить подачу
0 управляющих импульсов на шаговый двигатель вращающегося стола.
Представляется очевидным, что поворот часов на 180° должен осуществляться в промежутке между двумя управляющими
5 импульсами, поступающими на обмотку шагового двшателя часов. При этом, с одной стороны, поворот часов должен осуществляться после окончания всех переходных процессов в шаговом двигателе часов, а с
0 другой стороны, к приходу следующего управляющего импульса на обмотку двигателя часов, часы должны быть повернуты на 180° и должны закончиться все переходные процессы г шаговом двигателе вращающего
5 стола.
Обоим требованиям удовлетворяет режим, когда поворот часов на 180° осуществ- .ляется в интервале времени, равном (0,5-0,7) периоду следования импульсов то- ка потребления часов, что равносильно периоду следования управляющих импульсов шагового двигателя часов.
Для реализации поворота часов на 180° в определенном интервале времени относительно импульсов тока потребления необхо- димо импульсы тока потребления, выделяемые на резисторе 3 (фиг.2), усилить и задержать на время, равное (0,5-0,7) периоду следования этих импульсов, и подать их на схему системы управления шаговым дви- гателем вращающегося стола.
В схеме системы управления поступающие импульсы преобразуются в соответствии с алгоритмом коммутации фаз, рекомендуемым для данного выбранного типа шагового двигателя, в набор сигналов (команду) определенной амплитуды, длительности и периода следования, обеспечивающих в совокупности поворот на 180° в требуемом направлении вращения.
При этом начало момента запуска управления последовательным поворотом часов или механизма на 180° необходимо ввести в синхронизм с импульсами тока потребления таким образом, чтобы внешнее однородное магнитное поле создавало тормозящее усилие для ротора шагового двигателя часов при отработке им каждого шага. В этом случае импульсы тока потребления часов должны соответствовать кривой 2 на фиг,1. Следовательно, начало момента поворота часов на 180° должно осуществляться от усиленного и задержанного импульса тока потребления, соответствующего кривой 2 на фиг.1.
Таким образом, начало момента запуска схемы системы управления шаговым двигателем вращающегося стола должно осуществляться от импульса тока потребителя, соответствующего кривой 2 на фиг.1, что приведет к тому, что после начала запуска вращения часов на 180° все импульсы тока потребления будут соответствовать кривой, связанной с наличием дополнительного тормозящего усилия.
Реализация привязки начала момента поворота часов к импульсу тока потребления, соответствующего кривой 2 на фиг.1, может осуа(ествляться вручную или автоматически.
Реализация автоматической привязки может быть выполнена посредством, например, схемы, приведенной на фиг.2.
Схема на фиг.2 работает следующим образом.
Сигнал с резистора 2, соответствующие кривым 1, 2 и 3 на фиг.1, усиленные усилителем 6, поступают на входы элемента задержки 7, компараторы 11 и 12 и формирователь 9.
Последний по переднем фронту сигналов с выхода блока 6 формирует короткие импульсы. Эти импульсы, задержанные блоком 10 на время, равное временному отрезку от 0 до to на оси t на фиг. 1, поступают на входы Строб компараторов 11 и 12. На один из входов компараторов 11 и 12 поступают сигналы с выхода усилителя 6, а на другой вход компараторов 11 и 12 подаются соответственно опорные напряжения Еоп1 и Е0п2, причем I Eon2J I Eonil .
В качестве компараторов 11 и 12 могут быть использованы, например, микросхемы 521 СА1. Значения ЕПо1 и ЕОП2 выбираются такими, чтобы в районе времени t компаратор 11 сработал от усиленного сигнала кривой 2 и не сработал от усиленного сигнала кривой 1, а компаратор 12 срабатывал от усиленного сигнала кривой 3 и не срабатывал от усиленного сигнала кривой 2.
От сигнала, соответствующего режиму торможения ротора (кривая 2 на фиг.1), триггер 13 устанавливается в единичное состояние. Начиная с этого момента, сигналы импульсов тока потребления (кривая 2), усиленные блоком 6 и задержанные блоком 7 на время, равное (0,5-0,7) периоду следования импульсов тока потребления, начнут поступать на вход схемы системы управления двигателем вращающего стола, подключенной к выходу 19 устройства на фиг.2.
В тех случаях, когда ротор не отработает шаг, появляетсй сигнал, соответствующий кривой 3. От этого сигнала сработает компаратор 12, выходной сигнал которого поступает на один из входов схемы И - 14. На другой вход схемы И - 14 по шине 15 подается либо разрешающий (уровень логической единицы), либо запрещающий (уровень логического нуля) сигналы.
Разрешающий сигнал подается в тех случаях, когда вектор напряженности внешнего макнитного поля перпендикулярен вектору напряженности магнитного поля, создаваемого катушкой двигателя часов. В остальных случаях на шину 15 подается запрещающий сигнал. Реализация этого может быть осуществлена посреством, например, переключателя. Сигнал с выхода блока 14, задержанный блоком 16 на время, превышающее длительность импульса Строба, пройдя чере з элемент ИЛИ - 17, возвращает триггер 13 в исходное состояние и тем самым прекращает прохождение сигналов с блока 7 на выход 19, а соовтетст- венно и процесс повброта часов.
Следовательно, в случае появления неотработки ротором шага часы не будут повернуты на очередной угол 180°, а останутся в том состоянии, е каком они были в момент
сбоя в работе часов. Это позволяет обеспечить только режим торможения для ротора под воздействием внешнего магнитного поля и в случае нарушения нормального функционирования шагового двигателя часоз.
Для прекращения поворота часов в любой момент времени служит шина 18, на которую путем подачи сигнала, например, от кнопки, обеспечиается установка триггера 13 в нулевое состояние.
Фиксируют текущее время, показываемое часами или механизмом и приступают к определению значения напряженности магнитного поля, соответствующего максимальному сопротивлению нагрузки шагового двигателя часов. Это осуществляют следующим образом После того, как ус- тановили первоначальное значение напряженности магнитного поля и осуществили запуск поворота часов, начинают проводить контроль и запоминание факта отработки и неотработки шага ротора посредством селекции по форме запомненных импульсов тока потребления. Появление и запоминание на экране осциллографа кривой 2 свидетельствует о факте отработкм ротором шага. Наоборот, появление и запоминание на экране осциллографа кривой 3 свидетельствует о факте неотработки ротором шага.
Если в течение одного оборота часового колеса часов или механизма будет отсутствовать факт неотработки шага (т.е. появление кривой 3), то это свидетельствует о том, что общий момент сопротивления, противодействующего моменту вращения шагового двигателя и равною сумме дополнительного тормозящего усилия, обусловленного внешним магнитным полем, и момента сопротивления колесной системы, изменяющегося в широких пределах в течение одного оборота часового колеса, не достаточен для останова ротора.
Факт совершения часовым колесом одного оборота определяется следующим образом. От значения зафиксированного текущего времени, показываемого часами или механизмом, необходимо отсчитать 12 ч.
Пусть было зафиксировано текущее время часов или механизма в начальный момент контроля, например, 9 ч 16 мин Следовательно, при значении текущего времени часов или механизма, равным 21 и 16 мин, часовое колесо совершит один оборот и на этом заканчивается контроль в отношении отсутствия факта неотработки ротора шага в течение одного оборота часового колеса. После этого увеличивают на определенную величину, например на 0,5 эрстеда.
напряженность магнитного поля и повторяют контроль факта наличия или отсутствия неотработки шага ротором в течение одного оборота часового колеса.
Если при новом значении напряженности также не будет зафиксирован факт неотработки ротором шага в течение времени оборота часового колеса, то снова увеличивают на ту же самую определенную величину напряженность поля и повторяют контроль в отношении отсутствия факта иеотработки шага ротором в течение времени одного оборота часового колеса. Этот процесс последовательного увеличения напряженности поля на определенную величину и контроля форм тока потребления при каждом новом значении будет продолжаться до тех пор, пока появится факт неотработки ротором шага.
Если при первоначальном значении напряженности магнитного поля, например, при 15 эрстедах, в течение времени одного оборота часового колеса появится неотработка ротором шага, то в этом случае процесс определения максимального тормозящего усилия будет протекать следующим образом
Фиксируют текущее время, показываемое часами или механизмом. Пусть сбой в
работе часов произошел, например, при 12 ч 47 мин, те. относительно приведенного выше в качестве примера начала контроля 9 ч 16 мин часы или механизм функционировали без сбоя при данном тормозящем усилии только в течение 3 ч 31 мин, вместо необходимых 12ч.
После этого снижают на определенную величину (например, 0,5 или 1,0 эрстед) напряженность поля и повторяют контроль
факта начилия или отсутствия неотработки ротором шага в течение времени одного оборота часового колеса При этом в качестве мерила времени одного оборота часового колеса принимается отрезок времени длительностью в 12 ч, отсчитываемый относительно зафиксированного текущего времени, при котором произошел сбой.
Если при новом значении напряженности опять будет зафиксирован факт неотработки ротором шага в теение времени оборота часового колеса, то ее снова уменьшают на ту же самую определенную величину,
Этот процесс последовательного уменьшения напряженности поля на определенную величину и контроля форм тока потребления при каждом новом значении напряженности будет продолжаться до тех пор, пока в течение времени одного оборота
M t 1 -. i Mf-i ip{ , tf.
часового колеса будет отсутствовать неотработка ротором шага.
После определения значения напряженности, соответствующей максимальному тормозящему усилию в режиме работы шагового двигателя под нагрузкой, шаговый двигатель часов переводят в режим холостого хода путем изъятия из часов передаточного колеса, т.е. нагрузка шагового двигателя, представляющая собой колесную систему, отключается. Затем повторяют все вышеописанное для часов или механизма с шаговым двигателем в режиме нагрузки.
При этом определяют и запоминают значение напряженности магнитного поля, соответствующее максимальному тормозящему усилию, противодействующему вращению ротора, при котором обеспечивается неотработка шага.
Предположим, что неотработка шага ротора в режиме холостого хода произошла при напряженности, например, 24,5 эрстед, под нагрузкой при 17 эрстедах.
Отношение момента вращения шагового двигателя к максимальному моменту сопротивления всей колесной системы часов или механизма определяется как отношение значения напряженности поля, зафиксированного при контроле шагового двигателя в режиме холостого хода, к разности значений напряженности поля, соответственно зафиксированных при контроле работы шагового двигателя без нагрузки и с нагрузкой, т.е. отношение равно
24,5
-3,27.
24,5 - 17,0
Таким образом, предлагаемый способ позволяет определить отношение моментов для всех возможных сочетаний зацеплений зубьев колесной системы как при любом напряжении питания и при любом положении часов в пространстве (например, циферблатом вверх, вниз и т.д).
Следовательно, всегда можно определить минимальное значение отношения моментов для данных часов, соответствующее экстремальным условиям эксплуатации.
Для ускорения процесса определения отношения моментов можно контроль формы тока потребления проводить в технологическом режиме ускоренной подачи импульсов управления шаговым двигателем Этот режим предусмотрен для некоторых типов электронных блоков часов. Для реализации его необходимо обеспечить выполнение последовательности операций, указанных в инструкции по эксплуатации
часов. Кроме того, ускоренный режим рабо ты часов можно осуществить посредством перевода кварцевого генератора часов из режима автоколебательного в режим запу- 5 сУа от внешнего генератора.
Для этого достаточно ко входу кварцевого генератора подключить выход внешнего генератора. Частота сигналов внешнего генератора выбирается в пределах 10-40
0 Гц.
Технико-экономический эффект предлагаемого способа состоит в том, что это позволит повысить качество выпускаемых часов и уменьшить возврат потребителями
5 дефектных часов.
Формула изобретения 1. Способ контроля кварцевых электронно-механических часов с шаговым двигателем путем воздействия на них
0 магнитного поля параллельно плоскости циферблата, отличающийся тем, что, с целью повышения надежности контроля, геометрическую ось обмотки шагового двигателя ориентируют вдоль вектора
5 напряженности магнитного поля и устанавливают обмотку в заданном угловом положении в пространстве относительно ее оси, запитывают часы внешним постоянным напряжением заданного значения, контроли0 руют ток потребления шагового двигателя, при этом часы периодически поворачивают вокруг их геометрической оси на 180° между импульсами тока потребления часов, останавливая в положениях воздействия на
5 шаговый двигатель тормозящего усилия со стороны внешнего магнитного поля, фиксируют момент времени, показываемы часами, после чего по току потребления шагового двигателя в течение одного оборота
0 часового колеса следят за отработкой шага двигателем при подключенном к нему механизме часов и в случае отсутствия неотработки шага за этот период увеличивают значение напряженности магнитного поля
5 на заданное значение и повторяют слежение за отработкой шага в течение следующего оборота часового колеса, указанную последовательность увеличения значения напряженности и слежения за отработкой
0 заканчивают при появлении неотработки шага, при которой фиксируют значение напряженности магнитного поля, затем переводят шаговый двигатель в режим холостого хода путем изъятия из часов передаточного
5 колеса и повторяют вышеописанный процесс, при этом фиксируют напряженность, вызвавшую неотработку шага, после чего определяют параметр, характеризующий качество часов как отношение момента вращения шагового двигателя к моменту сопротивления механизма часов через отношение зафиксированного значения напряженности магниТного поля в режиме холостого хода к разности значений напряженности магнитного поля, соответственно зафиксированных при работе шагового двигателя в режиме холостого хода и с нагрузкой.
2.Способ по п. 1,отличающийся тем, что начальное заданное значение напряженности магнитного поля устанавливают равным 15 Э.
3.Способ по п.1,отличающийся тем, что значение напряженности магнитного поли периодически изменяют на шаг, равный 0,5-1,03.
4.Способ по п. 1,отличающийся тем, что периодическим поворотом часов на 180° управляют импульсами тока потребления обмотки шагового двигателя путем их усиления и задержки на время, равное 0,5- 0,7 периода следования импульсов, начиная с момента появления импульса, измененного тормозящим воздействием магнитного поля.
5. Способ по п.1,отличающийся тем, что изменяют заданое положение часов
в пространстве относительно геометрической оси обмотки шагового двигателя и при каждом положении определяют отношение момента вращения шагового двигателя к моменту сопротивления механизма часов.
6. Способ по п.1,отличающийся тем что часы периодически поворачивают на 180° в одном направлении,
7 Способ по п. 1,отличающийся тем, что часы поочередно поворачиЁают на
180° по часовой и против часовой стрелки.
8.Способ поп.1,отлича ющийся тем, что контроль часов производят в ускоренном технологическом режиме работы.
9.Способ по п. 1,отличающийся тем, что значение напряжения для электропитания часов выбирают в диапазоне 1,45- 1,60 в.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля кварцевых электронно-механических часов с шаговым двигателем | 1990 |
|
SU1767371A1 |
| Способ контроля устойчивой отработки шага однофазным шаговым двигателем с активным ротором | 1989 |
|
SU1683168A1 |
| Способ управления однофазным шаговым двигателем и устройство для его осуществления | 1980 |
|
SU928593A1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1997 |
|
RU2178940C2 |
| ЭЛЕКТРОПРИВОД ШАГОВЫЙ | 2012 |
|
RU2497269C1 |
| ИСПОЛНИТЕЛЬНЫЙ ПРИВОД КЛАПАНА | 2016 |
|
RU2721827C2 |
| Способ контроля качества колесной системы кварцевых электронно-механических часов и устройство для его осуществления | 1986 |
|
SU1422217A1 |
| Шаговый электродвигатель | 1979 |
|
SU845235A1 |
| Способ управления шаговым электродвигателем | 1974 |
|
SU515237A1 |
Использование: оценка качества разрабатываемых и выпускаемых промышленных часов. Сущность изобретения: геометрическую ось обмотки шагового двигателя часов ориентируют вдоль вектора напряженности воздействующего на них постоянного магнитного поля, и устанавливают часы в заданном угловом положении относительно этой оси. Часы запитывают внешним постоянным напряжением заданной величины и устанавливают значение воздействующей на них напряженности. Часы периодически поворачивают вокругих геометрической оси на 180° между импульсами тока потребления, останавливая в положениях воздействия на шаговый двигатель тормозящего усилия со стороны внешнего магнитного поля. С зафиксированного момента времени по току потребления в течение одного оборота часового колеса следят за отработкой шага двигателем при подключенном к нему механизме часов. В случае отсутствия неотработки шага за этот период , - - + увеличивают значение напряженности и повторяют слежение за отработкой шага в течение следующего оборота часового колеса. Указанную последовательность заканчивают при появлении неотработки шага, при которой фиксируют значение напряженности магнитногб поля. Затем изымают из часов передаточное кол есо и повторяют вышеописанный процесс в режиме холостого хода. В этом режиме также фиксируют напряженность, вызвавшую неотработку шага. Качество часов оценивают по отношению зафиксированного значения напряженности магнитного поля в режиме холостого хода к разности значений напряженности магнитного поля, соответственно зафиксированных при работе шагового двигателя в режиме холостого хода и с нагрузкой. 8 з.п.ф-лы, 2 ил. сл 00 ы ю о
Фиг 1
Летt
Фаг. 2
19
6f
от
°fi
am
| ВСЕСОЮЗНАЯ | 0 |
|
SU371557A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ГОСТ 26272-84 Часы электронно-механические кварцевые наручные и карманные | |||
| М.: Изд-во стандартов, 1988 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
