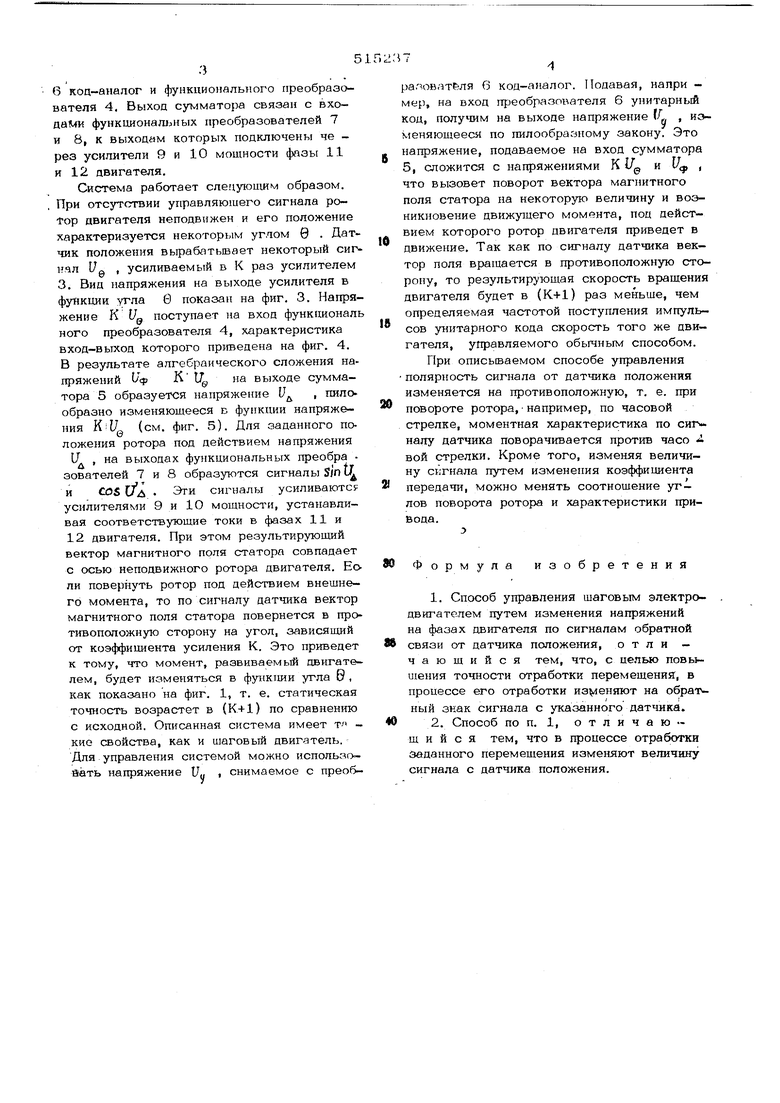
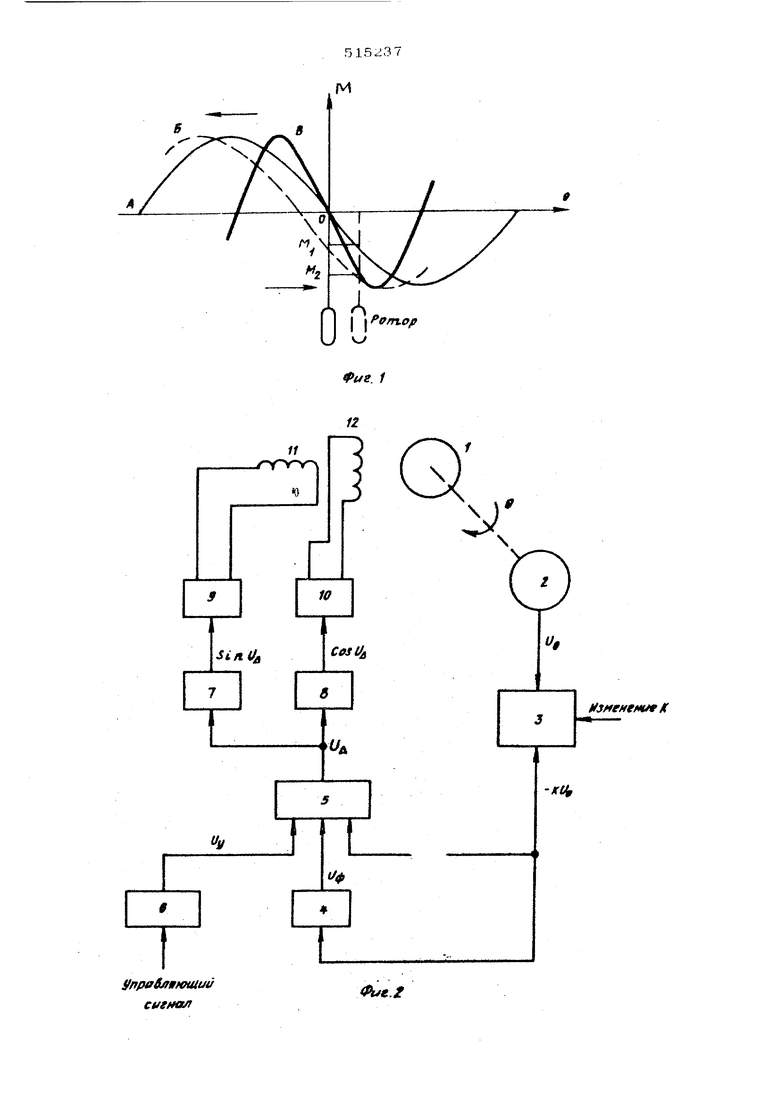
Известен способ управления шаговьгм электродвигателем путем изменения напря жений на фазах двигателя по сигналам об ратной связи от датчика положения. В предлагаемом изобретении, с целью повышения точности отработки перемещения, в процессе его отработки изменяют на обратный знак сигнала с датчика положения. Кроме того, в процессе отработки за данного перемещения изменяют величину сигнала с датчика положения. На фиг. 1 изображены характеристики статического синхронизирующего момента; на фиг. 2 - структурная схема системы, реализующей способ; на фиг. 3, 4 и 5 диаграммы сигналов на отдельных элементах системы. На фиг. 1 показано влияние изменения знака сигнала обратной связи с датчика положения на статический синхронизирующий момент. Кривая А представляет собой угловую характеристику шагового двигателя без обратной связи. Если ротор пере ме,стить в новое положение (показано uyKii тиром), тогда под действием сигнала датчика угловая характеристика переместится в положение Б (на фиг. 1 иллюстрируется случай, когда коэффициент передачи равен единице) и на ротор двигателя будет дей ствовать момент М , вдвое превышающий момент М , Моментная характеристика в этомслучае изображена кривой В на фиг. 1, а удельный синхронизирующий момент увеличится в два раза по сравнению с характе-i ристикой А. УдельньШ синхронизирующий момент может быть значительно увеличен путем повышения коэффициента передачи датчика положения. На фиг. 2: пр1геедена структурная схёК(а следящей системы, реализующей описьшаемый способ. На валу шагового двигателя 1 установлен аналоговый датчик 2. положения, выход которого подключен к усилителю 3 с регулируемым коэффициентом усиления К. Выход усилителя-соединен со входами функционального преобразователя 4 и сумматора 5. К входам сумматора под - соединены также выход преобразователя 6 коц-аналог и функционального преобразователя 4. Выход сумматора связан с вхо- функционашдных преобразователей 7 и 8, к выходам которых подключены че рез усилители 9 и 10 мощности фазы 11 и 12 двигателя. Система работает следующим образом. , При отсутствии управляющего сигнала ротор двигателя неподвижен и его положение характеризуется некоторым углом 0 . Датчик положения вырабатьюает некоторый сиг нал UQ , усиливаемый в К раз усилителем 3, Виц напряжения на выходе усилителя в функции угла 6 показан на фиг. 3. Напряжение К Ug поступает на вход функшонал ного преобразователя 4, характеристика вход-выход которого прггоедена на фиг. 4. В результате алгебраического сложения напряжений К t/g, на выходе сумматора 5 образуется напряжение U , пилообразно изменяющееся в функции напряжения К if/ (см. фиг. 5). Для заданного положения ротора под действием напряжения и , на выходах функциональных преобра зователей 7 и 8 образуются сигналы5ю11 и COS Цд . Эти сигналы усиливаются усилителями 9 и 10 мощнос1-и, устанавливая соответствующие токи в фазах 11 и 12 двигателя. При этом результируюишй вектор магнитного поля статора совпадает с осью неподвижного ротора двигателя. Ее ли повернуть ротор под действием внешнего момента, то по сигналу датчика вектор магнитного поля статора повернется в противоположную сторону на угол, зависящий от коэффициента усиления К. Это приведет к тому, что момент, развиваемый двигателем, будет изменяться в функ1ши угла Э , как показано на фиг. 1, т. е. статическая точность возрастет в (K-t-1) по сравнению с исходной. Описанная система имеет т кие свойства, как и шаговый двигатель. Для управления системой можно иснользоаать напряжение Уц i снимаемое с преобраповатйля 6 код-аналог. Подавая, напри мер, на вход преобразователя 6 унитарный код, получим на выходе напряжение IL , изменяющееся по пилообразному закону. Это напряжение, подаваемое на вход сумматора 5, сложится с напряжениями К 1/ и , , что вызовет поворот вектора магнитного поля статора на некоторую величину и возникновение движущего момента, поц действием которого ротор двигателя приведет в движение. Так как по сигналу датчика вектор поля вращается в противоположную сторону, то результирующая скорость вращения двигателя будет в (К+1) раз меньше, чем определяемая частотой поступления импульсов унитарного кода скорость того же двигателя, управляемого обычным способом. При описываемом способе управления полярность сигнала от датчика положения изменяется на противоположную, т. е. при повороте ротора, например, по часовой стрелке, моментная характеристика по сигналу датчика поворачивается против часо вой стрелки. Кроме того, изменяя величину С1;гнала путем изменения коэффициента передачи, можно менять соотношение углов поворота ротора и характеристики привода. Формула изобретения 1.Способ управления шаговым электродвигателем путем изменения напряжений на фазах двигателя по сигналам обратной связи от датчика положения, о т л и чающийся тем, что, с целью повыишния точности отработки перемещения;, в процессе его отработки из иеняют на обратный знак сигнала с указанного датчика. 2.Способ по п. 1, отличающийся тем, что в процессе отработки Заданного перемещения изменяют величину сигнала с датчика положения.
В
ftfS. 1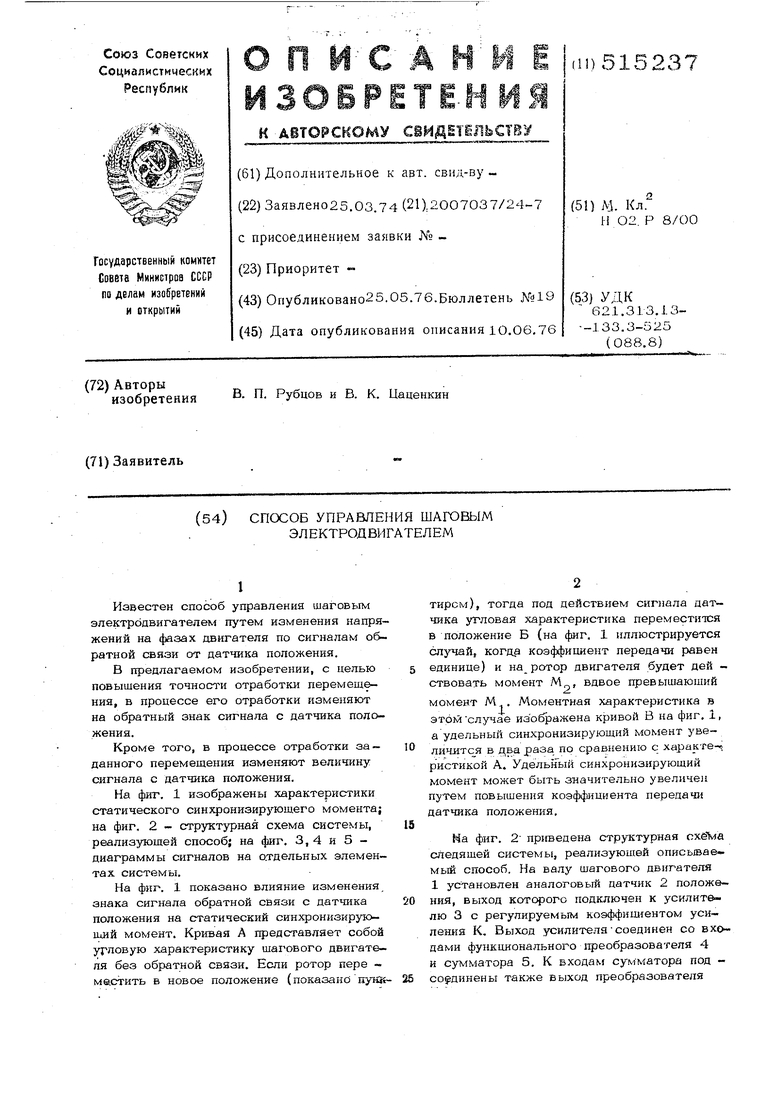
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления -фазным шаговым двигателем | 1977 |
|
SU738091A2 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для управления шаговым двигателем | 1976 |
|
SU738092A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Способ программного управления приводом | 1986 |
|
SU1403330A1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Замкнутый шаговый электропривод | 1988 |
|
SU1511840A2 |
Упраблшюший ct/effo/r
ЖЛУГ ЛЦМГ/
«./
Фиг.З
ФtJZ.
иф-цУв
Фиг
