ел
с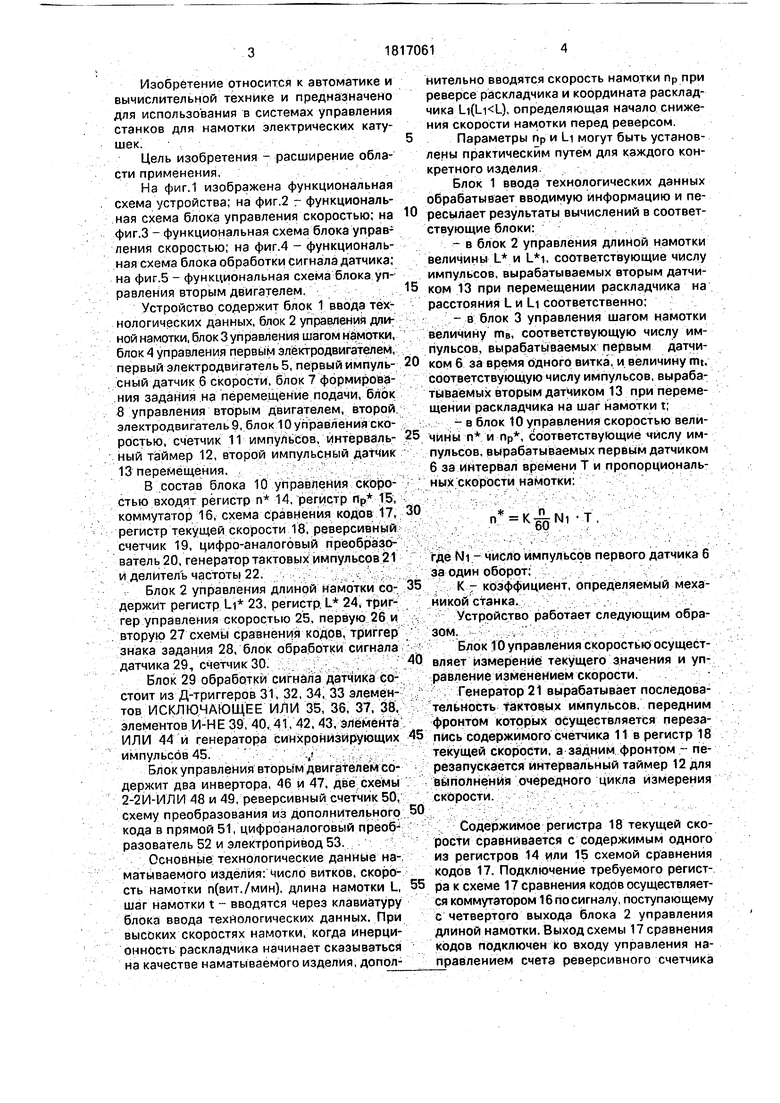
| название | год | авторы | номер документа |
|---|---|---|---|
| Намоточное устройство | 1981 |
|
SU994386A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| Устройство управления механизмом раскладки намоточного станка | 1982 |
|
SU1095254A1 |
| Устройство для программного управления бандажировочным станком | 1989 |
|
SU1725187A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Устройство для программного управления намоточным станком | 1980 |
|
SU881670A1 |
| Устройство для управления намоткой многослойных электрических катушек | 1985 |
|
SU1350096A1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для использовано в системах управления станков для намотки электрических катушек. Цель изобретения - расширение области применения. Устройство содержит блок 1 ввода технологических данных, блок 2 управления длиной намотки, блок 3 управления шагом намотки,блок 4 управления первым двигателем и сам двигатель 5 с первым импульсным датчиком 6, блок формирования задания на перемещение подачи 7, блок 8 управления вторым двигателем 9 и связанный с ним второй импульсный датчик 13, блок 10 управления скоростью, счетчик импульсов 11, интервальный таймер 12. Сущность изобретения состоит в том, что контроль скорости намотки и реального положения раскладчика позволяет в высокоскоростных станках путем снижения скорости намотки перед реверсом раскладчика избежать на- хлеста провода на краях катушки и, следовательно, повысить качество наматываемых изделий. 1 з.п.ф-лы. 5 ил.
00
XI о
ON
Фиг.1
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах управления станков для намотки электрических катушек
Цель изобретения - расширение области применения.
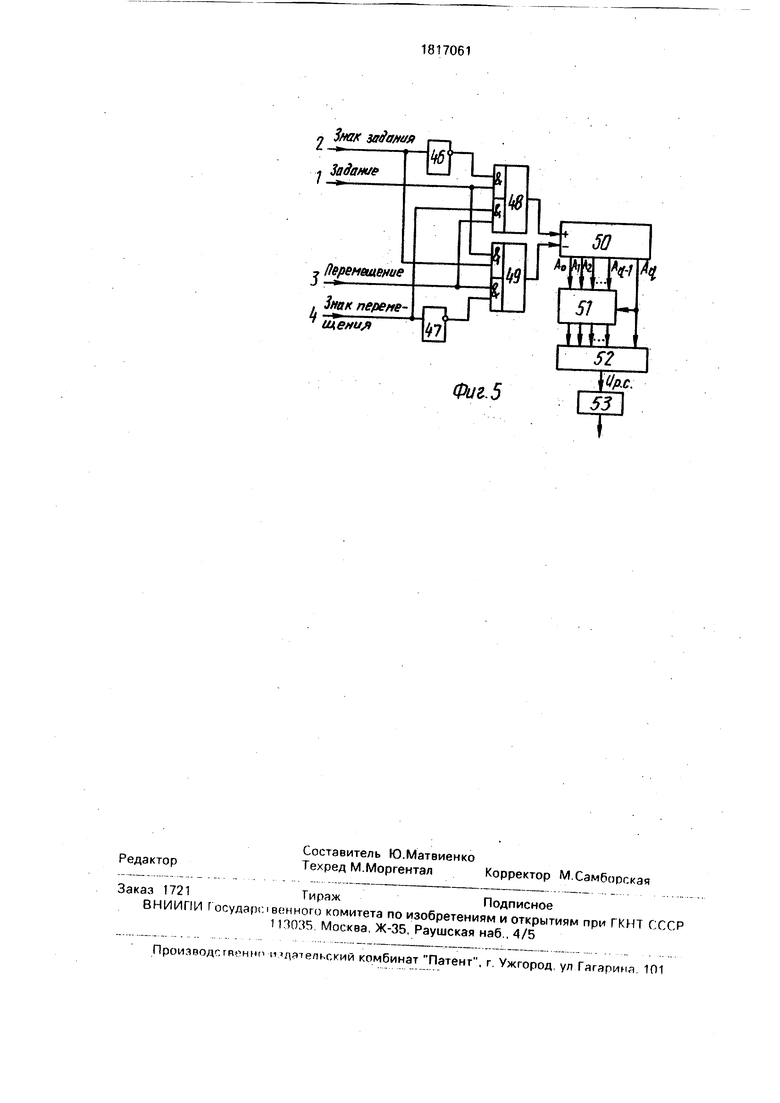
На фиг,1 изображена функциональная схема устройства; на фиг.2 г функциональная схема блока управления скоростью; на фиг.З - функциональная схема блока управления скоростью; на фиг.4 - функциональная схема блока обработки сигнала датчика; на фиг.5 - функциональная схема блока управления вторым двигателем,
Устройство содержит блок 1 ввода технологических данных, блок 2 управления длиной намотки, блок3 управления шагом намотки, блок 4 управления первым электродвигателем, первый электродвигатель 5, первый импуль- сный датчик б скорости, блок 7 формирования задания на перемещение подачи, блок 8 управления вторым двигателем, второй электродвигатель 9, блок10 управленийi ско- ростью, счетчик 11 импульсов, интёрваль- ный таймер 12, второй импульсный датчик 13 перемещения. . ,. . , : ; г
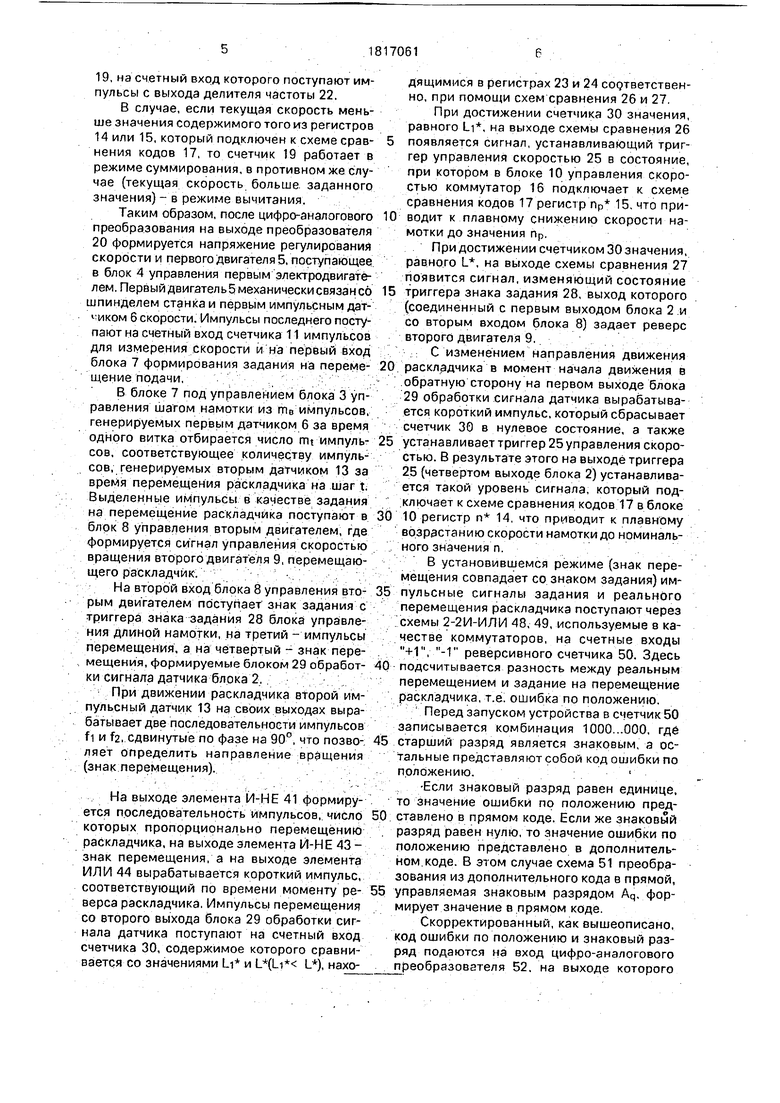
В состав блока 10 управления скоро- стью входят регистр п 14, регистр пр 15, коммутатор 16, схема сравнения кодов 17, регистр текущей скорости 18, реверсивный счетчик 19, цифро-аналоговый преобразователь 20, генератор тактовых импульсов 21 и делитель частоты 22. ;:-:; :.. -. луо,;
Блок 2 управления длиной намотки со- держит регистр Li 23, регистр L 24, триггер управления скоростью 25, первую 26 и вторую 27 схемы сравнения кбДрв, триггер знака задания 28, блок обработки сигнала датчика 29, счетчик 30. i; Л ;
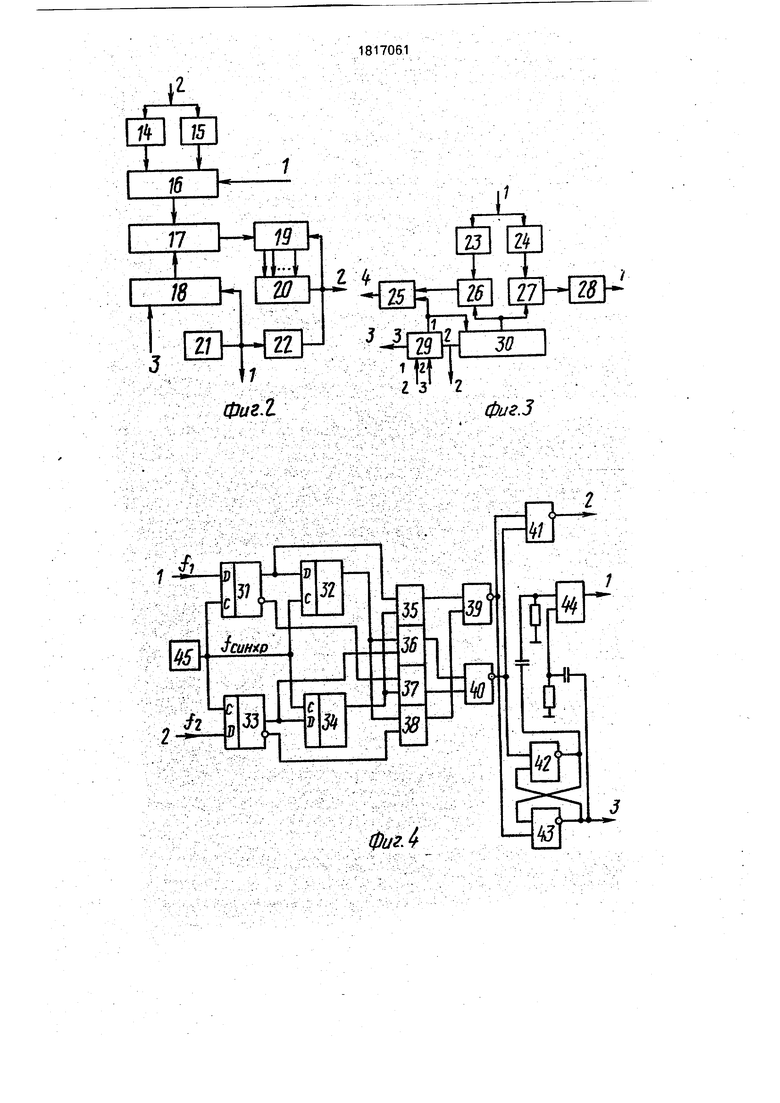
Блок 29 обработки сигнала Датчика состоит из Д-триггеров 31, 32, 34, 33 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 35, 36, 37, 38. элементов 1/I-HE 39, 40,41, 42,43; элемента ИЛИ 44 и генераторе синхронизирующих
импульсов 45. . . . :... . У-.- :
Блок управления вторымi двигателем со- держит два инвертора, 46 и 47, две схемы 2-2Й-ИЛИ 48 и 49, реверсивный счетчик 50, схему преобразования из дополнительного кода в прямой 51, цифроаналоговый преобЧ разователь 52 и электропривод 53.
Основные технологические данные наматываемого изделия: число витков, скорость намотки п(вит./мин), длина намотки L, шаг намотки t - вводятся через клавиатуру блока ввода технологических данных. При высоких скоростях намотки, когда инерционность раскладчика начинает сказываться на качестве наматываемого изделия, дополнительно вводятся скорость намотки пр при реверсе раскладчика и координата раскладчика Li(), определяющая начало снижения скорости намотки перед реверсом.
Параметры Пр и LI могут быть установлены практическим путем для каждого конкретного изделия.
Блок 1 ввода технологических данных обрабатывает вводимую информацию и пересылает результаты вычислений в соответствующие блоки:
- в блок 2 управления длиной намотки величины L и , соответствующие числу импульсов, вырабатываемых вторым датчиком 13 при перемещении раскладчика на расстояния L и LI соответственно;
- в блок 3 управления шагом намотки величину тв, соответствующую числу импульсов, вырабатываемых первым датчиком 6 за время одного витка, и величину гщ, соответствующую числу импульсов, вырабатываемых вторым датчиком 13 при перемещении раскладчика на шаг Намотки t;
- в блок 10 управления скоростью величины п и пр, соответствующие числу импульсов, вырабатываемых первым датчиком 6 за интервал времени Т и пропорциональных скорости намотки:
1/ П щ
n... Kw.Ni
где N1 - число импульсов первого датчика 6 за один оборот;
: К - коэффициент, определяемый меха никойстанка.,
Устройство работает следующим обра зом....О-s;.:,.-; 1, :.;---;;: : -::; -. ./,.. ..
Блок 10 управления скоростью осуществляет измерение текущего значения и управление изменением скорости.
; Генератор 21 вырабатывает последова- тельность ТйктовЫх импульсов, передним фронтом которых осуществляется перезапись содержимого счетчика 11 в регистр 18 текущей скорости, а задним фронтом t- перезапускается интервальный таймер 12 для выполнения очередного цикла измерения скорости. -
Содержимое регистра 18 текущей ско- росТи сравнивается с содержимым одного из регистров 14 или 15 схемой сравнения кодов 17, Подключение требуемого регистра к схеме 17 сравнения кодов осуществляется коммутатором 16 по сигналу, поступающему с четвертого выхода блока 2 управления длиной намотки. Выход схемы 17 сравнения кодов подключен ко входу управления направлением счета реверсивного счетчика
19, на счетный вход которого поступают импульсы с выхода делителя частоты 22.
В случае, если текущая скорость меньше значения содержимого того из регистров 14 или 15, который подключен к схеме срав- нения кодов 17, то счетчик 19 работает в режиме суммирования, в противном же случае (текущая скорость больше, заданного значения)-в режиме вычитания.
Таким образом, после цифро-аналогового преобразования на выходе преобразователя 20 формируется напряжение регулирований скорости и первого двигателя 5, поступающее в блок 4 управления первым электродвигателем. Первыйдвигатель5механическисвязанс6 шпинделем станка и первым импульсным датчиком 6 скорости. Импульсы последнего поступают на счетный вход счетчика 11 импульсов для измерения скорости и на первый вход блока 7 формирования задания на переме- щение подачи,; . ;
В блоке 7 под управлением блока Зуп- равления шагом намотки из то импульсов, генерируемых первым датчиком 6 за время одного витка отбирается число mt импуль- сов, соответствующее количеству импульсов, генерируемых вторым датчиком 13 за время перемещения раскладчика на шаг t Выделенные импульсы в качестве задания на перемещение раскладчика поступают в блок 8 управления вторым двигателем, где формируется сигнал управления скоростью вращения второго двигателя 9, перемещающего раскладчик.... / , .,
На второй вход блока 8 управления вто- рым двигателем поступает знак задания с триггера знака задания 28 блока управления длиной намотки, на третий - импульсы перемещения, а на четвертый - знак перемещения, формируемые блоком 29 обработ- ки сигнала датчика блока 2,. V,
При движении раскладчика второй импульсный датчик 13 на своих выходах вырабатывает две последовательности импульсов fi и f2, сдвинутые по фазе на 90°, что позво-; ляет определить направление вращения (знак перемещения).
, На выходе элемента Й-НЕ 41 формируется последовательность импульсов,; число которых пропорционально перемещению раскладчика, на выходе элемента Й-Н Е 43 - знак перемещения, а на выходе элемента ИЛИ 44 вырабатывается короткий импульс, соответствующий по времени моменту ре- верса раскладчика. Импульсы перемещения со второго выхода блока 29 обработки сигнала датчика поступают на счетный вход счетчика 30, содержимое которого сравнивается со значениями U и L(Li .находящимися в регистрах 23 и 24 соответственно, при помощи схем сравнения 26 и 27.
При достижении счетчика 30 значения, равного LI, на выходе схемы сравнения 26 появляется сигнал, устанавливающий триггер управления скоростью 25 в состояние, при котором в блоке 10 управления скоростью коммутатор 16 подключает к схеме сравнения кодов 17 регистр пр 15, что приводит к плавному снижению скорости намотки до значения пр.
При достижении счетчиком ЗОзначения, равного L, на выходе схемы сравнения 27 появится сигнал, изменяющий состояние триггера знака задания 28, выход которого (соединенный с первым выходом блока 2.и со вторым входом блока 8) задает реверс второго двигателя 9.
:...: С изменением направления движения раскладчика в момент начала движения в .обратную сторону на первом выходе блока 29 обработки сигнала датчика вырабатывается короткий импульс, который сбрасывает счетчик 30 в нулевое состояние, а также устанавливает триггер 25 управления скоростью. В результате этого на выходе триггера 25 (четвертом выходе блока 2) устанавливается такой уровень сигнала, который подключает к схеме сравнения кодов 17 в блоке 10 регистр п 14, что приводит к плавному возрастанию скорости намотки до номинального значения п.
В установившемся режиме (знак перемещения совпадает со знаком задания) импульсные сигналы задания и реального перемещения раскладчика поступают через схемы 2-2И-ИЛИ 48. 49, используемые в качестве коммутаторов, на счетные входы +1, -1 реверсивного счетчика 50. Здесь подсчитывается разность между реальным перемещением и задание на перемещение раскладчика, т.е. ошибка по положению.
. Перед запуском устройства в счетчик 50 записывается комбинация 1000...000, где старший разряд является знаковым, а остальные представляют собой код ошибки по положению.: .
Если знаковый разряд равен единице, то значение ошибки по положению представлено в прямом коде. Если же знаковый разряд равен нулю, то значение ошибки по положению представлено в дополнительном, коде. В этом случае схема 51 преобразования из дополнительного кода в прямой, управляемая знаковым разрядом Aq, формирует значение в прямом коде.
Скорректированный, как вышеописано, код ошибки по положению и знаковый разряд подаются на вход цифро-аналогового преобразователя 52. на выходе которого
получается аналоговый сигнал, пропорциональный величине ошибки по положению, имеющий соответствующий знак и являющийся сигналом задания для электропривода 53.
Таким образом, расширение области применения устройства за счет контроля скорости намотки, а также контроля реального положения раскладчика, позволяет в высокоскоростных станках путем снижения скорости намотки перед реверсом раскладчика избежать нахлеста провода на краях катушки, что существенно повышает качество наматываемого изделия.
Формула изобретения 1. Устройство для управления намоточным станком, содержащее блок ввода технологических данных, первый выход данных которого подключен к первому информационному входу блока управления длиной намотки, второй выход данных - к информационному входу блока управления шагом намотки, блок управления первым двигателем, выход которого электрически соединен с первым двигателем, вал которого механически связан с импульсным датчиком скорости, выход которого подключен к первому входу блока формирования задания на перемещение подачи, второй вход которого соединен с выходом блока управления шагом намотки, а выход подключен к первому входу блока управления вторым двигателем, второй вход которого соединен с выходом знака задания блока управления длиной намотки, а выход электрически соединен с вторым двигателем, отличающееся тем, что, с целью расширения области применения, в него введены блок управления скоростью намотки, счетчик импульсов, интервальный таймер и механически связанный с валом второго двигателя импульсный датчик перемещения, первый и второй выходы которого подключены к второму и третьему информационным входам блока управления длиной намотки, первый и второй выходы которого подключены соответственно к третьему и четвертому входам блока управления вторым двигателем, а третий выход - к управляющему входу блока управления скоростью намотки, первый информационный вход которого соединен с выходом задания блока ввода технологических данных, а первый выход - с входом интервального таймера, выход которого подключен к стробирующему входу счетчика импульсов, счетный вход которого Соединен с выходом импульсного датчика
скорости, а выход - с вторым информационным входом блока управления скоростью намотки, второй выход которого подключен к входу блока управления первым двигате5 лем, при этом блок управления скоростью намотки содержит первый и второй регистры, коммутатор, схему сравнения кодов, регистр текущей скорости, реверсивный счетчик, цифроаналоговый преобразова10 тель, генератор тактовых импульсов и делитель частоты, вход которого соединен с выходом генератора тактовых импульсов, первым выходом блока и тактовым входом регистра текущей скорости, вход которого
15 соединен с вторым информационным входом блока, а выход подключен к первому входу схемы сравнения кодов, выход которой подключен к входу управления направлением счета реверсивного счетчика, счетный
0 вход которого соединен с выходом делителя частоты, а выходы - с входами цифроанало- гового преобразователя, выход которого соединен с вторым выходом блока, первый информационный вход которого соединен с
5 входами первого и второго регистров, выходы которых подключены.соответственно к . первому и второму информационным входам коммутатора, управляющий вход которого соединён с управляющим входом
0 блока, а выход - с вторым входом схемы сравнения кодов.
2, Устройство по п. 1, о т п и ч а ю щ е е- с я тем, что блок управления длиной намотки содержит первый и второй регистры,
5 триггер управления скоростью, первую и
.вторую схемы сравнения кодов, триггер знака задания, блок обработки сигнала датчика
и счетчик, вход сброса которого соединен с третьим выходом блока и вторым выходом
0 блока обработки сигнала датчика, первый и
второй входы которого соединены соответст. венно с вторым и третьим входами блока,
третий выход - с четвертым выходом блока,
а первый выход Подключён к счётному входу
5 счетчика и к входу сброса триггера управления скоростью, выход которого соединен с вторым выходом блока, а вход установки - с выходом первой схемы сравнения кодов, к первому входу которой подключен выход
0 счетчика, подключенный также к первому входу второй схемы сравнения кодов, выход которой подключен через триггер знака задания к первому выходу блока, а второй вход соединен с выходом второго регистра,
5 вход которого соединен с первым входом блока и с входом первого регистра, выход которого подключен к второму входу первой схемы сравнения кодов.
| Счетно-командное устройство для намоточного станка | 1984 |
|
SU1205129A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Станок для намотки электрических катушек | 1982 |
|
SU1108518A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
